
Fターム[5H301EE17]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 誘導経路の構造、配置、作成手段 (641) | 経路に沿って配置された手段によるもの (623) | 特殊な経路を有するもの (28) | 複数経路間の渡り用経路を有するもの (19) | 交差点での渡り用経路を有するもの (8)
Fターム[5H301EE17]に分類される特許
1 - 8 / 8
搬送車システム
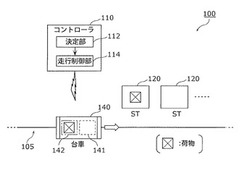
【課題】効率的な搬送作業を実現するための搬送車システムを提供すること。
【解決手段】複数のステーション120に沿って設けられた経路105と、経路105に沿って走行する台車140と、台車140の制御を行うコントローラ110とを備える搬送車システム100であって、台車140は、走行方向に並べて配置された第一載置台141と第二載置台142とを有し、方向転換することで、第一載置台141および第二載置台142のいずれをも走行方向における前方とすることが可能であり、コントローラ110は、荷物の移載作業の内容と荷物の載置状況とを用いて、第一載置台141および第二載置台142のいずれを前方にすべきかを決定する決定部112と、台車140の走行を制御することで、台車140を、決定された第一載置台141または第二載置台142が前方である状態で、目的ステーションに到着させる走行制御部114とを有する。
(もっと読む)
搬送車及び搬送システム

【課題】搬送車において、走行領域に存在する障害物を好適に検出する。
【解決手段】搬送車(200)は、軌道(100)に沿って走行する走行部(210)と、走行部に取り付けられており、被搬送物(400)を積載して搬送可能な搬送部(220)と、搬送部の前面部又は後面部の端部周辺に設けられた一対の障害物センサ(261,262)とを備えている。一対の障害物センサは、正面視して互いにハの字状となるように傾斜して配置されていると共に、正面視して互いの走査範囲(A1,A2)が交差するように配置されている。
(もっと読む)
走行車システム
【課題】 方向指示器の制御データを自動的に作成する。
【構成】 ルートマップでのカーブ方向の記載に基づいて、方向指示器の制御データを作成する。
(もっと読む)
搬送台車システム及び搬送台車への走行経路の指示方法
【構成】 搬送台車の走行ルートを構成する、互いに連結された複数のセグメントから、搬送台車を実際に走行させる経路を構成する複数のセグメントをオペレータがマニュアルで指定することを受け付け、指定された複数のセグメントに従って、走行指令を作成し、走行指令に従って搬送台車を走行させる。
【効果】 マニュアルでの走行経路の指定が容易になる。
(もっと読む)
走行車の走行制御システム
【課題】 少なくとも第1の走行路と第2の走行路とが接続する接続点を有する走行路網において、第1の走行路を接続点に向かって第1の走行車が走行し、第2の走行路を接続点に向かって第2の走行車が走行する場合に、第2の走行車に対する第1の走行車の優先的な走行を容易に実現することができる走行車の走行制御システムを提供する。
【解決手段】 無人搬送車Vの走行制御システムSでは、カウンタ2及びリミットスイッチ3〜5により、接続点Pを含む接続エリアA内に存在する無人搬送車V1,V2の数が計数される。そして、カウンタ2の値が1以上の場合には、停止コマンド6により、接続エリアAの手前において無人搬送車V2が停止させられ、カウンタ2の値がゼロの場合には、赤外線投光器7により、接続エリアA内に無人搬送車V2が進入させられる。
(もっと読む)
車両位置検出装置及びシステム
【課題】敷設コストを抑え、精度の高い位置検出を可能とする車両位置検出装置を提供する。
【解決手段】車両位置検出装置において、車両周辺の映像を撮影する撮像部と、撮影された映像を画像データとして取り込む入力部と、取り込まれた画像データの中から所定の形状を持つ指標を認識し、認識された指標の種類を特定する認識部と、特定された指標の種類とその指標の種類に対応する位置情報とを記憶する記憶部と、特定された指標の種類に基づき、上記記憶部から位置情報を取得する取得部と、取得された位置情報により車両の位置を決定する決定部とを備える。
(もっと読む)
物品搬送設備
【課題】 構成の複雑化を招くことなく、デッドロック状態を極力早く回避すること。
【解決手段】 管理部5は、複数の移動経路1のすべてから複数の移動体2が交差点D2に向けて同時に進入する場合には、退避対象の移動体2aに対して、退避用運行指令情報T1を移動制御手段4に指令し、かつ、退避対象の移動体2a以外の移動体2に対して、停止用運行指令情報T2を移動制御手段4に指令し、次に、退避対象の移動体2a以外の移動体2の一つに対して、指定通過用運行指令情報T3を移動制御手段4に指令する形態で、退避対象の移動体2a以外の移動体2に対して、通過用運行指令情報を移動制御手段4に順次指令し、その後、退避対象の移動体2aに対して、復帰通過用運行指令情報を移動制御手段4に指令するように構成されている。
(もっと読む)
搬送システム
【課題】 搬送台車同士の衝突を防止しつつ、搬送効率を向上することができる搬送システムを提供する。
【解決手段】 交差エリアに属する支線軌道22の入口に入口用バーコードリーダ15を設置し、読み取った搬送台車1bのバーコード4をコントローラ11の台車管理記憶部12に記憶する。また、交差点23に出口用バーコードリーダ17を設置して、読み取った搬送台車1bのバーコード4をコントローラ11の台車管理記憶部12から消去する。コントローラ11では、台車管理記憶部12にバーコード4が記憶されていない場合に、交差エリアに属する本線軌道21上に設置されている減速投光器14を作動させて、交差エリアに属する本線軌道21上を交差点23に向かって走行する搬送台車1aに対し、交差エリアに属する支線軌道22上に搬送台車1bがないことを告知して高速走行させる。
(もっと読む)
1 - 8 / 8
[ Back to top ]