
Fターム[5H115RB02]の内容
車両の電気的な推進・制動 (204,712) | 走行用電動機の制御 (3,810) | ノッチ(離散的入力)を用いるもの (20)
Fターム[5H115RB02]の下位に属するFターム
止めノッチ制御を行うもの
ノッチオフ制御を行うもの (1)
ノッチを自動的に切り換えるもの (6)
Fターム[5H115RB02]に分類される特許
1 - 13 / 13
電気車制御装置
【課題】インバータ周波数で発生するトルクリップルに起因する騒音を抑制する。
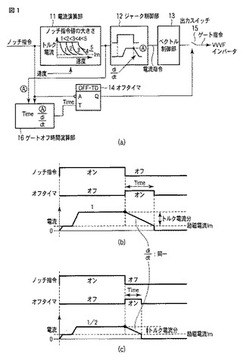
【解決手段】実施形態に係る制御装置は、電気車の主電動機を駆動する可変電圧可変周波数インバータ(VVVFインバータ)を制御する電気車制御装置であって、運転台からのノッチ指令値及び現在の速度に基づいて、前記インバータの第1電流指令値を演算する電流演算部11と、ノッチ指令0が入力された時、前記第1電流指令値を一定の傾きで減少させ、第2電流指令値を提供する電流制御部12と、前記電流制御部12からの前記第2電流指令値に基づいて、インバータゲート指令を生成するベクトル制御部13と、前記ノッチ指令0が入力された時、前記第1電流指令値又は前記インバータの出力電流実際値に基づいて、前記インバータへのゲート指令をオフするまでの時間を演算するオフ時間演算部16と、前記ノッチ指令0が入力された時から、前記オフ時間演算部にて演算された時間経過後、前記インバータへのゲート指令をオフする時間計測部14とを具備する。
(もっと読む)
定速走行制御装置

【課題】定速走行制御装置では、手動運転における支援的な機能の場合、取り扱いによっては、手動運転と定速走行制御装置における自動制御を切り替える操作が発生するため、車両駆動制御装置の手動運転向けノッチ曲線を、ATO向けに切り替えずに用いて制御する必要がある。
【解決手段】定速走行制御装置において、目標速度204を複数の速度帯304に分割し、車両駆動制御装置の各ノッチの速度−引張力曲線301と、走行抵抗曲線302の交点303に基づいてそれらの速度帯304を設定し、その速度帯1〜5ごとにノッチを算出する制御計算を設定して制御に用いることで、目標速度204に追随して一定の速度で走行できる。
(もっと読む)
列車制御装置
【課題】自列車の位置を正確に検出できない路線においても、勾配のある区間で速度を目標速度バンド内に精度よく保って走行する。
【解決手段】本発明の一実施例に係る列車制御装置は、現在の列車速度をサンプリングして、加減速度を演算する加減速度演算部15と、前記加減速度及びノッチ特性に基づいて、走行路の勾配抵抗を求め、前記勾配抵抗及びノッチ特性を用いて所定時間後の列車速度を予測する速度予測部17と、所定時間後の列車速度が速度追従バンド内に収まるよう、ノッチ指令を決定するノッチ指令決定部18とを具備する。
(もっと読む)
主幹制御装置
【課題】故障を検知して安全運行を継続できる主幹制御装置を提供する。
【解決手段】複数系統の制御部12a、12bを備えた主幹制御装置であって、複数系統の制御部の各々は、主ハンドル1の回転角を検出するロータリエンコーダ4からの信号と、逆転ハンドル5のセンサ8からの信号とを演算する演算部33aと、主ハンドルの回転角を検出するロータリエンコーダからの信号と、逆転ハンドルのセンサからの信号とに基づき故障診断を行う診断部34aと、演算部の演算結果と診断部の診断結果とが一致するかどうかを判定する励振判定部35aとを備え、励振判定部において一致しないことが判定された場合に、自系統の制御部の故障と判断して出力を遮断するとともに、他の系統の制御部による制御に切り換える。
(もっと読む)
運転支援システムおよび運転支援方法
【課題】定速運転時の乗り心地を改善させる。
【解決手段】車両速度9Dが所定の値に達すると定速運転指令8Dを出力する高速運転支援装置11と、一または複数の車両に搭載され、定速運転指令8Dに基づいて各車両の電動機10のトルクを制御する車両制御装置9と、高速運転支援装置11から送信された定速運転指令8Dを受信する列車情報管理装置8とを備え、列車情報管理装置8は、各車両制御装置9に一括して定速運転指令8Dを送信する。
(もっと読む)
減速度比推定装置を有する列車制御装置
【課題】列車の減速動作中に実際の車両特性を計測し、この実際の車両特性に基づいて減速動作を制御し、列車を停止目標位置に精度よく停止させる。
【解決手段】車両特性保持手段4は、ブレーキ指令値に対応する標準減速度を車両特性データとして保持する。減速度比推定手段7は減速度算出手段6にて算出された減速度と、車両特性保持手段4にて保持された標準減速度との比を示す減速度比を算出する。制御指令算出手段8は、前記減速度比算出手段にて算出された減速度比を用いて、前記車両特性データを更新し、列車速度及び位置と前記更新された車両特性データに基づいてブレーキ装置へのブレーキノッチ指令値を算出する。
(もっと読む)
