
Fターム[5H269AB33]の内容
数値制御 (4,320) | 作業内容、対象機器、対象製品 (728) | 産業用ロボット、マニピュレータ (191)
Fターム[5H269AB33]に分類される特許
1 - 20 / 191
モニタリング装置

【課題】 ロボットや工作機械等の遠隔診断やモニタリングをする際に、通信回線の負荷状況に左右されずに正確な診断やモニタリングができるようにする。
【解決手段】送信データを作成する周期設定部130、310をロボット制御装置1とモニタ用コンピュータ3に設け、通信回線4の負荷状況を計測しながら最適な送信データ作成周期を設定する。
(もっと読む)
ロボット制御装置

【課題】教示点の位置・姿勢を修正するための手動操作を行う際に、ロボットと作業対象物が衝突しても、衝突によるダメージを低減することができるロボット制御装置を提供することを目的とする。
【解決手段】ロボット制御装置3は、ロボット本体のリンク上および作業ツール上に予め設定された特徴点と、特徴点の位置座標を表現するために設定された基準点に基づいて、ロボット4と作業対象物との接近距離を算出するための接近距離算出部11と、ロボット4と作業対象物との衝突を検出するための衝突検出部14を備えている。衝突検出部14は、接近距離に基づいて、衝突を検出するための閾値を決定し、サーボモータ18が発生すべきトルク値とサーボモータ18において発生しているトルク値の差を算出する。また、衝突検出部14は、トルク値の差と、閾値を比較し、比較の結果に応じて、ロボット4と作業対象物との衝突を検出する。
(もっと読む)
教示位置修正装置および教示位置修正方法
【課題】ロボットの姿勢変化が大きい場合でも、動作プログラムの教示点位置を正確かつ短時間で修正する。
【解決手段】教示位置修正装置(1)が、ロボット(2)を複数の教示点のそれぞれに順番に移動させ、該複数の教示点のそれぞれにおけるロボットの現在位置を順番に取込むことによって、動作プログラムにおける複数の教示点位置を修正する際に、修正後の教示点位置と修正前の教示点位置とに基づいて、位置修正量(A)を算出する位置修正量算出手段(11a)と、位置修正量(A)に基づいて複数の教示点のうちの未だ修正されていない未修正教示点位置の補正後の位置を算出する補正後位置算出手段(11b)とを含む。さらに、ロボットを未修正教示点に移動させるときに、移動手段(15)によって、ロボットを未修正教示点位置の補正後の位置まで移動させる。
(もっと読む)
ロボットシミュレーションのための装置、プログラム、記録媒体及び方法
【課題】ビンピッキング動作を含むロボットのワークハンドリング作業をオフラインで的確にシミュレートして、ロボットと周辺物との相互干渉を事前に確認できるようにする。
【解決手段】ロボットシミュレーション装置10は、センサモデル16M、ロボットモデル18M及びばら積み状態の複数のワークモデル20Mを仮想作業環境22に配置する作業環境モデル設定部24と、センサモデル及びロボットモデルにワーク検出動作及びビンピッキング動作を模擬的に遂行させる動作シミュレート部26とを備える。動作シミュレート部は、センサモデルにワークモデルを撮像させてその仮想画像MIを生成するワークモデル画像生成部28と、仮想画像から取出対象ワークモデルを特定してその仮想位置MPを検出するワークモデル位置検出部30と、仮想位置に基づきロボットモデルに取出対象ワークモデルをピッキングさせるロボットモデル動作制御部32とを備える。
(もっと読む)
速度制御方法及び速度制御装置
【課題】物体の通過する軌跡上の各点における曲率に応じた速度で物体を移動させる速度制御方法の提供。
【解決手段】軌跡の座標データを入力、軌跡上の各点における曲率を計算、算出された各点での曲率から各点での物体の速度を(1)式に示される角速度を用いた(2)式にて計算、算出された各点での速度を物体に出力。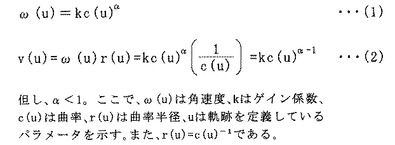 (もっと読む)
(もっと読む)
