
Fターム[5H115RB07]の内容
車両の電気的な推進・制動 (204,712) | 走行用電動機の制御 (3,810) | ガソリン自動車の特性で制御するもの (20)
Fターム[5H115RB07]に分類される特許
1 - 20 / 20
ハイブリッド車両
【課題】気筒間空燃比ばらつき異常の検出精度を確保する。
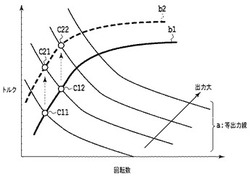
【解決手段】多気筒内燃機関および電動機と、内燃機関の気筒間空燃比ばらつき異常を検出する検出手段と、車両を内燃機関および電動機の両方で駆動させるハイブリッド(HV)モードおよび車両を内燃機関のみで駆動させるエンジンモードを実行可能な制御手段とを備える。制御手段は、HVモードのとき所定の動作線b1上を内燃機関の実際の動作点c11が移動するよう内燃機関および電動機を制御し、HVモード実行中に所定の変更要求があったとき動作線をb2に変更してエンジンモードに移行し、且つHVモード実行中にばらつき異常検出が未実行または実行中であるとき動作線の変更およびエンジンモードへの移行を禁止してハイブリッドモードを維持する。
(もっと読む)
ハイブリッド自動車

【課題】加速要求に迅速に対応する。
【解決手段】高電圧系の電圧VHが要求トルクTr*が閾値Tref以上であるときより低い昇圧上限値Vlim(電圧Vlo)の範囲内で要求トルクTr*に基づいて設定される電圧指令VH*になるよう昇圧回路55を制御している最中に要求トルクTr*が閾値Tref以上になったときには(ステップS170)、高電圧系の電圧VHが昇圧上限値Vlim(電圧Vhi)の範囲内で要求トルクTr*に基づいて設定される電圧指令VH*になるよう昇圧回路55を制御する(ステップS200,S230)と共にエンジン22を応答性よく運転しながら要求トルクTr*に基づくトルクにより走行するようエンジン22やモータMG1,MG2を制御する(ステップS220,S240)ことにより、加速要求により迅速に対応することができる。
(もっと読む)
ハイブリッド車両の発電制御装置
【課題】エンジンとモータとを駆動力源とするハイブリッド車両のエンジン駆動力を用いた発電において,高効率な発電を優先的に行いつつ,蓄電量を速やかに回復する。
【解決手段】エンジンとモータとを駆動力源とするハイブリッド車両において,蓄電装置が所定の要充電状態にあるとき,アクセルON時にエンジン駆動力の余剰分を用いた発電が行われる。この際に,目標蓄電量と実蓄電量との差分および差分の時間変化に応じて,発電を許可する閾値である発電許可下限効率の値を変更し(S506),発電許可下限効率以下の効率での発電を禁止する(S512)。これにより,いかなる走行条件においても,高効率な発電を優先的に行いつつ,蓄電量不足に陥ることなく,蓄電量を速やかに回復可能にする。
(もっと読む)
エンジン停止制御装置
【課題】エンジン始動時のショックを低減する。
【解決手段】エンジン10のクランクケース20内のガスをエンジン吸気系に循環するガス循環系に設けられ、クランクケース20内のガスのエンジンシリンダ12への循環量を制御する制御バルブ40を有する。エンジン停止処理におけるエンジンの停止に先立ち、PCVバルブ40を閉じ、停止前エンジン10へのクランクケース20内ガスの循環を停止することで、エンジンシリンダ内への給気量を減少させる。
(もっと読む)
ハイブリッド車両制御装置
【課題】複数の動力源を備えるハイブリッド車両において、バッテリ効率を向上する。
【解決手段】ドライバーの要求駆動力に基づき、モータの駆動力のみで走行するモータ走行モードの出力効率と、エンジン出力によりモータ発電を行いつつエンジンの駆動力で走行を行う発電走行モードの出力効率とをそれぞれ算出して比較する(S20)。効率の良い走行モードを選択する(S21およびS22)ことで、適切な走行モードを選択できる。モータ走行モードの出力効率を算出する場合、バッテリの充電に要した燃料消費に基づくエネルギー変換効率を考慮して効率を算出する。また、発電走行モードの出力効率を算出する場合、ドライバーの要求駆動力と要求発電量とに基づいて効率を算出する。
