
Fターム[5H115QI01]の内容
車両の電気的な推進・制動 (204,712) | 制動、停止 (3,697) | 制動の種類 (3,172)
Fターム[5H115QI01]の下位に属するFターム
Fターム[5H115QI01]に分類される特許
1 - 7 / 7
ハイブリッド車両の制御装置
【課題】モータジェネレータと駆動輪とを断接する第2クラッチの保護を適切に行う。
【解決手段】内燃機関10と、モータジェネレータ20と、前記内燃機関と前記モータジェネレータとの間に介装され前記内燃機関と前記モータジェネレータとを断接する第1クラッチ15と、前記モータジェネレータと駆動輪との間に介装され前記モータジェネレータと前記駆動輪とを断接する第2クラッチ25とを備えたハイブリッド車両の制御装置であって、前記第2クラッチの温度を検出する温度検出手段と、ストール停車状態を判定するストール停車状態判定手段と、ストール停車状態と判定され前記第2クラッチの温度が所定温度以上である場合に前記第1クラッチおよび前記第2クラッチを共に締結するクラッチ保護制御を行うクラッチ保護制御手段と、クラッチ保護制御が行われ前記駆動輪がロックされていない場合に前記内燃機関の始動を禁止する始動禁止手段とを備える。
(もっと読む)
在線位置検出方法、ブレーキ制御方法、進路制御方法、車上装置及び管理装置

【課題】在線位置を検出するための新たな仕組みを提案すること。
【解決手段】列車に搭載された車上装置1は、軌道に沿って設置されたICタグ3と非接触式の近距離無線通信を行って、自列車の在線位置を検出する。すなわち、車上装置1は、走行予定区間の軌道に沿って設置されたICタグ3の識別情報であるタグIDが列車の走行順と対応付けられたICタグリスト情報を、走行予定区間の始点出発時に管理装置5から取得する。走行予定区間の走行時は、先頭側車両及び後尾側車両に設置されたタグリーダー120,130によってICタグ3のICタグ情報が読み取られる。そして、車上装置1は、タグリーダー120,130により読み取られたICタグ情報を、管理装置5から取得したICタグリスト情報と照査することで、自列車が在線しているブロックを検知する。
(もっと読む)
ハイブリッド四輪駆動車の回生制動力制御装置
【課題】回生制動時のヨー安定性を向上させることができるハイブリッド四輪駆動車の回生制動力制御装置の提供を課題とする。
【解決手段】上記課題は、前後輪の一方で常時駆動される第1駆動輪を第1動力源(例えばエンジン)で駆動し、前後輪の他方で必要に応じて駆動される第2駆動輪を第2動力源(例えば電動機)で駆動し、クラッチ機構によって第1駆動輪と第2駆動輪との間の機械的な接続状態を開放状態から直結状態まで変化させることができるハイブリッド四輪駆動車両において、回生制動時、クラッチ機構が開放状態にあるときには、第2駆動輪の制動力を理想制動力配分よりも大きく設定することにより解決できる。
(もっと読む)
車上制動制御システム及び車上制動制御方法
【課題】踏切の安全性を高めるため、正常に列車検知がなされているかを、地上設備の増設を必要とせずに車上側で判断可能とすること。
【解決手段】HC−Nタイプの踏切制御子30Aは、常時、列車検知信号f1をレール10に出力しているとともに、この列車検知信号f1の受信レベルの変化から列車20を検知し、列車20を検知すると検測車用信号f2をレール10に出力する。列車20に搭載される車上制動制御システムでは、前受電器200及び後受電器300での列車検知用信号f1及び検測車用信号f2の検出有無の変化にもとづいて、踏切制御子30Aにて列車検知が正常になされているかを判断し、正常になされていない可能性があるときには、踏切防護のために列車20を制動させる。
(もっと読む)
車両用制動装置
【課題】燃費を悪化させずに吸気負圧を生成すること。
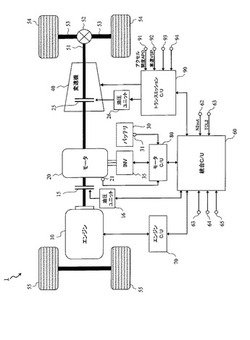
【解決手段】エンジン10と、発電機(第1モータ/ジェネレータ30)と、電動機(第2モータ/ジェネレータ50)と、エンジンの出力を駆動輪WFL,WFR及び発電機に伝達可能で且つ電動機の出力を駆動輪に伝達可能な動力分割機構20と、エンジンの吸気負圧を利用して運転者の制動操作時のアシスト力を発生する倍力手段72と、動力分割機構におけるエンジンと発電機と電動機とに係る各回転要素の回転数の相対関係を直線で表した共線図を用いてそのエンジン等の各回転数の制御を行う制御手段(ハイブリッドECU80等)と、を有し、エンジンが燃料カット中又は停止中で且つエンジンの吸気負圧量が基準吸気負圧量よりも少ないときに、エンジンの回転数を上昇させるべく共線図を利用して発電機と電動機の回転数の制御を行う吸気負圧生成手段(ハイブリッドECU80)を設けること。
(もっと読む)
電動機制御方法及び電動機制御装置
【課題】空転滑走発生時のトルクのアンバランスを抑制するための新たな技術を提案すること。
【解決手段】主電動機信号切替部220は、現在の走行状態が力行であれば、進行方向最後方軸である第2軸を基準軸として、第2軸の電動機電流及び回転子角周波数をもとに磁束成分電流フィードバック値Id*と、トルク成分電流フィードバック値Iq*と、電動機の回転子角周波数ωr*とを算出する。現在の走行状態が制動であれば、主電動機信号切替部200は、進行方向最前方軸である第1軸を基準軸として、第1軸の電動機電流及び回転子角周波数をもとに磁束成分電流フィードバック値Id*と、トルク成分電流フィードバック値Iq*と、電動機の回転子角周波数ωr*とを算出する。
(もっと読む)
鉄道用画像伝送装置及び非常制動画像確認システム
【課題】列車の非常制動をトリガにしてその直前からの画像データを保存できると共に、列車の運転士が介在することなく、指令センタにおいて必要な画像だけを指令センタにて確認でき、運転士の負担を軽減し、かつ指令センタにおける正確かつ迅速な状況把握を支援すること。
【解決手段】先頭車両1においてカメラ11で列車進行方向の映像を撮像する一方、当該撮像された画像データをメモリ装置13に所定時間遡って記憶し、非常制動検知部16にて列車の非常制動が検出されたならば、メモリ装置13において所定時間遡った時点までの非常制動画像となる画像データを保持する。一方、画像保持・列車位置通知部17が非常制動画像が保持されたことを指令センタ5へ通知する。指令センタ5においてオペレータが非常制動画像を確認するか否か判断する。指令センタ5から保持像要求が出されたならば、車両搭載レコーダ2から非常制動画像を要求元へ伝送する。
(もっと読む)
1 - 7 / 7
[ Back to top ]