
Fターム[5H115SJ14]の内容
車両の電気的な推進・制動 (204,712) | 設定手段 (480) | 車両の内部に設定手段があるもの (322) | 前後進指令 (16)
Fターム[5H115SJ14]に分類される特許
1 - 16 / 16
電動車両の制御装置
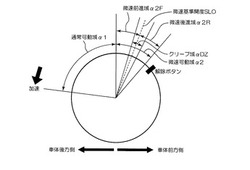
【課題】車速を調整するアクセル機構に車両の前進および後進の両方の機能を持たせて操作性を容易にすることができる電動車両の制御装置を提供する。
【解決手段】通常可動域α1と微速可動域α2とでアクセル操作を可能にする。非アクセル操作時にスロットル開度を最小開度側に戻すスロットルバネを有する。スロットル開度に応じてモータを駆動する駆動部を有する。スロットルバネは微速可動域α2の中間位置である微速基準開度SL0までアクセルグリップを付勢してスロットル開度を小さくする。微速可動域α2では、微速基準開度SL0を基準にスロットル開度が大きい領域α2Fでは電動車両を微小車速で前進させる一方、微速基準開度SL0を基準にスロットル開度が小さい領域α2Rでは電動車両を予定の微小車速で後進させるように駆動部にモータ駆動指令を供給する微速制御部を備える。
(もっと読む)
主幹制御装置

【課題】故障を検知して安全運行を継続できる主幹制御装置を提供する。
【解決手段】複数系統の制御部12a、12bを備えた主幹制御装置であって、複数系統の制御部の各々は、主ハンドル1の回転角を検出するロータリエンコーダ4からの信号と、逆転ハンドル5のセンサ8からの信号とを演算する演算部33aと、主ハンドルの回転角を検出するロータリエンコーダからの信号と、逆転ハンドルのセンサからの信号とに基づき故障診断を行う診断部34aと、演算部の演算結果と診断部の診断結果とが一致するかどうかを判定する励振判定部35aとを備え、励振判定部において一致しないことが判定された場合に、自系統の制御部の故障と判断して出力を遮断するとともに、他の系統の制御部による制御に切り換える。
(もっと読む)
移動体、及びその制御方法
【課題】高い操作性を有する移動体、及びその制御方法を提供する。
【解決手段】本発明の一態様にかかる移動体1は、搭乗者の体重移動に応じて移動する移動体であって、搭乗者の大腿部の下方が空間となる座面を有する搭乗席8と、搭乗席8を支持する車台13と、車台13を移動させる車輪6と、搭乗席8の座面8aに加わる力に応じた計測値を出力する力センサ9と、力センサ9からの出力に応じて、車輪6を駆動するための指令値を算出する制御計算部51と、を備えたものである。
(もっと読む)
移動体、及びその制御方法
【課題】高い操作性を有する移動体、及びその制御方法を提供する。
【解決手段】本発明の一態様にかかる移動体1は、搭乗者が搭乗する搭乗席8と、搭乗席8を支持する車台13と、車台13を移動させる車輪6と、搭乗席の座面に加わる力に応じて、ヨー軸周りのモーメント、ピッチ軸周りのモーメント、及びロール軸周りのモーメントに対応する計測信号を出力するセンサと、ピッチ軸周りのモーメントに基づいて、並進成分を算出する並進成分算出部55と、ロール軸周りのモーメントに基づいて、旋回成分を算出する旋回成分算出部54と、ヨー軸周りのモーメントに基づいて、その場旋回成分を算出するその場旋回成分算出部56と、並進成分と旋回成分とその場旋回成分とを合成して、移動機構を駆動するための指令値を算出する合成部57、を備えるものである。
(もっと読む)
電気自動車の走行状態切換装置
【課題】 イグニッションスイッチをオフにすると切換レバーが中立位置となる電気自動車の走行状態切換装置を提供すること。
【解決手段】 中立位置を含む複数位置を切り換える切換レバーと、前記切換レバーの位置を電磁的に保持する保持手段と、前記切換レバーを中立位置に機械的に付勢する付勢手段と、前記保持手段の電磁石と電源との間に設けたイグニッションスイッチとを設けた。
(もっと読む)
車両
【課題】路面勾(こう)配を推定するとともに、推定値をその時間変化率に基づいて予測した未来の時刻における値に補正することによって、路面勾配が急激に変化しても、車体の姿勢や車両の走行状態を安定に保つことができ、より安全に、かつ、より快適に走行することができるようにする。