(もっと読む)
エンジン回転数算出装置及びエンジン音生成装置
【課題】車両走行速度と仮想的エンジンの回転数が比例関係にないと想定される場合であっても、実際のエンジン音に近い自然な音を発生することができるエンジン回転数算出装置及びエンジン音生成装置を提供する。
【解決手段】アクセル開度に依存しかつ車速に依存しない仮想的エンジンの回転数を記憶する記憶手段を備え、車両走行速度と仮想的エンジンの回転数が比例関係にないと想定される場合には、検出したアクセル開度に基づき記憶手段から仮想的エンジンの回転数を取得する。
(もっと読む)
車両用駆動制御装置
【課題】前輪のスリップを適切に判定し、適切に四輪駆動走行を行うことである。
【解決手段】車両用駆動制御装置は、車両重量及び車両に外部から作用する力のうちの少なくとも一方を検出するロールバック判定部51及び走行抵抗値設定部52と、検出した車両重量及び車両に外部から作用する力のうちの少なくとも一方を基に、車両速度推定手段が推定する車両速度を補正する推定車速補正部53とを備える。
(もっと読む)
車両の制御装置および制御方法
【課題】回転電機を動力源として備える車両において、回転電機の駆動回路を作動させるための電力を低減する。
【解決手段】モータを動力源として備える車両において、ECUは、シフトポジションSPが走行ポジションであり(S100にてYES)、かつ停車中であり(S102にてYES)、かつクリープカット条件が成立しており(S104にてYES)、かつモータのトルク(MG(2)トルク)が略零であり(S106にてYES)、かつブレーキ踏力Fbがしきい値f1を超えていると(S108にてYES)、クリープカットに伴なうモータのシャットダウンを実行するように、モータの駆動回路であるインバータにシャットダウン指令を出力する。これにより、インバータのスイッチング動作が停止される。
(もっと読む)
車両およびその制御方法
【課題】クリープトルクを出力して停車しているときに運転者が運転席から離れるのを抑制する。
【解決手段】クリープトルクにより車両の進行方向に作用する力と車両の自重により車両の進行方向とは逆向きに作用する力とが釣り合うことにより車両が停車する釣り合い停車状態で運転席のドアが開かれたときには運転者に釣り合い停車状態である旨の警告を行なう(ステップS110〜S140,S170,S190)。また、釣り合い停車状態のときに運転席のドアが閉じたままであっても釣り合い停車状態が所定時間だけ継続したときにも同様に警告を行なう(ステップS110〜S140,S170〜S190)。これにより、釣り合い停車状態のときに運転者が運転席を離れるのを抑制することができる。
(もっと読む)
並列タイプのハイブリッド自動車において、ハイブリッド運転時の負荷ポイントをシフトするための方法
本発明は、内燃エンジンと、少なくとも一つの電気機械と、エネルギ貯蔵部と、を有する並列タイプのハイブリッド自動車において、ハイブリッド運転時の負荷ポイントをシフトするための方法に関する。内燃エンジンの特定(一定)の(エネルギ)消費の特性マップにおいて、少なくとも一つの限界曲線(A1,B1、C1、D1)が規定され、自動車のエネルギ貯蔵部のために、エネルギ充電状態のための少なくとも一つの限界値(A2,B2、C2、D2)が規定される。ここで、負荷ポイントシフトモード(A、B、C、D)が規定される。その際には、内燃エンジンの特定の消費及びエネルギ貯蔵部のエネルギ容量が、所定の限界曲線(A1,B1、C1、D1)ないし所定の限界値(A2,B2、C2、D2)を超えない。負荷ポイントのシフトは、負荷ポイントシフトモード(A、B、C、D)のいずれかで、あるいは、複数の負荷ポイントシフトモード(A、B、C、D)のいずれかの組み合わせで、行われる。  (もっと読む)
