
Fターム[5H004MA04]の内容
フィードバック制御一般 (10,654) | 制御装置の具体的構成 (550) | メモリ (84)
Fターム[5H004MA04]の下位に属するFターム
Fターム[5H004MA04]に分類される特許
1 - 11 / 11
PID制御装置
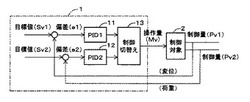
【課題】2系統のPID制御の切替えを可能にしたPID制御装置において、制御対象からの制御量にノイズが含まれていても、切替えを行う際に目標値の変更だけで制御対象でショックが発生しないようにする。
【解決手段】第1PID演算部11で変位の制御量Pv1と目標値Sv1との偏差e1によりPID演算し、演算結果を制御切替え部13に出力する。第2PID演算部12で荷重の制御量Pv2と目標値Sv2との偏差e2によりPID演算し、演算結果を制御切替え部13に出力する。PID演算アルゴリズムの過程で、微分項Dnと比例項Pnを除いた積分項TnのみでMvtの値を演算し、Mvtをメモリに逐次記憶する。切替え時に、Mvtを操作量として制御対象2に出力する。
(もっと読む)
プラントの制御装置及び火力発電プラントの制御装置

【課題】本発明の目的は、将来的に予測されるプラントの運転状態の変化をも考慮に入れた、プラントの環境負荷物質低減及び運転効率改善を実現する制御ロジックを自律学習する機能を具備させることで、プラントの運転条件変更に対してロバストな制御を提供する。
【解決手段】本発明のプラントの制御装置は、運転情報データベースと運転特性計算部の組み合わせ又は機器情報データベースと機器特性計算部の組み合わせのいずれか一つを含み、前記運転特性計算部、又は機器特性計算部が計算した特性値を用いてプラントの運用コストを評価するコスト評価部と、前記コスト評価部が出力するコスト評価値が最適となるようにプラントに与える制御信号の生成方法を自律学習する操作方法学習部とを備え、前記操作方法学習部は、前記コスト評価部が出力するコスト評価値を手掛かりに操作方法を学習するように構成する。
(もっと読む)
プログラマブルコントローラ及びそのシーケンスプログラム動作検証方法
【課題】
プログラマブルコントローラにおいて、シーケンスプログラムを変更することなく、実時間レベルでのシミュレーションを可能とする。
【解決手段】
CPUが、シーケンスプログラムに従った処理演算及び負荷装置の擬似回路がサブルーチンとして追加されたシミュレーション用シーケンスプログラムに従ったシミュレーション処理演算を行う制御部と、該シーケンスプログラム及び該シミュレーション用シーケンスプログラムを格納するメモリと、該制御部が行った処理演算の結果を格納するメモリとを備え、該制御部が、シーケンスプログラムの動作検証を行うとき、シミュレーション用シーケンスプログラムに従ったシミュレーション処理演算と、該処理演算の結果の評価を行う構成とする。
(もっと読む)
モデル予測制御装置、プログラム
【課題】制約付きモデル予測制御において制約の緩和回数が増えて実行時間オーバを起こす可能性を低くする。
【解決手段】条件付き最適化計算に用いる制約の復帰処理において、現在の制御量検出値yが特定の制約復帰条件を満たすかどうかを判断し(ステップS21)、満たす場合のみ制約緩和レベルは一段復帰させる(ステップS22)。所定の制約復帰条件を満たさない限り制御量制約の復帰を行わないようにすることで、制約付き最適化計算において解なしとなる可能性を低くし、以って、制約の緩和が再度必要になる可能性を低くできる。これより、計算負荷が大きい制約付き最適化処理の頻度が大きくなることを防止し、実行時間増大を防止できる。
(もっと読む)
PIDコントローラのチューニング装置、PIDコントローラのチューニング用プログラムおよびPIDコントローラのチューニング方法
【課題】PIDコントローラが、精度良くプロセスを制御できるようにする。
【解決手段】チューニング装置100では、コントローラ10とプロセス20から構成される実際のシステムの操業データを利用して、仮想のコントローラ51と仮想のプロセス52のモデル化を行い、そして、得られたプロセス52のモデルを用いて、コントローラ51の最適な制御パラメータを算出し、その値を参考に、実際のコントローラ10のチューニングを行う。
(もっと読む)
プラント制御装置、プラント制御方法、プラント制御プログラム、および、そのプログラムを記録した記録媒体
【課題】運転状態が大きく変動する場合でも熟練を要さずに安定した良好な運転状態に制御できるプラント制御装置を提供する。
【解決手段】運転内容変更認識手段343により運転内容がナフサを処理する定常運転である場合、状態制御手段342にてセンサ400で検出した運転状態データを第一目標値にするPID制御をする。コーク除去の非定常運転の場合、付加制御手段344は、状態制御手段342にてセンサ400で検出した運転状態データを第二目標値にするPID制御か、状態制御手段342にて制御する制御量に制御量データの値を加算させてPID制御を実施させる。
