
Fターム[5H301DD18]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体への指令の設定方法、設定手段 (1,386) | 無線により与えられるもの (358) | 音波により与えられるもの (15)
Fターム[5H301DD18]に分類される特許
1 - 15 / 15
ロボットシステム
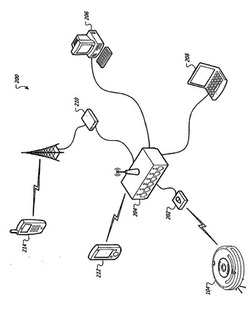
【課題】ネットワークデータブリッジおよび移動式ロボットを備えるロボットシステムが提供される。
【解決手段】ネットワークデータブリッジ202は、インターネットプロトコルネットワークに接続可能な広帯域ネットワークインターフェイスと、無線コマンドプロトコルネットワークに接続可能な無線コマンドインターフェイスと、広帯域ネットワークインターフェイス経由で受信するシリアルコマンドを抽出し、無線コマンドインターフェイス経由でブロードキャストするデータブリッジ構成要素と、を備える。また、移動式ロボット104は、ロボットを動かす駆動システムと、ネットワークデータブリッジから送信されるシリアルコマンドを受信する無線コマンド通信構成要素と、を備える。さらに、ネットワークデータブリッジは、製造者サーバおよび移動式ロボット間の通信のため、広帯域ネットワークインターフェイスを介して製造者サーバに接続可能である。
(もっと読む)
生産設備制御システムおよび生産設備制御方法

【課題】作業者が生産設備の電源制御の指示を認識することができる生産設備制御システムを提供する。
【解決手段】本発明の生産設備制御システム100は、設備制御部120、放送装置130、および情報収集器140を有する。設備制御部110および放送装置120は、可聴音帯域の特定周波数の信号レベルを特定周波数より低い周波数で周期的に変化させて生成された音波を送信する。情報収集器140は、音波を受信して特定周波数の信号レベルを選択的に抽出し、抽出された特定周波数の受信信号レベルの変動が設備制御部120による送信信号レベルの周期的な変化に対応する場合、特定周波数の周波数成分を解析した結果に基づいて制御対象設備150,160に対して電源制御または運転制御を実行する。
(もっと読む)
清掃装置
【課題】簡単な操作で清掃装置を回収位置まで誘導することができるようにする。
【解決手段】水中において床面を走行しながら清掃する清掃装置本体1と、清掃装置本体1を遠隔操作する無線式の遠隔操作手段2とを備える清掃装置であって、遠隔操作手段2は、清掃装置本体1に設けられる少なくとも2つの受信部11,11と、各受信部11,11から離れた位置で、各受信部11,11に所定の超音波を送信する送信機12とを備え、清掃装置本体1は、送信機12から送信される超音波を各受信部11,11が受信したときに、各受信部11,11で受信された超音波の受信情報が異なる場合に、各受信情報が等しくなるように方向転換をするとともに、各受信部11,11の受信情報が等しくなったときに、その進路が送信機12に向くように構成される。
(もっと読む)
水中航走体の発射回収システムおよびこの発射回収システムを備える船舶
【課題】小型船舶で安全に水中航走体の発射回収を行うことを目的とする。
【解決手段】水中を航走可能な水中航走体5と、水中航走体5を水中で発射または収容する発射回収カゴ3と、発射回収カゴ3に配置され、水中航走体5を誘導する誘導信号を発するピンガP1、P2,P3,P4とを備え、水中航走体5には、ピンガP1、P2,P3,P4から発せられた誘導信号を受信するハイドロフォン23と、ハイドロフォン23からの信号に基づいて発射回収カゴ3の位置および姿勢を計測する位置姿勢計測部と、位置姿勢計測部により計測された発射回収カゴ3の姿勢に合わせて水中航走体5の姿勢を制御する姿勢制御部とが設けられている水中航走体の発射回収システム10を提供する。
(もっと読む)
移動体制御システム及び移動体制御方法
【課題】高価な集中制御装置を用いることなく、各移動体の移動経路を最適化できるようにする。