(もっと読む)
車両用動力伝達装置の制御装置
【課題】内燃機関と電動機とを備える車両において、その内燃機関に供給される燃料の種類が変更された場合にその燃料の種類に応じた良好な燃費性能を得ることができる制御装置を提供する。
【解決手段】変速機構10の有段制御領域と無段制御領域とを分ける境界値である判定車速V1および判定出力トルクT1が、エタノールの混合率が高いほど、より小さくするように変更されるので、そのエタノールの混合率に応じて第1電動機M1が運転されるか否かが決定され、そのエタノールの混合率に応じた良好な燃費性能を得ることができる。
(もっと読む)
動力発生源制御装置
【課題】一層、ハイブリッド車両の燃費を向上させることができる動力発生源制御装置を提供する。
【解決手段】走行中に車軸が要求する要求駆動パワーから実発電電費および実アシスト電費を設定する(S1302、S1303)。また、車両の現在位置から、予定走行経路を複数の区間に分割して設定した発電電費閾値およびアシスト電費閾値を選択する(S1304)。そして、これら実発電電費、実アシスト電費、発電電費閾値、アシスト電費閾値から、発電走行による電費改善量とアシスト走行による電費改善量を算出して、2つの改善量のうち値の大きいものに基づいて、電源系が要求すべき電力授受量を決定する(S1305)。このようにして決定した電力授受量に基づいてエンジン、モータジェネレータを制御することにより、発電走行、アシスト走行のタイミングがより適切となる。従って、従来よりもハイブリッド車両の燃費を向上させすることができる。
(もっと読む)
4つの駆動輪を含むタイプのハイブリッド車両の制御および監視の方法および装置
本発明は、駆動熱機関(20)と、指令に応じて駆動モータとして動作することができ、バッテリ(26)から給電される電気機械(22)とを備えるハイブリッド車両の制御および監視方法であって、車両の動作状態を検出すること、および、それに応答して、熱機関(20)の特定の指令を要求することなく、車両の安定性上の制約条件および車両の電気装置の保護上の制約条件の遵守を確保しながら、電気機械(22)のみに動作命令を送ることから成ることを特徴とする制御および監視方法に関する。 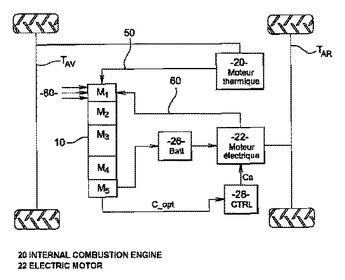 (もっと読む)
(もっと読む)
ハイブリッド車両の発進制御装置
【課題】 アクセル踏み込み待機からのパワーオン発進時、発進開始からの高いトルクダウン応答による有効なクラッチ発熱の低減によりクラッチ保護を達成することができるハイブリッド車両の発進制御装置を提供すること。
【解決手段】 少なくともエンジンE、モータジェネレータMG、第2クラッチCL2、駆動輪RR,RLの順に接続してハイブリッド駆動系を構成したハイブリッド車両において、ドライバのアクセル踏み込み操作による待機状態からの発進時、前記第2クラッチCL2への入力トルクを前記モータジェネレータMGに対するトルク制御により絞り、かつ、前記第2クラッチCL2を滑り締結させることで駆動力を出すパワーオン発進制御手段を設けた。
(もっと読む)
車両用ハイブリッド駆動装置
【課題】 第1クラッチが故障した場合でもモータジェネレータによるエンジン始動を確保することができると共に、大きなクラッチ動作エネルギーを要さずにエンジン始動時に必要な締結レスポンスを確保することができる車両用ハイブリッド駆動装置を提供すること。
【解決手段】 エンジンEとモータジェネレータMGとの間に第1クラッチCL1を介装し、前記第1クラッチCL1を締結し、前記モータジェネレータMGをスタータモータとして前記エンジンEを始動する車両用ハイブリッド駆動装置において、前記第1クラッチCL1は、前記エンジンEと前記モータジェネレータMGとの間に並列に介装したノーマルオープンクラッチCL1oとノーマルクローズクラッチCL1cとを有する手段とした。
(もっと読む)
車両用駆動制御装置