(もっと読む)
車両の制御装置および制御方法
【課題】運転者が期待する駆動力をより精度よく反映した駆動力を得る。
【解決手段】ECUは、アクセル開度センサ8010から送信された信号に基づいてアクセル開度を検出するステップ(S100)と、車両から実際に出力される現在の駆動力を算出するステップ(S102)と、車両から実際に出力される現在の駆動力およびアクセル開度に応じて、運転者が期待する駆動力を推定するステップ(S104)と、運転者が期待する駆動力と、車両が実際に出力する現在の駆動力との差が小さくなるように、スロットル開度の目標値を決定するステップ(S106)と、実際のスロットル開度が目標値と一致するように電子スロットルバルブ8016を制御するステップ(S108)とを含む、プログラムを実行する。
(もっと読む)
モデル作成装置並びにプロセス異常分析装置およびそれらの方法並びにプログラム
【課題】 同一のレシピのサンプル数が少なくても精度の高い品質−モデルを作成できるモデル作成装置を提供すること
【解決手段】 プロセスが実行されている期間中に時系列に取得されるプロセスデータからプロセス特徴量を抽出するプロセスデータ編集部22と、そのプロセスで処理された対象品の検査結果についての情報である検査データ中の計測値と、設計値と、の差分を求める検査データ編集部27と、プロセス特徴量と検査データとを用いて、データマイニングや多変量解析による解析を実行する際に、検査データ編集部で求めたプロセス処理の結果得られた計測値とその設計値との差分を目的変数とし、抽出したプロセス特徴量データを説明変数としてプロセス−品質モデルを作成する解析部32と、を備えた。差分を目的変数とすることで、異なるレシピから得られたデータをサンプルとして使用できるので、必要なサンプル数を容易に取得し、高精度なモデルが作成できる。
(もっと読む)
行動制御装置および行動制御方法、並びに、プログラム
【課題】次元に呪われることなく、予測学習を行う。
【解決手段】予測部131は、自律エージェントが、時刻tに取ったアクションAtとセンサ入力Stから、時刻t+1のセンサ入力が取る値を常に予測学習し、学習に、統計学習による関数近似器を使う。ゴール生成部132は、予め設計されてタスクに応じた目標状態を計画部133に与える。計画部133は、現在の状態から目標状態に達するまでの行動シーケンスをプランする。目標までのプランが生成できた場合、そのシーケンスが順に実行され、プランが成功した場合、目標状態を固定入力として、観測した状態と選択したアクションの関係が学習される。制御部134は、計画部133による計画と環境とを教師とした学習を実行し、自律エージェントのアクションを制御し、アクションが成功した場合、その入出力関係を学習する。本発明は、自律エージェントの自律行動制御モデルに適用できる。
(もっと読む)
リソグラフィ装置、位置量コントローラ及び制御方法
【課題】第1の可動部と第2可動部の相対位置誤差を小さくしたリソグラフィ装置、位置量コントローラ及び制御方法を提供すること。
【解決手段】リソグラフィ装置は、第1の可動要素と、第1の可動要素の位置量を制御するための第1の制御システムとを備える。また、リソグラフィ装置は、第2の可動要素と、第2の可動要素の位置量を制御するための第2の制御システムとを備える。トラッキング誤差即ち第1の可動部と第2の可動部の間の相対誤差を小さくするために、第1及び第2の制御システムに提供される設定値信号に同期してフィードフォワード信号を生成するためのフィードフォワード・テーブル・プログラミングを備えたフィードフォワード・テーブルが提供される。第1の可動要素の位置量を修正し、それにより第1の可動要素の位置量と第2の可動要素の位置量の間の相対誤差を小さくするために、第1の制御システムにフィードフォワードが提供される。
(もっと読む)
プラントの制御装置
【課題】非線形補償器を用いた制御において、非線形補償器の非線形補償を実際の非線形特性に適合させるようにしたプラントの制御装置を提供する。
【解決手段】線形要素と非線形要素とを含んだエンジンの可変位相機構42について、線形要素に基づいた応答指定型制御アルゴリズムに従ってプラントの出力Cainを位相目標値Cain_cmdに収束させる仮入力Uslを算出する線形コントローラ110と、仮入力とプラントの非線形要素の特性を相殺するように設定された非線形補償器112に基づいて制御入力Ucainを算出するプラントの制御装置において、線形要素のみから構成される制御対象モデル114aによって算出されたプラントの出力推定値Cain_estと、プラントの出力検出値Cainの誤差e_nlとに基づいて非線形補償器112を修正する非線形特性適応器(修正手段)114とを備える。
(もっと読む)
1 - 11 / 11
[ Back to top ]