
Fターム[5H115QI07]の内容
車両の電気的な推進・制動 (204,712) | 制動、停止 (3,697) | 制動の種類 (3,172) | 機械制動 (643)
Fターム[5H115QI07]の下位に属するFターム
空気ブレーキ (64)
エンジンブレーキ(排気ブレーキを含む) (95)
Fターム[5H115QI07]に分類される特許
1 - 20 / 484
車両の制御装置
【課題】リチウムイオン二次電池を搭載した車両において、Li析出を抑制するための制御を実行した上で、回生発電による回収エネルギを確保しつつ車両制動力の瞬間的な変動によって車両運転性が低下しないようにする。
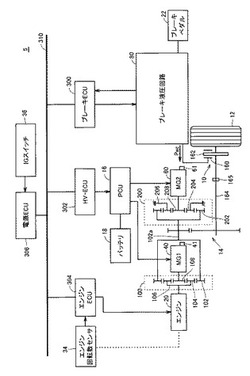
【解決手段】HV−ECU302は、リチウムイオン二次電池であるバッテリ18におけるLi析出を抑制するために、バッテリ18の充放電履歴に基づいて充電電力上限値を調整する。さらに、HV−ECU302は、調整された充電電力上限値の範囲内でブレーキペダル操作に対応した要求制動力に対する、制動装置10による液圧制動力と、第2MG60による回生制動力との分担を決定するブレーキ協調制御を実行する。Li析出を抑制するために充電電力上限値を制限する際における充電電力上限値の制限度合は、制動装置10に液圧を供給するためのブレーキ液圧回路80での液圧応答レートの検出値に応じて可変に設定される。
(もっと読む)
車両のブレーキシステム

【課題】非協調ブレーキシステムにおいて、回生ブレーキの利用によりエネルギの有効利用を図りつつ、運転者がブレーキ操作時に違和感を覚えることを常に防止する。
【解決手段】回生ブレーキ手段40による回生制動力を制御する回生ブレーキ制御手段を、ブレーキ操作手段22の制動操作開始時のストローク変化が検出されたときに回生ブレーキ手段40を制御する第1期間制御手段と、該第1期間制御手段に続いて回生ブレーキ手段40の制御を行う第2期間制御手段とで構成し、前記第1期間制御手段により、ブレーキ操作検出手段52により検出される制動力増大方向のストローク変化が大きいほど回生制動力が大きくなるように回生ブレーキ手段40を制御し、前記第2期間制御手段により、蓄電手段42の残容量が所定値Y以上であるとき、前記第1期間制御手段による制御時に比べて回生制動力が減少するように回生ブレーキ手段40を制御する。
(もっと読む)
回生制動制御装置
【課題】回生式制動装置を備える車両において回生効率を向上させる。
【解決手段】回生制動制御装置24は、車両の前輪に回生制動力を伝達可能な第1回生制動手段56f、及び車両の後輪に回生制動力を伝達可能な第2回生制動手段56rの各々を制御する回生制動制御装置であって、第1回生制動手段及び第2回生制動手段の各々に要求される回生制動力の合計値である要求回生制動力を算出する要求回生制動力算出手段と、要求回生制動力を、第1回生制動手段及び第2回生制動手段で配分して実現する場合のエネルギ損失が、最も小さくなる配分比を算出する配分比算出手段と、算出された配分比で要求回生制動力を実現するように、第1回生制動手段及び第2回生制動手段を夫々制御する制御手段とを備える。
(もっと読む)
ハイブリッド車両の駆動制御装置
【課題】要求制動トルクをモータジェネレータによる制動トルクおよび機械式ブレーキによる制動トルクの両方で分担する場合に、エンジンを始動する際の駆動力変動をモータジェネレータによって適切に抑制できるようにする。
【解決手段】エンジン12を始動する際に、予め駆動系制動トルクの分担量上限値が制限され、それに伴ってモータジェネレータMGによる制動トルクの分担が低減される一方、その制動トルクの低下を補完するように油圧ブレーキ62による制動トルクの分担が大きくされる。このため、制動トルク制御とエンジン12の始動制御とが重なった場合でも、要求制動トルクに応じた制動トルクを発生させつつモータジェネレータMGによる制動トルクに余裕を残すことができ、そのモータジェネレータMGによる制動トルクの制御でエンジン12の初爆トルクを適切に吸収して駆動力変動を抑制することができる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 連続変速時であってもショックを回避可能なハイブリッド車両の制御装置を提供すること。