教示装置、コントローラ、自動機械システム、およびその無線通信方法
【課題】無線化された教示装置において、無線通信で一定周期毎にLIVE信号をやり取りし、その受信時間間隔を監視して、無線通信の通信状態が悪化している場合には、作業者に警告を発したり、自動機械を停止させたりすることで、安全な自動機械システムを提供する。
【解決手段】1つ以上の駆動機構を備える機構部と、前記機構部を駆動制御するコントローラ2と、前記機構部を操作する教示装置3を備える自動機械システムにおいて、前記教示装置3は、前記コントローラ2との無線通信を行う教示装置通信部と、前記教示装置通信部で一定周期毎にLIVE信号を監視する第1のLIVE信号監視部とを備え、前記コントローラ2は、前記教示装置との無線通信を行うコントローラ通信部と、前記コントローラ通信部で一定周期毎にLIVE信号を監視する第2のLIVE信号監視部と、前記コントローラ通信部にて受信した前記教示装置からの指令信号に基づいて前記機構部を駆動する駆動部とを備える。
(もっと読む)
ロボットのティーチングペンダントおよびロボット
【課題】オペレータがロボットの教示・手動運転時にティーチングペンダントをでこぼこな床面に置いた場合でも、マニピュレータにサーボ電源が投入されることなく、マニピュレータを停止させることができるロボットのティーチングペンダントおよびロボットを提供する。
【解決手段】ティーチングペンダント1は、オペレータがストラップ2に手を入れた際にストラップ2が引っ張られることにより把持を検出するティーチングペンダント把持検出スイッチ3を備え、ロボット制御盤5はティーチングペンダント把持検出スイッチ3による把持検出結果に基づいて、マニピュレータ52の電源を遮断するサーボ電源遮断部4を備えた。
(もっと読む)
モジュール制御用プログラム、制御システム
【課題】 複数の構成要素からなる制御システムにおいて各構成要素間の位置及び姿勢と共に、各構成要素のワールド座標系における位置及び姿勢を特定する処理を簡単に行う。
【解決手段】 固有の座標系を用いた複数の構成要素を連結してなる制御システムの各構成要素に実装されるモジュール制御用プログラムであって、自己の構成要素座標系におけるワーキングポイントWPを受け取る情報インターフェース14と、ワーキングポイントWPに所定のオフセットを与えるオフセット保持部12と、上位の構成要素からのワールド座標系における位置・姿勢情報Mn−1を受け取るプログラム間インターフェース11と、ワーキングポイントWPと所定のオフセットと位置・姿勢情報Mn−1とから、ワールド座標系における自己の位置・姿勢情報Mnを演算する座標変換処理部13と、位置・姿勢情報Mnを下位の構成要素に渡すプログラム間インターフェース15とを有する。
(もっと読む)
ロボットの教示装置
【課題】修正時間や作成時間を短縮して効率的にロボットの動作プログラムを作成できるようにする。
【解決手段】教示済みの第1のロボットの動作プログラムから、第1のロボットとは異なった機構や寸法を有する第2のロボットの動作プログラムを作成するにあたり、第1のロボットの制御装置から入手した動作プログラムを、第1と第2のロボットの情報に基づいたロボットプログラム変換条件3と、プログラムの命令構文形式の変換表7に従って、第1のロボットの動作プログラム中の位置データ及び命令構文形式を変更し、第1のロボットの制御点と同様に第2のロボットの制御点が動作するよう、第2のロボットの動作プログラムを生成するロボットプログラム変換実行部を備える教示装置とした。
(もっと読む)
制御システム
【課題】通信路で接続されマスタユニット、スレーブユニットを構成する各制御装置で生成するタイミング信号の位相差及び周期差を補正し、同期制御する制御システムを得る。