【解決手段】車体と、前記車体に回転可能に取り付けられた駆動輪12と、該駆動輪12に付与する駆動トルクを制御して前記車体の姿勢を制御する車両制御装置とを有し、該車両制御装置は、前記車体の姿勢に基づき、路面勾配を推定するとともに、該路面勾配の推定値を、該推定値の時間変化率に基づいて補正する。
(もっと読む)
車輌制御装置
【課題】倒立制御車輌において常に同じ制動、発進、加減速タイミング、或いは制動、発進、加減速フィーリングでの車輌操作を可能とする車輌制御装置を提供する。
【解決手段】本発明は、倒立制御車輌の車体傾斜角の角速度の制御を行う車輌制御装置であって、目標姿勢角を算出する目標姿勢角算出手段(ステップS305)と、目標姿勢角に応じた標準移動時間tCを算出する標準移動時間算出手段(ステップS306)と、目標姿勢角と現在の姿勢角との角度差ΔθCを算出する角度差算出手段(ステップS307)と、車体傾斜角速度[θ1*]を [θ1*]=ΔθC/tCによって算出する車体傾斜角速度算出手段(ステップS308)と、を有することを特徴とする。
(もっと読む)
倒立車輪型移動体、及びその制御方法
【課題】安全性を向上することができる倒立車両型移動体、及びその制御方法を提供する。
【解決手段】本発明の一態様にかかる倒立車輪型移動体は、右駆動輪18、左駆動輪20を回転駆動するモータ34、36と、スイングアーム17、19を介してマウント26、28に対して回動可能に支持された搭乗席74と、搭乗席74を駆動するスライド機構68と、を備えている。制御部80は、モータ34.36又はスライド機構68の駆動力に基づいて、車体部77の重量を検知する。そして、車体部の重量がしきい値を越えた時、又はスライド機構68の駆動範囲の端に到達した時に、車体部を低くする。スライド機構の駆動力がしきい値を越えておらず、かつスライド機構68がスライドエンドに到達していない時に、倒立させつつ移動するように制御する。
(もっと読む)
ハイブリッド車およびその制御方法
【課題】リバース走行時にエンジンを始動する際により確実に要求動力を出力する。
【解決手段】遊星歯車機構のサンギヤ,キャリア,リングギヤにそれぞれ第1モータ,エンジン,駆動軸および第2モータが接続されたハイブリッド車において、リバース走行時には、車速Vに基づいて第1モータでエンジンをモータリングして始動するのに必要な始動用パワーPsを設定すると共にバッテリの出力制限Woutから始動用パワーPsを減じたものを閾値Prefに設定し(S140,S150)、駆動軸に要求される要求パワーPr*が閾値Pref以上となったときにエンジンをモータリングして始動する(S200〜S240)。要求パワーPr*の出力に必要な電力とエンジンの始動に必要な電力とをバッテリから出力できなくなる段階でエンジンを始動するから、エンジンの始動の際に要求パワーPr*に対応できなくなるのを抑制できる。
(もっと読む)
車両および駆動装置並びに車両の制御方法
【課題】エンジンからの前進走行用の動力とモータから変速機を介して出力される動力とを用いて走行する車両において、変速機をダウンシフトしている最中にシフトポジションがドライブポジションからリバースポジションに変更されたときに、より確実に後進走行する。
【解決手段】ダウンシフトが行なわれている最中にシフトポジションがリバースポジションに変更されたときには(S170,S180)、ダウンシフトが完了するまでエンジンを自立運転すると共に要求トルクTr*に基づくトルク指令Tm2*でモータを制御する(S190,S240)。これにより、ダウンシフトの最中にリバースポジションに変更されたときに、エンジンから車軸に出力される前進走行用のトルクがモータから変速機を介して車軸に出力される後進走行用のトルクよりも大きくなるのを抑制することができ、より確実に後進走行することができる。
(もっと読む)
車両の駆動制御装置
【課題】車両走行時における車軸の回転変動を抑制し、ひいてはドライバビリティを良好に保つ。
【解決手段】車両10のフロント側には動力源としてのエンジン14が設けられ、リア側には動力源としての電動発電機32が設けられている。車両のリア側において、デフ連結軸34には、電動発電機32と空調用のコンプレッサ33とが動力分配装置31を介して機械的に連結されている。車輪連結軸とコンプレッサ連結軸との間にはこれらを連結又は遮断の状態に切り替える直結クラッチが設けられている。ハイブリッドECU52は、車両走行時においてコンプレッサ33の作動状態の変化、又は直結クラッチの連結/遮断の状態の変化に基づいて電動発電機32の駆動又は発電の状態を制御する。
