
Fターム[5H115SL03]の内容
車両の電気的な推進・制動 (204,712) | 伝送 (1,442) | 他列車間で伝送するもの (16)
Fターム[5H115SL03]に分類される特許
1 - 16 / 16
制御装置、通信制御装置及び列車制御装置、並びに列車制御システム
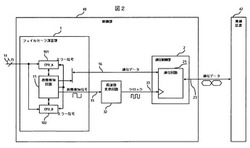
【課題】制御装置の故障検知時、通信回路が確実に回線から切断されるフェイルセーフな装置を簡易な構成により、実現する。
【解決手段】通信回路のボーレート生成用クロックとして、フェイルセーフ演算部の故障検知回路から出力される故障検知信号を使用し、演算部の故障検出時、誤出力等により通信先装置、システムに影響を与えないよう、故障検知信号を停止させることにより通信回路の動作を停止させ、装置を回線から切り離すように構成する。
(もっと読む)
車両用充放電管理システム

【課題】走行経路や車両の状態等に応じて電池の状態を適切に管理できる車両用充放電管理を提供する。
【解決手段】電池101に蓄えられた電力により走行する車両の走行経路と、前記車両及び/又は道路の状況とに応じて、前記電池101の充電量が所定の範囲内に収まるように、前記走行経路における前記電池101の充放電スケジュールを作成する充放電スケジュール作成手段15と、前記走行経路を複数の区間に区分し、前記区間ごとに、実際の充電量と、前記充放電スケジュールにおける充電量とを対比し、その対比結果に応じて、それ以降の区間における前記充放電スケジュールを修正する充放電スケジュール修正手段15と、を備える車両用充放電管理システム。
(もっと読む)
車両制御システム
【課題】車両間における制御を適切に実行させること。
【解決手段】他車の情報を車外から受信する通信装置20と、周辺の夫々の車両が共有する自車と他車の情報を用いて当該各車両間での走行制御を行う制御装置10と、を各車両に備える。そして、その制御装置には、実行中の前記走行制御に係る状況又は当該走行制御を実行中の車両の状況に応じて当該走行制御の制御形態を変更させること。例えば、その制御装置10には、走行制御の制御目標値と当該制御目標値での走行制御実行に伴う実測値とのずれに基づいて当該走行制御の制御形態を変更させる。
(もっと読む)
倒立振子型移動体
【課題】他の移動体との連携動作が可能な倒立振子型移動体を提供すること。
【解決手段】通信部701(情報取得手段)により、他移動体の現在の状態(姿勢)を表す状態情報を取得する。姿勢制御演算部80(移動制御手段)は、前記状態情報に基づき、前記他移動体の現在の状態(姿勢)に対する自移動体(倒立振子型移動体)の状態(姿勢)が前記自移動体と前記他移動体とを連携動作させるために規定された所定の条件を満たすように、前記自移動体の移動を制御する。
(もっと読む)
車上情報集約型の高度安全列車制御システム
【課題】 知能化した車上制御装置を搭載することにより、車上にて迅速にして的確な制御を実施することができる車上情報集約型の高度安全列車制御システムを提供する。
【解決手段】 車上情報集約型の高度安全列車制御システムは、線路内障害物情報を検知する線路内障害物検出装置4と、自らの列車状態を検知する自列車状態検知装置5と、線路沿線に関する情報を収集する線路沿線に関する情報収集装置6と、先行列車13からの情報を収集する先行列車からの情報収集装置7とを取り込み処理する車上制御装置3を搭載する後続列車2で構成される。前記線路内障害物情報と前記自列車状態情報と前記線路沿線に関する情報と先行列車13からの情報とを用いて前記後続列車2の車上制御装置3が主体となり高度な安全列車制御を行う。
(もっと読む)
電気車の無線保安用制御装置
【課題】一列車状態で走行中に二列車に切り離され夫々が同一路線を前後して走行しているとき、先行列車2が急停止してもこれに後続列車が衝突することを相対移動閉塞システムによって防止する。
