
Fターム[5H501GG04]の内容
電動機の制御一般 (20,975) | 制御系 (2,202) | 速度フィードバックするもの (715) | 負荷の検出値をフィードバックするもの (45)
Fターム[5H501GG04]に分類される特許
1 - 20 / 45
アクチュエータ制御装置及び方法
駆動制御装置、画像形成装置、駆動制御方法及びプログラム
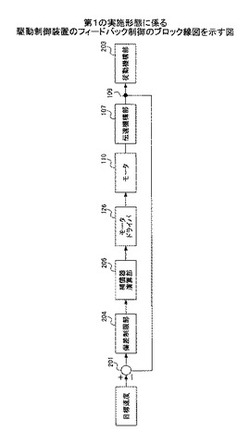
【課題】起動時において、機構のバックラッシュ等のギヤの噛合いで生じる衝撃によってエンコーダ等の検出系が加振され、機構の速度や位置が誤検出された場合であっても、フィードバック制御系が安定となるような駆動制御装置、画像形成装置、駆動制御方法及びプログラムを提供すること。
【解決手段】電動機と、前記電動機の出力を伝達する伝達機構部と、前記伝達機構部に連結することで前記電動機の出力により駆動される従動機構部と、前記電動機、前記伝達機構部又は前記従動機構部のいずれか1つの速度又は位置を検出する検出部と、前記検出部の出力値と目標値との偏差の値に基づき、補償器を用いて所定の演算を行う補償器演算部と、前記補償器演算部の結果に基づいて前記電動機を駆動させる電動機駆動部と、を有する駆動制御装置であって、前記補償器演算部に入力する前記偏差の値に制限をかける偏差制限部を有する駆動制御装置によって解決される。
(もっと読む)
主軸駆動用モータの制御装置

【課題】主軸にかかる負荷が大きい場合はモータと主軸との間にスリップが発生し、主軸位置検出結果をモータ速度のフィードバック制御に利用するとモータ速度の制御が不安定になるという問題が生じていた。
【解決手段】本発明の制御装置は、位置指令値に従って電流指令値を出力する速度制御部と、モータに流れる電流を検出する電流検出部と、電流に基づいてモータの第1速度を推定する第1速度推定部と、主軸の近傍に設けられたセンサにより検出される主軸位置に基づいて算出される主軸速度及び変速比に基づいてモータの第2速度を推定する第2速度推定部と、モータ負荷の値を算出する負荷演算部と、を有し、速度制御部は、モータ負荷の値が所定の値以上の場合は第1速度を用いて電流指令値を算出し、モータ負荷の値が所定の値未満の場合は第2速度を用いて電流指令値を算出する、ことを特徴とする。
(もっと読む)
モータ制御装置
【課題】動作中に振動特性が変化する制御対象に対する振動抑制制御の精度を向上できるモータ制御装置を得ること。
【解決手段】モータ1a及び振動可能要素1bを有する制御対象1の動作を制御して、制御対象の動作を動作目標値に追従するようにモデルトルクτaを生成するフィードフォワード制御部111と、モデルトルクに応じてトルク指令τMを発生させる発生部とを備え、フィードフォワード制御部は、制御対象の振動関連情報に応じて、振動特性を表す振動パラメータθを生成する生成部と、振動パラメータに応じて、動特性を模擬した数式モデル121を変更し、モデルトルクから変更された数式モデルにより、制御対象の動作状態を含むモデル変数を演算する第1の演算部と、モデル変数が一定の追従特性で動作目標値に追従するように、振動パラメータに応じて特性を変化させた演算によりモデルトルクを演算する第2の演算部とを有する。
(もっと読む)
制御装置、および測定装置
【課題】制御性能を向上させる制御装置、および測定装置を提供する。
【解決手段】駆動制御回路3は、測定子を変位させる駆動機構25を駆動制御し、駆動機構25に流れる電流を検出する電流検出センサ27と、駆動機構25を駆動させる駆動速度に応じた目標電流を設定する速度制御部32と、目標電流および電流検出センサ27により検出された検出電流の電流偏差に、積分ゲインおよび比例ゲインをかけて駆動機構25に出力する出力電流を設定する電流制御部33と、を具備し、電流制御部33は、駆動機構25の駆動速度に応じて、積分ゲインおよび比例ゲインのうちの少なくともいずれか一方を切り替える。
(もっと読む)
モータ制御装置、モータ制御方法、及び制御プログラム
