
Fターム[5H301AA02]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体の可動空間、領域、経路 (2,962) | 陸上 (1,642) | 屋内 (514)
Fターム[5H301AA02]に分類される特許
501 - 514 / 514
移動ロボット

【課題】ロボット本体ユニットに複数の車輪ユニットを取り付けて走行面上を移動及び/又は旋回する移動ロボットにおいて、簡単な構造で人体を検出する。
【解決手段】ロボット本体ユニット20に複数の車輪ユニット51〜53を取り付けて走行面2上を移動及び/又は旋回する移動ロボット1において、ロボット本体ユニット20の全周囲に亘って人体の有無を検出する第1のセンサ(焦電型赤外線センサ)27と、人体を検出した時に人体の方向を特定する第2のセンサ(サーモパイル)28と、人体までの距離を測定する第3のセンサ(距離センサ)22とをロボット筐体21に取り付けたことを特徴とする移動ロボット1を提供する。
(もっと読む)
自律走行移動体

【課題】 走行空間内の壁際や隅についても探索走行ができ、自律走行移動体を用いて作業を行うことができるとともに、走行空間内を探索移動するために必要な検知手段や検出手段の数をできるだけ減らし、小型化することが可能な自律走行移動体を提供することである。
【解決手段】 自律走行移動体1は、移動体本体10と、移動体本体10を走行させる駆動輪12と駆動モータ14と、駆動モータ14を制御する制御部20と、移動体本体10を走行させるための走行情報が入力され、かつ、入力された走行情報に基づいて駆動モータ14を制御するための制御情報を制御部20に与える操作ユニット50とを備える。
(もっと読む)
自律走行装置とそのプログラムおよび記録媒体
【課題】使用者のノウハウを機器の制御に具現化した、より一層、信頼性の高い最適制御を行うことができる自律走行装置を提供することを目的とする。
【解決手段】機器の状態を状態図として記憶する状態図記憶手段22と、機器の状態を検知する複数のセンサ10、13、19と、各センサのセンサ値を状態図記憶手段22の状態図に射影できるようにマップ計算結果として出力する自己組織化マップ計算手段21と、自己組織化マップ計算手段21によるマップ計算結果と状態図記憶手段22が記憶する状態図とから機器の制御信号を決定する状態図制御手段23とを有する。これにより、マップ計算結果と記憶する状態図との位置関係から機器の状態を把握し、その情報に基づいて機器の制御信号を決定するので、使用者のノウハウを機器の制御に具現化した、より一層、信頼性の高い最適制御を行うことができるものである。
(もっと読む)
自走式掃除機およびそのプログラム
【課題】コーナー部の清掃を重点的に行なうことが可能な自走式掃除機を提供することを目的とする。
【解決手段】特定のアルゴリズムに基づき指定領域を自律走行し、清掃を行なう機器本体1と、機器本体1の移動方向角度を検出するジャイロセンサ9と、ジャイロセンサ9で検知した移動方向角度から壁面形状を判断し、指定領域におけるコーナー部を走行したことを自動検出する壁面角検出部12とを備え、コーナー部を走行した場合、コーナー部手前まで壁面に沿って後退走行し、再度コーナー部を前進走行させてコーナー部の清掃を行なうものである。これによって、壁面付近を自動清掃する場合に、コーナー部を走行したかどうかの判断が可能となり、コーナー部を走行した場合には、コーナー部に適した重点的な清掃が可能である。
(もっと読む)
自走ロボット
【課題】 安価な構成で人体を追尾し撮像する。
【解決手段】 自走ロボット110は、第1センサ112〜第4センサ118と、カメラ130と、第1センサ112〜第4センサ118およびカメラ130を同時に移動させる駆動装置162と、第1センサ112〜第4センサ118およびカメラ130が停止したことを検出するロータリエンコーダ164と、熱源があることを第1センサ112〜第4センサ118のいずれか1つが検出すると、熱源を検出したセンサがあった方向にカメラ130が向くように、駆動装置162を制御し、停止後ものを撮像するように、カメラ130を制御し、停止後3秒が経過するまで、熱源を検出するか否かに関わらず、第1センサ112〜第4センサ118を固定するように駆動装置162を制御する制御部126とを含む。