【解決手段】移動体制御システム1を、移動体の自己位置を特定する自己位置特定手段2と、他の移動体の存在を検知する移動体検知手段3と、前記移動体の駆動中に得られる前記自己位置に関する情報及び前記他の移動体の存否に関する情報に基づいて、前記移動体同士が出合うことの多い場所を示す出合多発エリアを設定する出合多発エリア設定手段4と、前記出合多発エリア設定手段により設定される前記出合多発エリアに基づいて、前記移動体の行動計画を生成する行動計画生成手段5とを具備して構成する。
(もっと読む)
移動体、及びその制御方法
【課題】音源に対して確実に近づくことができる移動体、及びその制御方法を提供すること。
【解決手段】
本発明の一態様にかかる移動体は、目標停止位置まで自律移動する移動体100であって、移動体100の外部で発生した音の前記移動体に向かう方向を特定するマイクロフォンアレイ121と、移動体100が移動する領域に応じて記憶されている地図データにおいて、音源の候補となる音源候補対象の位置を記憶する音源候補対象記憶部52と、音源の方向と、音源候補対象の位置とに基づいて、音源の位置を推定する音源位置推定手段12と、推定された音源の位置から目標停止位置を決定する停止位置決定手段13と、移動体の現在位置から目標停止位置まで移動体100を移動させる駆動制御部16と、を備えるものである。
(もっと読む)
移動ロボットの位置推定方法及び装置
【課題】 信号発生装置によって発信された信号を正確に検出して移動ロボットの位置推定の正確度を高める方法及び装置を提供する。
【解決手段】 本発明は移動ロボットの位置推定方法及び装置に関するもので、本発明の一実施形態による移動ロボット位置推定方法は所定の信号発生装置から発信された第1信号及び第2信号を移動ロボットに具備された第1信号を受信するセンサと第2信号を受信する3個以上のセンサによって第1信号及び第2信号を受信する段階、第1信号から抽出された時間情報を使用して第2信号を受信する各センサまでの発信距離を計算する段階、及び発信距離から移動ロボットの位置を計算する段階を含み、第2信号は信号発生装置から2回以上発信され、第2信号を受信する各センサは最初受信された第2信号の測定結果によって、それ以降受信される第2信号の増幅の可否を計算する。
(もっと読む)
自律移動型ロボットとそのシステム
【課題】ユーザが任意に選択した位置情報を容易に教示することができ、かつ、この教示された位置情報に基いて移動先を指定することで、指定された移動先に自律移動する自律移動型ロボットとそのシステムを提供する。
【解決手段】ユーザからの位置情報及び移動先情報の入力を受ける情報入力部20と、情報入力部20から入力された位置情報と位置推定部14で推定した位置とを関連付けてテーブルに記憶する位置情報記憶部21とを備え、情報入力部20に対して移動先情報の入力があると、移動経路計画部15が、入力された移動先情報と位置情報記憶部21に記憶されているテーブルとを対応させ、ロボットの移動空間内の障害物情報であるマップデータを参照して、位置推定部14で推定された位置からの移動経路を求め自律移動する。
(もっと読む)
自立走行可能な家事装置の動作方法及びベースステーションの動作方法
【課題】 この種類の方法を、自立走行する床用の集塵装置が1つ又は複数の部屋で確実に動作可能になるように、さらに改良すること。
【解決手段】 本発明は、床用の集塵装置等の家事装置(1)を1つの部屋(A−D)又は複数の部屋(A−G)内で動作させる方法に関する。この種類の方法を、自立走行する床用の集塵装置が1つ又は複数の部屋で確実に動作可能になるように、さらに改良するために、必要に応じてベースステーション(3)に付加的にステーションエレメント(4)が配置され、これら(4)がステーションエレメント(4)の個々の場所について推測させる信号を送信し、家事装置(1)がこれらの信号を処理しつつ部屋(A−G)に進路をとることが提案される。
(もっと読む)
移動ロボットの状態報知装置及び状態報知方法
【課題】移動ロボットの動作状態は、ブザー音の発生や情報コードの表示等の手段で提供されており、使用者はその状態を直接的に理解することが困難であった。
【解決手段】移動ロボットの動作状態を知らせるオーディオ信号を出力する音声案内部を備え、動作中の移動ロボットの状態、あるいはエラーに対応する音声あるいは多様なメロディーを出力することによって、使用者が移動ロボットの状態を迅速で明確に認知可能な移動ロボットの状態報知装置を構成する。