【解決手段】 エンジンとモータとの間の駆動力の伝達を断接する第1クラッチと、モータから駆動輪へ伝達される駆動力の伝達を断接する第2クラッチと、自動変速機の変速中に、第2クラッチをスリップ状態とするスリップ制御手段と、を備えたハイブリッド車両の制御装置において、スリップ制御手段は、現在の変速と次の変速とを連続で行う連続変速中に、現在の変速が終了した後、かつ、次の変速が終了する前に第2クラッチのスリップ状態を完全締結状態に移行させる場合には、第2クラッチの締結圧を徐々に上昇させることとした。
(もっと読む)
車両
【課題】モータジェネレータの回転速度を制限する。
【解決手段】車両は、運転者が操作するスイッチと、スイッチが操作されると停止するエンジンと、モータジェネレータと、エンジン回転速度がゼロから増大するとモータジェネレータの回転速度が減少するようにエンジンの出力軸とモータジェネレータの出力軸とを連結する動力分割装置と、スイッチを操作することによってスイッチエンジンが停止した状態でモータジェネレータの回転速度が増大した場合、エンジン回転速度がゼロから増大するように制御するECUとを備える。
(もっと読む)
車両用走行制御装置及び車両用走行制御方法
【課題】ハイブリッド車両の車速制限制御時において、より適切にエンジン運転状態を制御する。
【解決手段】駆動輪7L,7Rに駆動力を伝達する駆動源としてエンジン1及びモータジェネレータ2を有するハイブリッド車両の走行速度を、ステアリングスイッチ28で設定されたリミッタ車速以下で維持するように自動調整する制御であるASL制御を行っているときに、アクセルペダル33の操作に応じたドライバ要求トルクと、車速制限時の駆動トルクである車速リミッタトルクとのセレクトローによって決定される目標駆動トルクから逆算して求められる擬似アクセル開度VAPOに基づき、エンジン1を始動するか又は停止するかのいずれかの判定を行う。
(もっと読む)
車両の発進制御装置
【課題】 車両発進時のクラッチジャダーを抑制できる車両の発進制御装置を提供する。
【解決手段】 車両の発進時、モータジェネレータMGと左右後輪RL,RRとの間に介装した第2クラッチCL2をスリップ締結状態からロックアップ締結状態へと移行させる車両の発進制御装置において、クラッチジャダーの発生が予測または検出された場合には、予測または検出されない場合よりもスリップ締結状態からロックアップ締結状態への移行時間を短くする。
(もっと読む)
車両の制御装置
【課題】 コースト走行時に安定した車両挙動が得られる車両の制御装置を提供すること。
【解決手段】 駆動輪に駆動力と回生制動力とを付与するモータと、各輪に摩擦制動力を発生するブレーキ手段と、従動輪及び駆動輪の車輪速を検出する車輪速検出手段と、運転者に加速意図が無いときは運転者の制動要求に関わらずコースト回生制動力を付与するコースト回生制御手段と、運転者のブレーキ操作時に回生制動力の変化に応じて摩擦制動力を調整する協調回生制動の制御中に、前記車輪速検出手段により検出された従動輪車輪速よりも駆動輪車輪速が第1所定値以上低下したときは、駆動輪の回生制動力を低下しつつ従動輪の摩擦制動力を増加させる協調回生制御手段と、前記車輪速検出手段により検出された従動輪車輪速よりも駆動輪車輪速が前記第1所定値よりも大きな第2所定値以上低下したときは、前記コースト回生制動力を小さくするコースト回生制動力変更手段と、を備えた。
(もっと読む)
ハイブリッド車両の制御装置
【課題】ノーマル運転パターンと判定される通常運転中でも、運転者が高応答運転モードを選択すると、ハイブリッド走行領域を拡大する。
【解決手段】高応答運転モードModehr選択中であって、動力性能重視運転パターンPat(PWR)および燃費重視運転パターンPat(ECO)の中間的なノーマル運転パターンPat(NOR)である場合、エンジン始動線として中間用エンジン始動線を選択し、Modehr選択中にノーマル運転パターンPat(NOR)である場合のハイブリッド走行領域を、燃費重視運転パターンPat(ECO)でのハイブリッド走行領域よりも拡大させる。このため、Pat(NOR)と判定される通常運転中でも、運転者がModehrを選択すると、エンジン動力を用いたハイブリッド走行が行われ易くなる。