(もっと読む)
移動体検出方法及びシステム
【課題】 マーカーを配置する天井の形状によらずに位置検出が行え、かつ天井へのマーカーの設置コストが安価な移動体位置検出方法及びシステムを提供する。
【解決手段】 本発明の移動体位置検出方法は、移動体に搭載され、画像を撮影してデジタル画像データを出力する撮影手段と、この画像データを画像処理する画像処理手段と、移動体の上方に設置され、色及び形状で各々の座標位置を示し、設置位置の絶対座標を示すマーカで構成された移動体検出システムで移動体の位置を検出する方法であり、撮影部が1以上のマーカを1つの画像で撮影する撮影過程と、画像処理手段が、撮影されたマーカの色,形状を検出及び認識する画像処理で、マーカの絶対座標を検出する座標検出過程と、画像処理手段が、撮影された画像上の中心と、マーカとの相対座標を計算し、検出した絶対座標と相対座標との関係から撮影点の位置を検出する撮影点検出過程とを有する。
(もっと読む)
掃除機ロボット、移動作業ロボット
【課題】障害物と接触することなく、障害物の直近で作業を行うことが可能な移動作業ロボットおよび掃除機ロボットを提供する。
【解決手段】走行しながら床面を掃除する掃除機ロボットにおいて、障害物を検知する障害物センサの向きを可変する方向可変手段を設ける。走行しながら掃除しているときに、障害物センサによって障害物を検知すると、方向可変手段を動作させることにより、障害物センサを障害物の有る方向へ向けて、当該障害物センサからの出力に基づいて、障害物までの距離および障害物の有る方向を検出する。
(もっと読む)
自走式掃除機
【課題】多くのセンサ類を必要としていたため、高コストであった。
【解決手段】一つの撮像素子61cの前方に二軸の光学系61a,61bを配置し、同撮像素子61cについては画素群を略中央で左右に二つの撮像領域61c1,61c2に分けた、任意の撮像対象についてずれが生じている二つの画像を取得可能なカメラ61を備えることで、清掃走行時においては障害物の検出が可能となり、セキュリティモード時においては人体検知と同検知した人体の撮像が可能となるため、障害検出や人体検出のために専用の各種センサを備えていた従来と比較して、何ら機能を低下させることなく、生産コストを大幅に抑制することができる。
(もっと読む)
無人搬送車による部品供給システム
【課題】
無人搬送車自身で無駄な走行停止を無くし、自動発進を行う動作制御が可能になり、渋滞や物品運搬の遅延による欠品を防ぐとともに、部品供給システムを構築する上での導入や変更に対して複雑な情報を定義すること無く、簡単な設定で対応できる。
【解決手段】
無人搬送車による部品供給システムにおいて、無人搬送車1が停止した時に行う作業内容を認識する作業内容認識手段6の情報により、無人搬送車1が積載している物品の種類および個数を判断し、前記無人搬送車の走行を制御装置で制御する。制御装置は、前記物品の重量を測定する重量測定手段7と、前記作業内容認識手段6および前記重量測定手段7の情報に基づいて物品の種類を識別する前記物品識別手段8と、前記作業内容認識手段6と前記重量測定手段7と物品識別手段8との情報に基づいて無人搬送車1の走行を判断する走行制御手段9とを備えている。
(もっと読む)
自律走行ロボット
【課題】作業領域別に異なる作業内容が指示でき、1つの作業領域に複数の作業内容が指示でき、しかも、作業内容を指定して所定の作業位置へ自律走行ができる。