【課題】位置制御ゲインを切り替える際の位置偏差を低減させ、整定時間を短縮する。
【解決手段】モータ制御装置は、モータを用いて対象物を目標位置に移動させる際に用いる加速度指令値を時系列に示す加速度パターンを生成し、生成した加速度パターンに対して、モータの応答特性に応じてモータの駆動速度を減速する期間を延ばす変更をし、変更した加速度パターンから位置指令値を出力する指令生成部と、指令生成部が出力する位置指令値と、対象物の目標位置との位置偏差に対する比例制御を用いてモータを駆動するとともに、対象物が目標位置の近傍に達したときに比例制御における比例制御ゲインを現在値より大きい値に変更する制御部とを具備する。
(もっと読む)
電動シリンダの制御方法及び電動シリンダの制御システム
【課題】 電動シリンダのロッドと被加圧部材が予期しない衝突を起こすことで生じるオーバーロードにより、電動シリンダやロッドに連結された荷重検出器が破損することを防ぐことができる電動シリンダの制御方法及び制御システムを実現する。
【解決手段】サーボコントローラ17は、荷重検出器13によって検出された加圧荷重Pmが衝突検知荷重Pc以上であるか否かを判定し、加圧荷重Pmが衝突検知荷重Pc以上であると判定した場合に、更に、衝突時停止フラグがONであるか否か、ロッド11の駆動速度Smが衝突許可速度Sc以上であるか否か、を判定し、衝突時停止フラグがONである、または、駆動速度Smが衝突許可速度Sc以上であると判定した場合に、サーボアンプ16に逆方向位置指令パルス信号を出力し、サーボアンプ16に蓄積されている溜りパルスを強制的に減少させてロッド11を停止させる。
(もっと読む)
モータを備える機器
【課題】 移動体を移動させるタイミングベルトの伸びの変化があっても、モータのコギングの影響を抑制する。
【解決手段】 移動体と、モータと、モータを駆動する駆動手段と、エンコーダとを備える電子機器であって、前記モータが接続されたモータプーリと、従動プーリと、タイミングベルトを備え、前記移動体を走査する走査手段と、前記エンコーダから出力された信号に基づく位置と速度の情報に基づき駆動指令に従って第1制御信号の生成を行うとともに、前記モータのコギング周期と前記位置の情報に基づく周期的な第2制御信号の生成を行い、前記第1及び第2制御信号を前記駆動手段へ出力する信号生成手段とを備え、前記移動体の第1走査位置に対応する前記第2制御信号の周期は、従動プーリ前記第1走査位置より前記従動プーリに相対的に近い第2走査位置に対応する前記第2制御信号の周期と異なる。
(もっと読む)
投射型表示装置
【課題】簡易な構成で、筐体内部の温度を適正に制御することが可能な投射型表示装置を提供する。
【解決手段】温度センサ90は、外気の吸入経路上に配置され、筐体内に取り込まれた外気の温度を検知し、その検知した外気温度に応じたアナログ電圧V1を生成する。温度センサ90は、生成した電圧V1を制御装置50を介さずにファン駆動回路80へ直接的に入力する。ファン駆動回路80は、温度センサ90の出力電圧V1に基づいて排気用ファン70を駆動するための駆動電圧V2を生成し、その生成した駆動電圧V2を排気用ファン70へ出力する。また、ファン駆動回路80は、温度センサ90の出力電圧V1に基づいて吸気用ファン60を駆動するための駆動電圧V3を生成し、その生成した駆動電圧V3を吸気用ファン60へ出力する。
(もっと読む)
過熱保護装置
【課題】使用条件に応じた過負荷保護を可能としながら、電力変換器の性能を最大限に利用することが可能な過熱保護装置を得る。
【解決手段】複数の半導体スイッチング素子で構成された電力変換器と、電力変換器の動作を制御する制御部1とを備えた電力変換装置に適用され、電力変換器を停止させる過負荷保護信号12を制御部1に出力する過熱保護装置において、電力変換器から負荷4に供給される電流を検出し負荷電流検出値10として出力する負荷電流検出部14と、半導体スイッチング素子の周囲温度を検出し周囲温度検出値Taとして出力する温度検出部5と、負荷電流検出値10と周囲温度検出値Taと基づいてインバータ主回路素子のジャンクション温度推定値11を演算し、ジャンクション温度推定値11と過負荷保護設定値7とに応じて過負荷保護信号12を出力する過負荷保護部20とを備える。
