
Fターム[5H501PP00]の内容
電動機の制御一般 (20,975) | 電動機と負荷との伝達装置 (143)
Fターム[5H501PP00]の下位に属するFターム
Fターム[5H501PP00]に分類される特許
1 - 11 / 11
ターニングシステム及びターニング方法
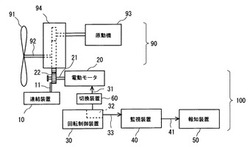
【課題】潮流に起因するターニング用の電動モータの破損の可能性を正確に検知できるターニングシステムを提供する。
【解決手段】ターニングシステム100は、減速機94を介して船舶の推進軸92を回転させるターニング用の電動モータ20と、電動モータ20に供給される電流値が電動モータ20にかかる負荷に応じて自動的に変化するように、電動モータ20に供給される供給電源31の電圧及び周波数を一定にして電動モータ20を一定の回転速度に維持するよう制御する回転制御装置30と、電動モータ20に供給される電流値又は電力値が一定以下になると警告信号41を生成し送信する監視装置40と、監視装置40が送信した警告信号41を受信すると報知する報知装置50と、を備えている。
(もっと読む)
ロボットアームの回転駆動装置

【課題】減速機の回転軸の位置決め精度を高めると共に、トルク制御によってロボットアームの振動を抑制し、静定時間を短縮する。
【解決手段】第1の角度検出部10Aは、サーボモータ1の回転軸の回転角度を検出し、その検出結果を減速機13の減速比Nで除算して得られる第1の回転角度値θmを出力する。第2の角度検出部17Aは、減速機13の回転軸の回転角度を検出し、その検出結果である第2の回転角度値θgを出力する。トルク計算部25は、第1の回転角度値θmと第2の回転角度値θgとの角度差θdiffに減速機13のねじり剛性Kを乗算して、減速機13の回転軸に作用するトルク値Tを算出する。角度制御部24は、角度指令値θgrefと第2の回転角度値θgとの差分に基づいてトルク指令値Trefを生成する。トルク制御部26は、トルク指令値Trefとトルク値Tとの差分に基づいて電流指令値Irefを生成する。
(もっと読む)
モータ制御装置
【課題】使用者が遊び感覚等で電源投入と切断の操作を繰り返しても、モータの発熱(温度上昇)を抑えて、モータの寿命低下や故障を未然に防止できるようにする。
【解決手段】電源投入後の初期駆動時に、モータ12の通電相の切り換えを所定のタイムスケジュールで一巡させてエンコーダ46の出力信号のエッジをカウントし、初期駆動終了時のエンコーダカウント値とロータの回転位置と通電相との対応関係を学習し、その後の通常駆動時に、エンコーダカウント値と初期駆動終了時の学習結果に基づいて通電相を決定する。初期駆動終了後は所定の禁止期間が経過するまで初期駆動の実行を禁止し、使用者が遊び感覚等で電源投入と切断の操作を繰り返しても、初期駆動が繰り返し実行されることを未然に防止する。初期駆動終了後、禁止期間内に電源切断操作が行われても、メインリレー51を切断せずにレンジ切換制御装置42への電源供給を継続する。
(もっと読む)
サーボ制御装置
【課題】送り機構のボールスクリューが経年変化や温度変化で伸縮してボールスクリューの軸方向に沿う剛性が変化しても、このような剛性変化を補償して、テーブルの位置を正確にサーボ制御する
【解決手段】制御部100は、サーボモータ40をフィードバック制御して、負荷であるテーブル02をサーボ制御する。逆特性モデル300は、機械系の動的誤差を補償する速度補償信号V300を求めて、フィードフォワード補償制御をする。剛性変化補償部400は、ボールスクリュー30のネジ部31の軸方向に沿う剛性が変化したら、この剛性変化に応じて、逆特性モデル300の補償制御用伝達関数に含まれているネジ部の軸方向に沿う剛性値を変化させる。
(もっと読む)
電動パワーステアリング装置
【課題】より適切なフィードバックゲインの変更を可能として良好な操舵フィーリングを維持しつつ静粛性の向上を図ることのできる電動パワーステアリング装置を提供すること。