【解決手段】マスタユニット1とスレーブユニット21、…2nは通信路4で接続されている。マスタユニット1の周期信号発生器11で生成されたタイミング信号は通信路4を介して各スレーブユニットに送られる。各スレーブユニットは自己の周期信号発生器21で生成するタイミング信号とマスタユニット1からのタイミング信号の周期差、位相差を周期差測定器22、位相比較器23で求め、それぞれディジタルフィルタ24、25を通し、加算器26で加算し周期調整量を求める。この周期調整量によって周期信号発生器21は、タイミング信号の周期を調整する。マスタユニット1と各スレーブユニットのタイミング信号は、その周期も位相も一致するようになるから、正確な同期制御ができる。
(もっと読む)
溶接トーチの動作シミュレーション方法および装置
【課題】複雑な形状の部品等を溶接する場合においても、溶接トーチの溶接線に沿った動作をシミュレートすることができ、より理想的な条件に近い状態で溶接を行うことが可能となる溶接トーチの動作を見出すことのできる溶接トーチの動作シミュレーション方法および装置を提供することを目的とする。
【解決手段】溶接線に沿った複数の位置のそれぞれにおける溶接トーチの理想的な基準姿勢に対し、位置のそれぞれにおける溶接トーチの複数の姿勢情報を生成し、基準姿勢との差を算出する。そして、溶接線上で互いに前後する位置間において、溶接トーチの姿勢変化量を算出する。これら溶接トーチの複数の姿勢情報の基準姿勢に対する差と、姿勢変化量に基づき、基準姿勢に対する差が小さく、かつ姿勢変化量が小さくなるような溶接トーチの最適動作情報を生成する。同様にして、ポジショナの最適動作情報を生成することもできる。
(もっと読む)
モータの位置データを伝送し再生処理する方法およびその方法を実施する駆動制御システム
【課題】モータの位置データを伝送し再生処理する方法およびその方法を実施する駆動制御システムを得ること。
【解決手段】「A伝送路5上の伝送周期(第1の周期)」<「B伝送路6上の伝送周期(第2の周期)である状況下において、駆動制御装置1は、位置検出器4が第1の周期でA伝送路5上に送出したモータ3の位置データをその第1の周期でサンプリングし、所定数のサンプリング位置データを一つにまとめてデータ塊とし、それを(図に示す「パックデータ012」である)第2の周期でB伝送上に送出する。位置決め制御装置2は、B伝送路6からパックデータを第2の周期で取り込み、それを第1の周期で元の個々の位置データに戻す再生処理とそれに基づく推定処理とを行う。
(もっと読む)
モーション制御システム
【課題】 専用のケーブルを敷設しなくても、また、伝送遅延の計測やその結果に基づくコントローラ毎のタイミング調整をしなくても、連携動作のためにコントローラ間で処理プログラムの実行を同期させることが可能なモーション制御システムを提供する。
【解決手段】 いずれか1台のコントローラにプログラムの実行開始のきっかけとなるイベントが発生すると、同コントローラはそのイベントとその発生時刻からなるトリガを他のコントローラに同報送信し、各コントローラはトリガに含まれるイベント発生時刻に所定の遅延時間を加えた遅延トリガを発生させ、これを起点に一連の処理プログラムを起動する。
(もっと読む)
ロボットの教示支援装置
【課題】 最適な移動点毎の各関節の角度位置の組合せを短時間で演算可能な教示支援装置を提供する。
【解決手段】 解候補の組合せごとに移動点間の移動時間を全て求め、下流側の解候補に対して、移動時間が最も短い上流側の解候補の組合せを抽出する。その抽出結果に基づいて、始点から終点まで手先を移動させる全体的な移動時間が最も短くなる解候補の組合せを探索する。このようにして、全ての組合せを対象としたうえで、最適な解候補の組合せを求めることで、局所解に陥る可能性のある勾配法に比べて、最適な解候補の組合せを確実に得ることができる。また評価の低い組合せを除いて、最適な解候補の組合せを探索することで、評価の低い組合せを除かずに行う全域探索法に比べて、短時間に最適な解候補の組合せを得ることができる。
(もっと読む)
仕上げ加工装置及び仕上げ加工方法
【課題】複数部材を突き合わせて溶接した部位を除去し、滑らかな仕上げ表面を自動で作成することを目的とする。