(もっと読む)
水中航走体の検出位置修正方法およびシステム
【課題】 水面に浮上する手間やトランスポンダなどを設置する手間などを省けるようにする。
【解決手段】 水中航走体に予め与える航走経路中に、相互に交差する緯度検出経路44と経度検出経路46とからなる位置修正用経路43を設定する。水中航走体は、慣性航法により検出した位置に基づいて、緯度検出経路44と経度検出経路46とを連続して航走する。位置修正用経路43を航走中の水中航走体と支援船との相対位置を音響測位する。支援船について求めた位置と音響測位した相対位置とに基づいて、水中航走体が実際に航走した緯度、経度を求める。水中航走体が実際に航走した緯度、経度と位置修正用航路との偏差δLAT、δLONを求め、この偏差を水中航走体に与えて検出位置を修正する。
(もっと読む)
ロボット装置、ロボット装置の移動方法、および、プログラム
【課題】 ユーザからの指示に応じて、適切な移動方法で移動を行うロボット装置の提供。
【解決手段】 自律的に動作を行うロボット装置は、自装置の移動を行う移動部4と、目標物の位置情報を定期的に取得する目標物位置取得部38とを備える。移動方法判断・指示部35は、ユーザから移動に係る指示を入力し、移動先を固定の位置情報で指定できるものであるか否かを判断し、指定できると判断した場合には、位置移動制御部36による制御を行い、指定できないと判断した場合には、目標物位置取得部38から定期的に位置情報を取得する追跡移動制御部37による制御を行って、移動部4を動作させる。
(もっと読む)
特にゴルフコースでの物体を輸送するための自動駆動の車両
物体及び特にゴルフコースでの種々の物品を輸送するための車両で、車両上に設置された少なくとも1台の蓄電池により供給される少なくとも1台の電気牽引モーターから成り、一連の超音波センサーが、外部信号源から来た信号を検出でき、又、マイクロコンピュータ制御装置が前記センサーと、又、前記少なくとも1台の電気モーターの電子速度調節器と接続して、前記外部の基準信号源の位置を参照して、1セットの事前決定された位置を維持するように、自動的に案内される。車両/発信源の相対的位置を正確に決定するために、同一領域で動作している類似の車両との干渉を避けるために、車両のマイクロコンピュータ制御装置内で特別のアルゴリズムが実行される。  (もっと読む)
(もっと読む)
移動体操作システム
【課題】操作を容易にし、しかも、移動体に対して常に正しい移動指示を行う。
【解決手段】遠隔操作端末は赤外線LEDから偏光板を介して赤外線を発信するとともに超音波発信器から超音波を赤外線と同じタイミングで発信する。移動体は遠隔操作端末からの赤外線を、それぞれ異なる偏光角度を持った偏光板13,14を介してホトディテクタ11,12で受光するとともに超音波を超音波受信器10で受信する。CPU30は赤外線を受信してから超音波を受信するまでの時間をカウンタ31にカウントさせる。そして、このカウントした時間から遠隔操作端末との距離を測定し、この距離がメモリ32に初期設定されている所定の距離に常に一致するように移動体を走行制御する。また、2つのホトディテクタの受光出力のピーク値を検出し、そのピーク値の関係から遠隔操作端末との方向角度を検出し、その方向角度が例えば0°になるように移動体を制御する。
(もっと読む)
移動ロボット呼出装置及びその方法
【課題】 ロボット掃除機のような移動ロボットを使用者が直接持って所望の場所に移す必要なく、使用者が特定場所から移動ロボットを呼び出したとき、該移動ロボットが前記特定場所に自ら移動するようにすることで、使用者の便宜性を向上し得る移動ロボット呼出装置及びその方法を提供する。
【解決手段】 移動ロボット呼出装置は、遠隔制御機に設置され、使用者によって呼出信号が入力されると、移動ロボットを呼び出すためのRF信号及び赤外線信号を発生する発生部と、前記移動ロボットに設置され、前記RF信号が受信されたとき、前記赤外線信号を受信した赤外線受信器の位置に基づいて前記遠隔制御機の方向を計算し、該計算された方向に前記移動ロボットを回転させた後、前記移動ロボットを直進させる制御器と、を含んで構成される。
(もっと読む)
1 - 15 / 15
[ Back to top ]