(もっと読む)
エレベータ装置
【課題】かごの走行開始時における起動ショックを長期にわたって十分に低減できるようにしたエレベータ装置を提供する。
【解決手段】巻上機2における駆動軸10の回転方向で回転変位可能に電磁ブレーキ13を支持するブレーキ支持装置14を設け、コントロールユニット12が、かごの走行を開始すべく電磁ブレーキ13を解放する前に、電磁ブレーキ13の変位量を減少させる方向に駆動モータ8を駆動し、その駆動モータ8の発生トルクによってかごとカウンターウエイトの重量差に基づくアンバランストルクを相殺する。
(もっと読む)
電動車両の制振制御装置
【課題】電動モータがフリーで回転上昇するトルク伝達の途切れ区間においてF/B演算を停止することで、駆動軸へのトルク伝達開始後の振動に対し、充分な制振効果を得る電動車両の制振制御装置。
【解決手段】モータ/ジェネレータMG付FRハイブリッド車両において、ドライバー要求に基づくF/F演算により第1トルク目標値Tm*1を算出する第1トルク目標値算出手段101と、トルク入力−モータ回転数の伝達特性モデルGp(s)を用いたF/B演算により第2トルク目標値Tm*2を算出する第2トルク目標値算出手段102と、Tm*1とTm*2に基づく演算によりトルク指令値Tm*とするモータトルク指令値設定手段103と、プロペラシャフトPSへのトルク伝達の途切れを判定すると共に、トルク伝達の途切れ中と判定している間、第2トルク目標値Tm*2のF/B演算を停止する制振制御部106とを備えた。
(もっと読む)
モータ制御装置
【課題】始動時の初期診断時間を短縮することができるモータ制御装置を提供する。
【解決手段】イグニッションOFFとなったとき、操舵補助制御を中止し、電動モータ12の温度tが所定温度t1以下となるまで、電源を自己保持して電動モータ12の温度推定処理を継続する。このとき、電源リレー回路33をオフ状態として電動モータ12を強制駆動し、電源安定化用コンデンサの電圧Vrが規定電圧VrTH以下であって、且つ電動モータ12の温度tが所定温度t1以下となった時点で電源自己保持機能をオフ状態とする。
(もっと読む)
車両駆動モータ制御装置
【課題】車両駆動モータを制御する装置において、車両駆動モータの状態および車両駆動モータが配置された環境に応じた制御を行うことを目的とする。
【解決手段】コントロールユニット16は、運転操作指令、モータ22の回転速度等に基づいて、目標とするトルク指令値を求める。そして、トルク制御マップを参照し、その回転速度およびトルク指令値の条件において、分担電圧DVが許容電圧PDを超えるか否かを判定する。コントロールユニット16は、分担電圧DVが許容電圧PD以下であるときは、そのトルク指令値に基づいて昇圧コンバータ12およびインバータ14を制御する。一方、分担電圧DVが許容電圧PDを超えるときは、コントロールユニット16は、トルク制御マップを参照し、分担電圧DVが許容電圧PD以下となるよう、昇圧コンバータ12およびインバータ14の制御によって界磁巻線に流れる電流を調整する。
(もっと読む)
舵角検出装置
【課題】軸角検出器及びモータ角検出器の検出値の組み合わせにより算出される舵角に現出する周辺温度の影響を排除し、正確な舵角を求め得るようにする。
【解決手段】舵取機構1の周辺温度を温度センサ8により検出し、この検出温度を舵角算出部7に与える。舵角算出部7は、軸角検出器5の検出値とモータ角検出器6の検出値との組み合わせにより舵角を算出するに際し、軸角検出器5又はモータ角検出器6の検出値を、温度センサ8の検出温度に基づいて補正し、補正された検出値を用いて舵角の算出を実行する。
(もっと読む)
電動機の制御装置
【課題】本発明の目的は、内燃機関の爆発がある状態及びない状態に関わらず、クランク軸のトルク脈動成分によって発生する駆動軸の振動を低減させることができる電動機の制御装置を提供することにある。