(もっと読む)
車両用制動装置
【課題】ビルドアップ制御を行う車両制動装置において、ビルドアップによる制動力を適切に設定する。
【解決手段】モータ駆動シリンダ8と、ペダルストロークセンサ11aと、ディスクブレーキ3と、制御ユニット6とを有するブレーキ装置であって、ブレーキ液圧を検出する液圧センサ16を有し、制御ユニットが、ブレーキペダル操作量の変化量に応じて、通常マップと、ビルドアップマップとのいずれかを選択し、ブレーキペダル操作量に基づいて選択したマップを参照し、ブレーキ液圧規範値を設定するブレーキ液圧規範値設定部23と、ブレーキ液圧規範値とブレーキ液圧との差に基づいてブレーキ液圧規範値を補正する補正値設定部25および加算器26と、補正されたブレーキ液圧規範値に応じて目標値を設定するストローク目標値設定部28とを有する。
(もっと読む)
ハイブリッド式作業機の冷却システム
【課題】ハイブリッド式作業機に搭載される冷却システムにおいて、簡素な構成で、低温時のエネルギー効率低下を防止する。
【解決手段】低温時には、低温モードが選択され、PCU25のヒートモード機能25aが作動する。すなわち、PCU25は、キャパシタ23のエネルギー回収割合を、通常モードのキャパシタ23のエネルギー回収割合の最大値以上(例えば、アシストモータ22:キャパシタ23=2:8)に設定する。通常モードに比べ、キャパシタ23に充電するエネルギーが増加し、キャパシタ23が発熱することにより、冷却媒体の液温が上昇する。これにより、冷却媒体の粘性が低下する。
(もっと読む)
電池制御装置およびこれを備えた蓄電装置
【課題】複数の単電池セルを備えた蓄電装置において、各単電池セルを個別に充電を行うことによって効率の良い充放電を行うことができる電池制御装置を提供する。
【解決手段】
本発明に係る電池制御装置は、直列に接続した複数個の単電池セルのそれぞれを選択する第1のスイッチを有し、この第1のスイッチで選択された単電池セルを放電する放電回路と、当該複数個の単電池セルのそれぞれを選択する第2のスイッチを有し、この第2のスイッチで選択された単電池セルを充電する充電回路と、当該複数個の単電池セルの正極と負極に各々が接続された電圧検出線を介してそれぞれの単電池セルの電圧を検出する電圧検出部と、この電圧検出線に高周波を照射する発振器と、電圧検出部で検出した当該単電池セルの電圧に基づいて、第1のスイッチの開閉を制御して当該単電池セルの放電を行う放電制御部と、第2のスイッチの開閉を制御して当該単電池セルの充電を行う充電制御部とを備える。
(もっと読む)
電気自動車
【課題】快適な操作性能を確保するとともに、走行安定性に優れた電気自動車を提供する。
【解決手段】電気自動車1は、前輪側の左右輪に制駆動力を伝達する前輪用モータ3fと、後輪側の左右輪に制駆動力を伝達する後輪用モータ3rと、前輪用モータ3fを駆動する前輪用インバータ8fと、後輪用モータ3rを駆動する後輪用インバータ8rとを備え、前輪用モータ3f及び後輪用モータ3rは、車体の中心25aに対して線対称又は点対称に配置され、前輪用インバータ8f及び後輪用インバータ8rは、前輪用モータ3f及び後輪用モータ3rが線対称に配置されているときは線対称に配置され、前輪用モータ3f及び後輪用モータ3rが点対称に配置されているときは点対称に配置された。
(もっと読む)
電動車両のブレーキ制御装置
【課題】回生協調ブレーキ制御中にABS制御が介入したとき、制御干渉の防止と、制御再介入の頻度抑制と、回生エネルギー量確保の実効と、を併せて達成すること。
【解決手段】ハイブリッド車のブレーキ制御装置は、液圧制動手段であるブレーキ液圧発生装置1と、回生量制御手段であるモータコントローラ8と、回生協調ブレーキ制御手段である統合コントローラ9と、ABS制御手段であるブレーキコントローラ7と、を備える。統合コントローラ9は、回生協調ブレーキ制御中にABS制御が介入したとき、ABS制御介入中は回生制動要求を停止し、ABS制御が非作動状態へ移行すると、前回のABS制御介入時の回生量を超えない値に制限した回生量を今回の回生量リミッタとする制限付き回生制動要求による回生協調ブレーキ制御に復帰するABS介入時回生協調ブレーキ制御を行う(図3)。