【解決手段】各列車は、両列車間で無線通信する無線通信装置5及び相対移動保安システムを搭載した移動閉塞制御装置4を備える。後続列車3の限界停止点が常に先行列車2のそれの手前であるようにするため、先行列車2は自列車の停止限界点を後続列車3に送信し、これを受けた後続列車3の移動閉塞制御装置4はその受信した停止限界点に基づいて自列車用制限速度パターン7を生成する。或いは、先行列車が自列車の停止限界点に基づいて一方的に後続列車用制限速度パターン、または制限速度指令を生成してこれを後続列車に送信する。
(もっと読む)
列車制御システム
【課題】簡単に、その場その時に応じて効果的に、空転や滑走を防止する列車制御システムとする。
【解決手段】列車が走行するある区間において、先行列車Aが区間を抜ける際に、当該区間で空転を防止するために調整したトルク配分情報204を、後続列車Bに送信し、後続列車Bは、当該区間へ進入する時、先行列車Aから受信したトルク配分情報202を初期値として、トルク配分の調整を行う。同様に、後続列車Cが先行列車Bの制御を次々と引き継ぎ、継続する。
(もっと読む)
乗り心地改善型列車制御システム
【課題】朝ラッシュ等の列車密度が高い時間帯においても、列車の遅れを発生することなく、良好な乗り心地を実現する。
【解決手段】先行列車位置推定部12は、自列車位置検知部10により検知した自列車位置に基づき、制限速度情報保持部11に保持された情報から区間の始端位置と終端位置を検索して、自列車の在線区間を特定する。先行列車位置推定部12は、地上装置3からの制限速度と予告信号に基づき、制限速度情報保持部11に保持された情報を参照して、先行列車の位置情報を推定する。先行列車情報通知部13は、先行列車位置推定部12で推定した先行列車の位置情報を運転士4に通知する。
(もっと読む)
列車運行制御方法および車上制御装置
【課題】列車運行区間の特性,列車運行乱れ規模,多様な要求に応じ、適切に対応できる運行制御を可能にすること。
【解決手段】列車上に、ダイヤを記憶する装置,他列車の運行状況を獲得する装置,自列車の運行状況を獲得する装置,自列車の走行を決定する装置,自列車の走行を制御する装置,ダイヤを変更する装置,ダイヤの変更内容を受け取る装置,車上のダイヤに変更内容を反映する装置,ダイヤの変更内容を他列車に伝達する装置を備え、当初のダイヤに従う列車走行,列車間で列車間隔を調整する走行,ダイヤ変更後のダイヤに従う列車走行、を選択しながら列車の運行制御を行う。
(もっと読む)
列車制御信号の電文構造及び列車速度制御方法
【課題】先行列車位置や進路開通等により変化する変化情報を地上から列車に確実に伝送することができるとともに、線路改修等により固定情報が変更になった場合でも、簡単に固定情報を変更して容易に確認できるようにする。
【解決手段】列車制御信号の電文20を、先行列車の位置や進路開通等により変化する変化情報からなる必要最小列車制御電文21と、線路勾配や曲線半径等の列車間隔をより短くする上で有効な固定情報からなる最適列車制御電文22とで構成し、最適列車制御電文22を複数に分割し、必要最小列車制御電文21毎に分割した最適列車制御電文22とその識別情報を付加して列車に送信する。
(もっと読む)
ハイブリッド車の制御装置
【課題】回生期待量を迅速に算出することが可能なハイブリッド車の制御装置を提供する。
【解決手段】エンジンと、力行および発電可能な少なくとも一つの回転電機と、回転電機と電力の授受を行う蓄電装置と、を備えたハイブリッド車の制御装置において、自車速を取得する自車情報取得手段と、自車1の走行予定経路を決定する自車走行予定経路決定手段と、自車の走行予定経路であり、かつ自車の前方を現在走行している先行車1Aの先行車速情報および関連情報を、車車間通信または外部情報収集端末からの情報を受信することによって取得する先行車情報取得手段と、自車速と先行車速から算出された相対車速変化に基づいて回生期待量を算出し、回生期待量に基づいて蓄電装置の目標SOCを変更する目標値変更手段と、を備えている。
(もっと読む)
保守用車両の制御システム