【解決手段】本発明の仕上げ加工装置1は、ワーク2の所定部分20を除去して仕上げる加工ツール30を有するロボット3と、該ワーク2の除去すべき該所定部分20を含む三次元形状を測定し加工前形状データを得る計測手段4と、該加工前形状データから除去する該所定部分の除去形状データを取り除いた残存形状データから該所定部分の自由曲面データを得る自由曲面生成手段と、該除去形状データと該自由曲面データより除去する除去データを作成する除去データ作成手段と、該除去データに基づいて該ロボット3を駆動し該ワーク2の該所定部分20を除去するロボット制御手段と、をもつことを特徴とする。
(もっと読む)
ロボット制御装置
【課題】作業者が教示点の位置・姿勢を修正するための手動操作を行う際に、安価かつ簡単な構成で、位置・姿勢情報を修正することができるとともに、作業者への負担を軽減することができるロボット制御装置を提供することを目的とする。
【解決手段】ロボット制御装置3は、教示点の位置・姿勢を修正するための手動操作によるロボット4の動作速度を制御する動作速度制御部8と、手動操作に従って、ロボット4の動作を制御する動作制御部6とを備えている。動作速度制御部8は、ロボット本体のリンク上および作業ツール上に予め設定された特徴点と、特徴点の位置座標を表現するために設定された基準点との接近距離を算出するとともに、接近距離に基づいて、動作速度を決定する。動作制御部6は、決定された動作速度により、ロボット4を動作させる。
(もっと読む)
メンテナンス方法及びロボットコントローラ
【課題】生産性を低下させることなく、保守や故障診断を効率的に行うことのできるメンテナンス方法及びロボットコントローラを提供することにある。
【解決手段】ユーザ側ロボットシステムUR1にロボットRB、ロボットコントローラ1、パーソナルコンピュータPC及びティーチングペンダントTPを設けた。また、ユーザ側管理システムUR2及びメーカ側管理システムMRにそれぞれ解析用パーソナルコンピュータAPC1,APC2を設けた。そして、ロボットコントローラ1に、ロボットコントローラ1と解析用パーソナルコンピュータAPC1,APC2との間で各種データのやり取りを行うことのできるUSBメモリ22のUSBコネクタ22aが接続されるパネル側USBコネクタ20を形成した。さらに、ロボットコントローラ1にデータ保存のタイミングを指定することのできるトリガボタンTBを設けた。
(もっと読む)
多軸モータ位置検出信号伝達装置
【課題】複数のモータのそれぞれに配置された各位置検出装置から出力されるパラレル信号形態のモータ回転位置を表す検出信号を、少ない本数の配線群を介して、各モータを駆動制御するための各モータドライバに伝達可能な多軸モータ位置検出信号伝達装置を提案すること。
【解決手段】多軸モータ位置検出信号伝達装置6では、送信側変換器11が各ロータリエンコーダ4(1)、4(2)から供給されるパラレル信号形態の検出信号をシリアル信号に変換してシリアル信号伝送路13を介して受信側変換器12に供給し、受信側変換器12が、受け取ったシリアル信号形態の検出信号をパラレル信号形態に戻して各モータドライバ8(1)、8(2)に供給する。
(もっと読む)
産業用ロボットおよびたわみ補正方法
【課題】 ユーザーがワークの重量および重心を設定しなくとも精度の高いたわみ補正を自動的に実行できるようにする。
【解決手段】 ティーチング位置へ移動後、ワークを掴んでいない状態の各軸のトルクと、ワークを掴んだ状態の各軸のトルクからトルク変化分を求め、トルク変化―補正パルステーブル6により、各軸の補正パルスを求め、補正パルス分各軸動作させる。
(もっと読む)
ロボット制御装置
【課題】ロボットプログラムの作成、修正時間を短縮して効率的なロボットプログラム作成ができるようにするとともに、作業命令の区切りを明確化する機能を備えたロボット制御装置を提供する。
【解決手段】ロボットに対する少なくとも1つの命令からなる文字列型のロボットプログラムの内容を1つあるいは複数の行で表す表形式に変換する文字列-表形式プログラム変換部を備える。
(もっと読む)
1 - 20 / 191
[ Back to top ]