(もっと読む)
車両用制御装置
【課題】車両発進直後のブレーキ操作時には既に錆取りが行われていることを保証すること。
【解決手段】車両の主電源(イグニッションスイッチ43)オン時に、ディスクロータ15の摩擦面15Aの発錆が検出されている場合には、摩擦制動手段19が摩擦制動力を発生する制御を行う。
(もっと読む)
車両用ブレーキ装置
【課題】ブレーキ・バイ・ワイヤシステムにおけるブレーキ力の増減時の応答性を簡単な構成で運転者の感覚に合うようにする。
【解決手段】ブレーキペダルのストロークを操作量として操作量制動力変換回路31に入力し、その出力信号を増加用ローパスフィルタ32と減少用ローパスフィルタ33とに入力し、各出力を最大値選択回路34により大きい方を選択し、各ローパスフィルタの出力の大きい方で制御目標値Bmaxを生成し、制御目標値Bmaxが最終的な制動力目標値となる。ブレーキ操作量に対する制動力目標値の応答遅れを、ブレーキ操作量の増加側では小さく、ブレーキ操作量の減少側では大きくすることができ、各ローパスフィルタのカットオフ周波数(時定数)を調整するという簡単な構成で、運転者に違和感の無いブレーキフィーリングを与えることができる。
(もっと読む)
ハイブリッド電気自動車の走行制御装置
【課題】エンジン及び電動機を併用した車両減速中においてプレシフト時のトルク抜けに起因する空走感を未然に防止でき、もって走行フィーリングを向上できるハイブリッド電気自動車の走行制御装置を提供する。
【解決手段】例えば奇数歯車機構G1を第5速とした車両減速中には、この第5速を介してエンジンブレーキが駆動輪側に伝達されると共に、電動機の回生トルクが偶数歯車機構G2の第6速を介して駆動輪側に伝達されており、偶数歯車機構G2を第6速から第4速にプレシフトする際には電動機の回生トルクを低下させて一時的に正側に反転させる。そして、この回生トルクの低下と略同期するように駐車ブレーキを作動させて変速機の出力軸に制動力を作用させ、これによりプレシフト中に一時的に低下する回生トルクを補償する。
(もっと読む)
電動車両のブレーキ制御装置
【課題】回生協調ブレーキ制御時、マスターシリンダ圧発生開始ポイントのメカバラツキ影響を排除した制動目標値を設定することにより、良好なブレーキフィーリングと回生エネルギーの確保を達成すること。
【解決手段】ハイブリッド車のブレーキ制御装置は、マスターシリンダ13と、ホイールシリンダ4FL,4FR,4RL,4RRと、VDCブレーキ液圧ユニット2と、モータコントローラ8と、統合コントローラ9と、を備える。統合コントローラ9は、ブレーキ操作時、目標減速度を基本液圧分と上乗せ制動分(回生分と加圧分)で達成する回生協調ブレーキ制御を行う。そして、ブレーキ操作によりマスターシリンダ圧の発生が開始されるブレーキペダルストローク位置を検出し、検出された実マスターシリンダ圧発生開始ポイントでの目標減速度が、上乗せ制動分の最大値(回生ギャップ)になるように、ストローク変化に対して滑らかに変化する目標減速度特性を設定する(図4)。
(もっと読む)
ハイブリッド自動車
【課題】駆動軸の回転数に急変が生じるものとしても、二次電池が過大な電力により充放電するのを抑制する。
【解決手段】低μ路の路面上を走行するなどアクセルペダルの踏み込みにより駆動輪にスリップが生じその後アクセルペダルの踏み込みを維持しながらブレーキペダルの踏み込みによりスリップしている駆動輪をグリップさせた両踏みグリップ状態を判定し、両踏みグリップ状態でないときには要求パワーPeをエンジンから効率良く出力するための目標運転ポイントでエンジンを運転すると共に要求トルクを駆動軸に出力するために設定されたモータMG1のトルク指令Tm1*を実行トルクT1*に設定してモータMG1を駆動制御し、両踏みグリップ状態であるときには実行トルクT1*に値0を設定することによりモータMG1のトルクを制限する。
(もっと読む)
1 - 20 / 484
[ Back to top ]