【課題】運転者の加速要求があるのに車両が加速しない高負荷時に、電動機の駆動力を増加させて車両を加速させる。
【解決手段】4輪駆動状態で走行しているときに(ステップS1の判定が“Yes”)、時点t1から運転者の加速要求があるのに(ステップS3又はS4の判定が“Yes”)、車両が加速しない高負荷状態を検知したら(ステップS5の判定が“No”)、一旦、時点t2でエンジン2に対するジェネレータ7の発電負荷を制限し、その値を徐々に減少させる(ステップS9)。そして、ジェネレータ7の発電負荷を減少させてから、エンジン回転数Neの上昇に伴って前輪が所定量以上加速したときに(ステップS11の“No”)、発電負荷を減少させる前よりもエンジントルクTeが上昇したと判断して発電負荷の減少方向への制御を解除する(ステップS2)。
(もっと読む)
ハイブリッド車両の内燃機関制御装置及び方法
【課題】 ハイブリッド車両において内燃機関を効率良く動作させる。
【解決手段】 ハイブリッドシステム10において、制御装置100のトルク算出部100bはモータジェネレータMG1のトルク反力からエンジン200のトルクを算出することが可能に構成されている。また、燃費率算出部100cは、係る算出されたエンジントルクと、燃料噴射量及びエンジン回転数とに基づいて、エンジン200における瞬間的な燃料消費率を算出することが可能に構成されている。動作線更新部100dは、この算出された燃料消費率に基づいた動作点学習処理を実行することによって、エンジン200の動作点を燃料消費率が最小となる点に設定する。
(もっと読む)
トルク変動と温度を限定してエンジンをリーン運転する車輌
【課題】エンジンをリーン運転することにより未燃成分の排出を抑制することができるが、エンジン暖機が不十分でリーン運転されると却って未燃成分の排出量が増大する恐れがあることを考慮して、エンジンをリーン運転することによる未燃成分排出抑制効果を最大限に高める車輌を提供する。
【解決手段】エンジンの温度がエンジンをリーン運転してもエンジンの出力トルクの変動が所定の限度を越えない温度以上であるときエンジンをリーン運転する。
(もっと読む)
ハイブリッド車およびその制御方法
【課題】 車両のエネルギ効率を向上させる
【解決手段】 モータ走行を行なっている最中にモータが高温状態に至ったときには、車速Vが閾値Vref以下である条件と路面勾配θが閾値θref以上である条件とが成立した場合には、エンジンが停止している場合はエンジン22を始動し(S116)、エンジンを効率よく運転できる範囲の下限以上の動力がエンジンから出力されるようにバッテリの充電要求Pb*を再設定すると共に、この充電要求Pb*を用いて要求パワーPe*を再設定し(S118,S120)、この要求パワーPe*を用いてエンジンやモータを制御する(S122〜S128)。これにより、効率よく運転できる範囲の動力を出力するようエンジンを運転することができ、過剰な動力を電力としてバッテリに充電することができる。この結果、車両のエネルギ効率を向上させることができる。
(もっと読む)
車輌の駆動力制御装置
【課題】登坂中に前輪がトラクション制御される場合に於ける前輪及び後輪の駆動力を適正に制御することにより、登坂中に前輪がトラクション制御される場合の車輌の安定性及び走行性を従来に比して向上させる。
【解決手段】前輪用駆動装置(10)と、後輪用駆動装置(28)と、車輪の駆動スリップ率が過大であるときにはトラクション制御を行うトラクション制御装置(26、36)とを有し、前輪用駆動装置及び後輪用駆動装置の一方を主駆動装置とし他方を副駆動装置とする車輌の駆動力制御装置であって、登坂中に前輪がトラクション制御されているときには(S50、80)、後輪の駆動トルクが前輪の駆動トルクを越えない範囲にてできるだけ高い値になるよう後輪用駆動装置の駆動力を制御する(S90、150、160)。
(もっと読む)
1 - 20 / 20
[ Back to top ]