(もっと読む)
電動車両の移動を選択的に抑止するためのシステムおよびその方法
本明細書は、所望の方向とは反対の方向へ電動車両が移動することを抑止するための方法およびシステムを説明する。電動車両は、この車両の少なくとも1つの車輪に連結された電気モータを含む。この方法は、所望の移動の方向を検出すること、所望の方向とは反対の方向への車両の移動を検出すること、望まない方向への車両の移動に反対作用するためにモータによって少なくとも1つの車輪に加えるべきトルクを計算すること、および電気モータを介して少なくとも1つの車輪に反対作用するトルクを加えることを含む。  (もっと読む)
(もっと読む)
走行装置及びその制御方法
【課題】 障害物の回避を良好に行うことができるようにする。
【解決手段】 各距離センサ301〜304、301s〜304sの出力が距離計測器320に供給され、この計測器320で計測された距離Ld、Ldsと、旋回レバー310からのレバー角度の信号が中央制御装置330に供給される。そして中央制御装置330では、ジャイロセンサ、加速度センサ等の姿勢センサ回路340の出力信号と共に演算によりモータ駆動制御信号が形成される。この駆動信号がモータ制御装置351、352に供給されてモータ361、362が駆動され、これらの駆動力が減速機371、372を介してタイヤ381、382に伝達される。また、モータ361、362には二次電池電源回路390からの電源電圧が供給されると共に、これらのモータ361、362で発生される回生電力が回生コンデンサ391に蓄えられる。
(もっと読む)
電動乗物用のAC駆動システム
【課題】実用的な乗物用の駆動システムを提供する。
【解決手段】この駆動システムは、駆動トルクを提供するための交流(AC)モータを含んでいる。ACモータコントローラは、電源電圧信号、スロットルペダル位置信号、ブレーキペダル位置信号、キースイッチ信号、前進/ニュートラル/後退(FNR)信号、および、実用的な乗物が駆動するように設定されているか、牽引されるように設定されているかを示す走行/牽引信号を受信する。ACモータコントローラは、ACモータのためのAC駆動信号を生成し、AC駆動信号は、電源電圧信号、スロットルペダル位置信号、ブレーキペダル位置信号、キースイッチ信号、FNR信号、および走行/牽引信号に基づいている。
(もっと読む)
車両用駆動装置の制御装置
【課題】 駆動装置を小型化できたり、或いは燃費が向上させられる車両用駆動装置を提供すると共に、車両減速走行時に燃費向上が図れる制御装置を提供する。
【解決手段】 切換クラッチC0或いは切換ブレーキB0を備えることで、変速機構10が無段変速状態と有段変速状態とに切り換えられて、電気的に変速比が変更させられる変速機の燃費改善効果と機械的に動力を伝達する歯車式伝動装置の高い伝達効率との両長所を兼ね備えた駆動装置が得られる。また、回生制御可否判定手段84により回生制動制御が可能と判定され、且つエンジン回転停止可否判定手段82によりエンジン回転停止が可能と判定されたときには、切換制御手段50により動力分配機構16が差動状態とされるので、回生効率最適制御手段86により第2電動機M2の回生効率と第1電動機M1の損失Lとに基づいて回生効率が最適となるように自動変速部20の変速比γが制御されて燃費向上が図れる。
(もっと読む)
電気自動車の制御装置
【課題】 車両状態によっては急発進加速可能な電気自動車の制御装置を提供する。
【解決手段】 アクセル開度に応じてトルク指令値を演算するトルク指令値演算手段(ステップS1〜S3)と、前記トルク指令値に応じて電動機の出力トルクを制御する電動機制御手段(12)と、急発進加速を必要とする車両状態を検出する車両状態検出手段(ステップS6)と、を備え、前記電動機制御手段(12)は、前記車両状態検出手段(ステップS6)により検出された車両状態が急発進加速を必要としない状態である場合にはトルク指令値に対して所定の遅延を生じさせて電動機3の出力トルクを制御し、検出された車両状態が急発進加速を必要とする場合にはトルク指令値に対して所定の遅延を生じさせることなく電動機3の出力トルクを制御するようにした。
(もっと読む)
1 - 16 / 16
[ Back to top ]