【解決手段】本発明は、エンジン10のクランク軸12のトルク脈動成分によって、車両の駆動軸18に発生する振動を低減するように電動機を制御する電動機の制御装置であって、クランク軸12のトルクを求めるクランク軸トルク推定部42と、クランク軸12のトルクからトルク脈動成分を抽出するトルク脈動成分算出部44と、トルク脈動成分及び駆動源から駆動軸へのトルク伝達関数に基づいて、駆動軸18のトルクからトルク脈動成分を除去する補償トルクを算出する補償トルク算出部46と、電動機のトルク指令値から補償トルクを減じ、電動機のトルク指令値を補正するトルク補正部48と、を備える。
(もっと読む)
駆動装置による電気機械の駆動方法および電気機械に対する駆動装置
【課題】付加的なコストなしに電気機械の駆動部品の障害を早期に特定して、電気機械の生産性を向上させる。
【解決手段】駆動装置が該駆動装置によって駆動される電気機械の障害、例えばベアリング損傷を識別する診断ユニットと閉ループ制御および/または開制御ユニットとを有している、駆動装置による電気機械の駆動方法、特に駆動制御器によるサーボモータの駆動方法において、a)前記電気機械を自動で閉ループ制御および/または開制御し、b)前記電気機械の少なくとも1つの振動を自動で検出し、c)前記診断ユニットにより検出された振動を考慮して前記電気機械の状態分析を自動で行う。
(もっと読む)
サーボ制御装置
【課題】工作機械の負荷等に発生する「ひずみ」や「粘性」等があっても、簡単な制御演算により、工作機械の負荷位置を正確に制御する。
【解決手段】モータ12の回転運動を、ボールねじ送り部にて直線運動にして負荷であるテーブル02を直線移動させている。逆特性モデル300には、負荷であるテーブル02のイナーシャ、粘性、ばね剛性を考慮しつつ、ばね粘性を無視すると共に、モータ12のイナーシャや粘性を考慮して、「ひずみ」等を補償する補償制御用伝達関数が設定されている。したがって指令位置θを、補償伝達用関数にて補償して得た補償速度V300を、位置制御ループに追加することにより、「ひずみ」等に起因する誤差を補償することができる。また、負荷のばね粘性を無視して、補償制御用伝達関数を設定しているため、この補償制御用伝達関数を簡略化でき、補償演算が簡単にできる。
(もっと読む)
携帯型電動工具
【課題】モータの回転速度を作動中に自動的に決定して制御するための手段を有する携帯型電動工具を提供することが本発明の目的である。
【解決手段】ドリルの出力部6を駆動するための電動モータ4を収容する本体2を具備するハンマードリルが開示される。振動変換器12がモータ4によって生み出された振動を検知するとともに検知した振動に応じた振動信号を生成する。電子モジュール10が、モータの回転速度を制御するコントローラ10aと、振動変換器12から振動信号を受信して、振動信号に基づいてモータ4の回転速度を決定して、コントローラ10aにモータの回転速度を制御させるために、出力信号をコントローラ10aに供給する信号処理装置10bとを具備する。
(もっと読む)
電動機の制御装置及び方法
【課題】シート送り装置のスリップ及びバックラッシュを抑制し、かつ、シートをフィード設定長だけ搬送する電動機制御装置及び方法を提供する。
【解決手段】減算器47が測長ロールパルス数から送りロールパルス数を減算してパルス数偏差を求め、微分器47が時間微分して速度差を求め、BL/SL判別手段が速度差に基づいてバックラッシュ及びスリップの存在を判定する。バックラッシュ補正制御手段50が、パルス数偏差に基づいて、バックラッシュを抑制するための位相補正値を出力し、スリップ補正制御手段が、速度差に基づいて、スリップを抑制するための補正後フィーダ加速時間及びフィーダ減速ゲイン値を出力する。そして、主制御手段44が、位相補正値、補正後フィーダ加速時間及びフィーダ減速ゲイン値を用いてそれぞれ速度指令Qを求める。これにより、バックラッシュ、電動機6´の加速時のスリップ及び減速時のスリップをそれぞれ抑制する。
(もっと読む)
1 - 20 / 45
[ Back to top ]