過走防護パターン追従機能を備えた自動列車運転装置
【課題】過走防護パターンの速度より低い速度で安全に列車を停止させると共に、運行遅れを生じない列車自動運転を実現する。
【解決手段】ATO部11は、OPRトリガ信号に応答してOPRパターンを算出し、該ORPパターンより低い目標減速パターンを生成し(ステップS208)、前記目標減速パターンに従って列車が走行して停止するように制動指令を出力する(ステップS209、S210)。
(もっと読む)
列車制御装置
【課題】ブレーキ力のばらつきが大きい場合にも、減速度推定の誤差を小さくして、列車を所定時刻に、所定位置に正確に停止させる。
【解決手段】緩解後の再減速開始時などに、一定時間、所定のブレーキをかけて、列車9を減速させながら、減速度を推定した後、推定結果に応じたノッチ指示(自動ブレーキ力指令)をブレーキ制御器12に供給して、ブレーキ装置13を動作させ、列車9を指定された時刻、指定された位置に停止させる。
(もっと読む)
電気車制御シミュレータ及びプログラム
【課題】ハイブリッド型の電気車の制御シミュレーションを実現すること。
【解決手段】仮想鉄道車両のパラメータノッチが「5N」又は「4N」の高ノッチである場合において、走行速度が第1臨界速度Vθ1未満である場合は、バッテリのSOCに応じて、「MAXモード」と、「OPTモード」と、「SIVモード」とを切り替えながら仮想発電機の発電制御を行う。一方、走行速度が第1臨界速度Vθ1以上である場合は、常に「MAXモード」による発電制御を行い、不足電力は仮想バッテリから補うように模擬される。
(もっと読む)
定速走行制御方法及び制御装置
【課題】列車の定速走行時における高効率な運転制御を実現すること。
【解決手段】定速走行時、各車両1に備えられた制御装置30は、現在の走行速度Viと目標速度V*との速度差ΔV及び加速度αに基づいて稼動する主変換装置20の稼動台数Niを決定し、決定した稼働台数Niを基に自主変換装置20が稼動対象であるか否かを判断する。自主変換装置20が稼動対象ならば自主変換装置20を稼動し、稼動対象でないならば停止させる。またこのとき、主変換装置20は、主電動機10及び主変換装置20の総合効率が最も高い状態となるよう、自主変換装置20を稼動させる。
(もっと読む)
鉄道車両のブレーキ制御装置
【課題】 乗り心地の向上を図る。
【解決手段】 鉄道車両の目標減速度を設定する目標減速度設定手段1と、鉄道車両の速度を検出する速度検出手段4と、この速度検出手段4により所定の時間間隔で検出された速度の速度差から実減速度を演算する実減速度演算手段5と、目標減速度と実減速度とに差があるときには実減速度を目標減速度に合わせるブレーキ力補正率を演算するブレーキ力補正率演算手段6と、目標減速度に対応したブレーキ力とブレーキ力補正率に対応したブレーキ力とを加算したブレーキ力をブレーキ力発生手段3に指令するブレーキ力指令手段2とを備えたものである。
(もっと読む)
車両定位置停止自動制御装置および車両運転支援装置。
【課題】 ブレーキ減速度の増加特性がある場合でも精度良く停止位置誤差を予測でき、停止精度を確保することである。
【解決手段】 減速度推定手段12は、現在速度およびブレーキノッチの変化情報に基づいて減速度を推定するとともに、各ブレーキノッチの減速度増加特性に対する推定した減速度の比である減速度比率を演算し、平均減速度演算手段13は、ブレーキ特性データと減速度比率に基づいて各ブレーキノッチで停止まで減速した場合の平均減速度を求める。停止位置誤差演算手段8は、車両の状態データおよび平均減速度に基づいて、現在のブレーキノッチから別のブレーキノッチに切り換えた時の停止位置誤差の予測値を演算し、ブレーキ制御指令決定手段9でブレーキ制御指令を決定し、ブレーキ制御指令出力手段10からブレーキ装置に11に出力する。
(もっと読む)
空転滑走検知手段を備えたインバータ制御車両の制御装置
【課題】 速度センサを用いずにインバータをベクトル制御する電気車において、空転検知、滑走検知および再粘着検知をより正確に行う。
【解決手段】 車両駆動用電動機3を駆動するインバータ2と、インバータ2の出力電流を検出する電流検出手段6と、電流検出手段6により検出された電流検出値を座標変換により交流量から直流量Idf,Iqfに変換する座標変換手段7と、電流検出値を直流量に変換したものIdf,Iqfに対する電流指令値Idp,Iqpを生成する電流指令生成手段4と、電流指令値Idp,Iqpおよび前記電流検出値Idf,Iqfから電動機3の回転速度推定値Frcを演算する速度推定手段8と、インバータ2を電流指令値Idp,Iqpおよび電動機3の回転速度推定値Frcに基づきベクトル制御するベクトル制御手段9とを備え、電流指令値Iqpと電流検出値Iqfの偏差を積分した電流偏差積分値により空転検知または滑走検知もしくは再粘着検知を行う空転滑走検知手段10を備える。
(もっと読む)
1 - 13 / 13
[ Back to top ]