【解決手段】赤外線信号を赤外線受信器4が受信すると、受信信号を解析し、走行コマンドであることを認識すると、走行コマンドに応じた走行制御を行う。そして、自己位置計測手段が逐次自己位置を計測する。登録コマンドが作業位置の登録コマンドであることを判断すると、自己位置計測手段が取得した現在の自己位置を作業位置情報として位置情報記憶手段により記憶部へ記憶する。また、作業内容の登録コマンドを受信したことを認識すると、登録コマンドに該当する作業内容を作業内容記憶手段により記憶部に記憶する。記憶部に登録した作業内容を選択すると、この選択した作業内容に対応した作業位置情報に基づいて所定の位置に案内し、この位置にて登録した作業内容を実行する。
(もっと読む)
自律移動ロボットの航法システム及びこの航法システムに利用される絶対座標を提供するフロア材
本発明は移動手段が装着された本体を有する自律移動ロボットの航法システムを提供する。本発明の航法システムは所定大きさを有するフロア面にお互いに所定の離隔距離を有するように形成されて、お互いに異なる固有座標値を有する二次元バーコードと、前記本体の下部所定位置に設置されてフロア面の二次元バーコードを読むようになされたバーコードリーダーと、前記本体に設置されてバーコードリーダーと電気的に連結されてバーコードリーダーが読んだ二次元バーコードの固有座標値によってメモリーに保存された所定の設定領域内での絶対座標を認識して、プログラムされた移動アルゴリズムに認識した絶対座標を適用して本体が移動できるように移動手段を制御する制御部とを含む。 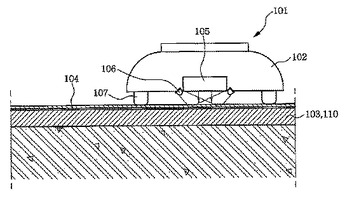 (もっと読む)
(もっと読む)
自律ロボットのドッキング方法
ロボット装置を基地局とドッキングさせるための方法は、オンボードバッテリにおいて低エネルギー準位を検出するステップと、前記ロボットを、前記ステーションによって放射された2つの赤外線ビームの間に検出された重複に対して方向を合わせるステップと、前記ロボットおよび前記基地局における充電端子の間の接触を検出するステップと、オンボードバッテリに充電するステップと、掃除機かけなどのロボットのタスクを再開するステップとを含む。前記ロボットと前記基地局との間の不注意による接触を防止するために回避信号を放射するためのシステム、および前記ロボット装置を前記基地局と正確にドッキングさせるために帰還信号を放射するためのシステムも開示される。 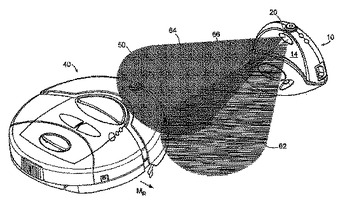 (もっと読む)
(もっと読む)
自走式クリーナ
【課題】 床への設置面積が小さく容易に小回りを行い、また、全体的な重量バランスがよく安定性に優れ、しかも、狭い隙間を確実に掃除する。
【解決手段】 自走クリーナ1の底面に第1の吸引口6を形成し、この吸引口6の長手方向側面に沿って案内部10を設け、この案内部と第1の吸引口との間に連通部12を設ける。案内部内に管体11の摺動部13を摺動自在に配置し、この摺動部の先端に第2の吸引口14aを設けたノズル部14を設ける。摺動部の後端部側を閉塞し、その後端部から延長部材15を延出させ、この延長部材にラックギアを形成する。また、摺動部の後端部側における第1の吸引口側には開口部13aを設ける。そして、モータ16の回転を延長部材に伝え、延長部材を押し出したときはノズル部を自走クリーナから突出させて狭い隙間の掃除を行い、また、延長部材を引き上げたときにはノズル部を自走クリーナ内に収納する。
(もっと読む)
無人搬送車の充電制御方法
【課題】 無人搬送車10が充電器13から充電を行っている間に、無人搬送車11と無人搬送車10との間に充電器が無い場合、無人搬送車11は、無人搬送車10が充電を終わるまで待機することとなり、作業能力の低下を招いている。
【解決手段】 無人搬送車10の進行方向がSlで次の充電ポイントまでに1台も他の無人搬送車が無くまた次の充電ポイントの充電器14が充電中で無い場合に上位コンピュータ2は充電終了の指示を給電用コンピュータ3に指示し、終了の指示を受けた給電用コンピュータ3は充電器13に対し充電終了を指示する。充電終了の指示を受けた充電器13は無人搬送車10に対し充電終了の指示を発行し無人搬送車10は現在の充電を終了し、次の充電ポイント14に向かう。
(もっと読む)
501 - 514 / 514
[ Back to top ]