【課題】非動力車両(第2保守用車両)においても衝突防止制御及び進出防止制御を行うことが可能になると共に、各保守用車両の情報を共有することで前記各保守用車両の乗員が前記情報を確認することができる。
【解決手段】保守用車両14a(動力車両)の無線通信部20から無線52を介して保守用車両14b(確認車両、非動力車両)の無線通信部20に該保守用車両14aの第1現在位置を送信し、保守用車両14bの距離検出部27は、前記第1現在位置に基づいて保守用車両14bの第2現在位置を検出する。これにより、速度センサ42及び車上子50等のセンサ類が搭載されていない保守用車両14bにおいても自車両に対する衝突防止制御や進出防止制御を行うことが可能となる。
(もっと読む)
二重系列車制御装置
【課題】二重系列車制御装置の両系統に監視機能つけることにより相互監視機能を有し、マスタとスレーブの入れ替えを可能とする。
【解決手段】二重系列車制御装置の第1系31と第2系32は同一の構成を備えている。第1系31は常に第2系41を監視しながら制御指令送信しており、マスタとなる。第2系41は常に第1系31を監視しており、制御指令信号はスイッチで切断されておりスレーブとなっている。例えば、マスタ側の第1系31に異常が起きた時は、第2系41では、その信号を受信している受信手段44から故障検出手段45が第1系31の故障と判断し、第1系31の切り替え手段16をOFFに、また第2系41の切り替え手段16をONに切り替え、第2系41がマスタになる。
(もっと読む)
列車運転指示装置
【課題】 列車の運転計画に沿った運転曲線に自列車の位置と速度を一緒に示した画面上に進行方向前方における運転を支援する情報を表示し、また、列車の制動を制御する列車運転指示装置を提供する。
【解決手段】 走行線区に係る情報および計画運転曲線41を表示し、また列車の現在位置と速度を表す自列車符号42を表示すると共に、進行方向前方において列車が停止もしくは徐行通過すべき場所32,35,36,51を探知して、このような場所が検出されたときは列車が当該場所において停止もしくは徐行できるようなブレーキパターン43〜50を算出して、運転席に配備した表示装置に重複表示させ、また、ブレーキパターンを超えない限界地点で非常ブレーキを動作させる。
(もっと読む)
電力システム、電動車両および電力供給方法
【課題】複数の電動車両から車両外部の共通の電気負荷へ給電する際の電力制御を最適化する電力システムを提供する。
【解決手段】接続ステーションに接続された各車両の制御装置は、自身がマスター車のとき、PLC通信を用いてモデムを介してスレーブ車のSOCを受信する(S30)。そして、制御装置は、自身を含む各車両のSOCに応じて各車両から電力負荷への給電配分を決定し、その配分に基づいて各車両に対する給電指令値を算出する(S40)。制御装置は、その算出した給電指令値をモデムを介して対応のスレーブ車へ送信する(S50)。各車両は、マスター車の制御装置で算出された給電指令値に従って蓄電装置から電力負荷への給電を行なう(S60,S90)。
(もっと読む)
列車運転支援装置
【課題】列車の誤通過のおそれがある場合に、警告することによって運転士に対して列車の誤通過を防ぐための注意を促すことを可能とする。
【解決手段】駅別検知地点・基準速度データベース12は、列車が走行する走行区間内に存在する全ての駅に対して、当該駅毎に列車のブレーキ動作を開始すべき位置である検知地点(検知位置)を示す駅別検知地点データ(駅別検知位置データ)及び当該検知地点に対応する基準速度を示す基準速度データを格納する。速度検知部14は、検知地点での列車の速度を検知する。誤通過判定処理部17は、速度検知部14によって検知された列車の速度と予め設定された基準速度をと比較し、列車の誤通過のおそれがあるか否かを判定する。警告部18は、列車の誤通過のおそれがある場合に、列車の誤通過のおそれを警告する。
(もっと読む)
1 - 16 / 16
[ Back to top ]