【解決手段】起振力を有した変動成分を含む信号(操舵トルクの検出信号等)について、その変動成分に対応する特定の周波数成分を抽出する。そして、その周波数成分の強度Aに応じて、電流フィードバック制御の各ゲイン(Kp,Ki)を変更する。
(もっと読む)
モータ制御装置、電動パワーステアリング装置及び車両用操舵装置
【課題】簡素な構成にて、過電流の発生が回路に与える影響を有効に排除することが可能なモータ制御装置、電動パワーステアリング及び車両用操舵装置を提供すること。
【解決手段】プリドライバ22の給電線Lp2には、電源遮断手段としてのリレー回路40が設けられる。そして、同リレー回路40は、マイコン21の出力するリレー信号S_rlyにより、その作動が制御される。
(もっと読む)
回転機械システム
【課題】回転機械システムとして、回転機械と電動機とを接続する動力伝達機構の異常を適切に検出することである。
【解決手段】回転機械システム10は、一般的に送風機と呼ばれる部分を構成する送風機本体20と電動機30と、送風機と呼ばれる部分の異常を検出する制御部50とその表示を行う表示部60を含む。駆動電流検出センサ38は、電動機30の駆動電流について、電動機30の無負荷電流以上であり、送風機本体20の吸込口22を閉じたときの回転機械無負荷時負荷電流以下の範囲内で予め任意に設定された電流閾値以下になったことを検出し、これによって動力伝達機構であるベルト36の切断を検出する。
(もっと読む)
モータ制御装置
【課題】始動時の初期診断時間を短縮することができるモータ制御装置を提供する。
【解決手段】イグニッションOFFとなったとき、操舵補助制御を中止し、電動モータ12の温度tが所定温度t1以下となるまで、電源を自己保持して電動モータ12の温度推定処理を継続する。このとき、電源リレー回路33をオフ状態として電動モータ12を強制駆動し、電源安定化用コンデンサの電圧Vrが規定電圧VrTH以下であって、且つ電動モータ12の温度tが所定温度t1以下となった時点で電源自己保持機能をオフ状態とする。
(もっと読む)
モータ制御装置
【課題】回転角推定演算の開始後速やかに妥当な推定回転角を得ることができ、これによって、モータを適切に制御することができるモータ制御装置を提供する。
【解決手段】回転角推定部25は、誘起電圧を外乱として検出する外乱オブザーバからなる誘起電圧オブザーバを有する。誘起電圧オブザーバは、内部変数を更新しながら、推定誘起電圧を演算する。この推定誘起電圧に基づいて、モータ1の回転角が推定される。誘起電圧推定部26は、モータ方程式に従って誘起電圧を推定する。初期値決定部27は、その推定された誘起電圧に基づいて、前記内部変数の初期値を決定する。回転角推定部25の誘起電圧オブザーバは、その初期値を用いて誘起電圧推定演算を行う。回転角推定部25が求めた推定回転角を制御回転角θ^として用いて、モータ1が制御される。
(もっと読む)
モータを用いた駆動系の捩り振動制振制御方法
【課題】機差に応じた補正を行って効果的な捩り制振を行う方法を提供する。
【解決手段】動力源から車輪に到る駆動系にモータが含まれるとともに、その駆動系を捩り振動系としてモデル化した捩り振動モデルにおける捩り振動を抑制するために予め用意した数式モデルに基づいて前記モータをフィードフォワード制御することにより前記駆動系における捩り振動を抑制する、モータを用いた駆動系の捩り振動制振制御方法において、前記捩り振動系における前記モータを除いたいずれかの回転角度を基準とし、その基準となる回転角度の変化量に対する前記モータの回転角度の変化量の比の設計値と実測値との偏差Δαを求め、その偏差に基づいて、前記数式モデルにおける捩り変位を抑制する係数の設定値を補正する。
(もっと読む)
ギャップを調整するための方法および制御回路
製品が供給されるときに通るギャップを調整するための方法において、回転部材が予め定められたトルクによって駆動され、回転部材(110a、130)が停止するまで、回転部材が、ギャップ内に配置されている製品に対して移動される。  (もっと読む)
(もっと読む)
1 - 11 / 11
[ Back to top ]