
Fターム[5H501PP02]の内容
電動機の制御一般 (20,975) | 電動機と負荷との伝達装置 (143) | 歯車 (78)
Fターム[5H501PP02]に分類される特許
1 - 20 / 78
回転駆動装置及びロボット装置
【課題】高度な制御が実現でき、産業ロボット等に好適な回転駆動装置を提供する。
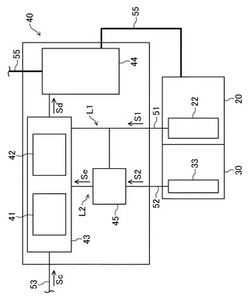
【解決手段】トラクション方式の減速機30や指令信号に基づいてモータ20の出力を制御する駆動制御機構40を備えた回転駆動装置10である。減速機30の入力側に第1ロータリエンコーダ22、減速機30の出力側に第2ロータリエンコーダ33を有している。駆動制御機構40は、指令信号Scと第1検出信号S1とに基づいてモータ20の出力を制御する制御信号Sdを生成する出力制御部43、制御信号Sdに従うドライバ44、第1検出信号S1と第2検出信号S2とを比較して、減速機30の入力と出力との間の誤差を演算する誤差演算部45を有している。出力制御部43が誤差演算部45の演算結果に基づいて制御信号Scを補正する。
(もっと読む)
モータ制御装置、歩行補助装置及びモータ制御方法

【課題】モータコイルの過熱を防止するモータ制御装置において、コイル温度が上限を超えないことを保証しつつ、コイル温度の上限を保証上限温度に十分近い値に設定して、コイル電流の制限に因るモータ性能の低下を抑止する。
【解決手段】上限電流算出部15は、温度センサ6u,6v,6wが検出した各相コイルの温度に基づいて各相において第1の所定時間後のコイル温度が上限温度以下に留まる上限値を、第1の所定時間より短い第2の所定時間の経過ごとに算出する。ベクトル処理部16は、目標コイル電流に対応する目標ベクトルの長さを、上限電流算出部15が算出した各相の上限値の内の最小のものに対応する長さ以内になるように補正する。相電流変換部17は、補正後の目標ベクトルに基づいて各相電流値を算出し、インバータ3を介してモータ2の各相電流を制御する。
(もっと読む)
駆動装置
【課題】モータの制御性を高くすることや車両の挙動をより適正なものとする。
【解決手段】カットオフ周波数Fc以上の周波数成分を減衰させるローパスフィルタ処理を電流センサにより検出されたバッテリの充放電電流Ibに施して得られるフィルタ後電流FIbをモータの制御に用いるものにおいて、モータの回転数Nmが昇圧コンバータを含む回路の共振回転数領域(下限回転数N1〜上限回転数N2の領域)外のときには(S110)、所定周波数Fc1をカットオフ周波数Fcに設定する(S120)。一方、モータの回転数Nmが共振回転数領域内のときには(S110)、所定周波数Fc1より小さな所定周波数Fc2または所定周波数Fc3をカットオフ周波数Fcに設定する(S130〜S150)。
(もっと読む)
異常検出装置
【課題】 サーボモータによって駆動される被駆動部の異常部位を特定可能な異常検出装置を提供する。
【解決手段】 本発明の異常検出装置は、サーボモータの位置情報が位置検出器から入力される入力部と、位置情報を周波数変換する周波数変換部と、周波数変換された所定周波数における振幅と被駆動部の異常を判定する閾値とを比較する比較判定部と、を有し、比較判定部は、所定周波数における振幅が被駆動部の異常を判定する閾値以上となる周波数から被駆動部の異常部位を特定する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】通電不良の発生に伴う二相駆動時のモータ回転を円滑化して安定的に高い出力性能を確保することのできるモータ制御装置及び電動パワーステアリング装置を提供すること。
【解決手段】マイコンは、所定のサンプリング周期で取得した各電流センサの出力信号に基づいて、モータの各相電流値を検出する。そして、今回の検出値とともに少なくとも前回の検出値が保持される。そして、当該二相駆動時には、今回の電流検出時における回転角と前回の電流検出時における回転角との間に漸近線に対応する所定の回転角を挟む場合には、その保持された今回の検出値及び前回の検出値について、その絶対値がより大きな値となるように補正する。
(もっと読む)
モータ制御装置およびこれを備える電動パワーステアリング装置
【課題】算出するモータの抵抗値と実際のモータの抵抗値との差をより短い期間で小さくすることのできるモータ制御装置、およびこれを備える電動パワーステアリング装置を提供する。
【解決手段】この電動パワーステアリング装置は、ステアリングの操舵状態が保舵状態のとき、過去に算出したモータ抵抗値Rmに応じて算出されるフィルタ値Rfを用いたフィルタ処理により、モータ抵抗値Rmを算出する。また、前回の保舵状態において算出したフィルタ値Rfである前回フィルタ値Rfoldを今回の保舵状態において算出されるモータ抵抗値Rmに反映する補正係数Gを、回転状態のときの電流積算値に基づいて変更する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】演算用モータ抵抗値の算出精度を向上させることができるモータ制御装置及び電動パワーステアリング装置を提供する。
【解決手段】モータ12を制御するECU11は、モータ12に流れる電流検出値Ieを検出する電流値検出部31と、モータ12に印加される端子間電圧Vtを取得する入力電圧設定部37と、電流検出値Ie及び端子間電圧Vtに対してフィルタ処理を施すフィルタ部40と、モータ12で発生する誘起電圧Eを算出する誘起電圧推定部43と、デューティ比微分値ΔDを算出する変化量算出部41と、フィルタ後電圧値Vtfをフィルタ後電流値Iefで除算してモータ12の今回の抵抗算出値Re(n)を求める抵抗算出部72と、誘起電圧Eが基準値以下であると共に、デューティ比微分値ΔDが基準変化量以下である場合に、今回の抵抗算出値Re(n)に基づき今回の演算用モータ抵抗値R(n)を設定する抵抗設定部73と、を備える。
(もっと読む)
ショベル
【課題】電動発電機の異常をより柔軟に検出可能なショベルを提供すること。
【解決手段】本発明に係るハイブリッド式ショベルは、エンジン11により発電機として駆動される電動発電機12を備えるショベルであって、電動機として機能する電動発電機12の入力を表す入力物理量を取得する入力物理量取得部300と、入力物理量取得部300が取得する入力物理量に対応する、電動機として機能する電動発電機12の出力を表す出力物理量を取得する出力物理量取得部301と、出力物理量に対する入力物理量の割合に基づいて電動発電機12の異常を検出する電動発電機異常検出部302とを備える。
(もっと読む)
車両用の電動式ブレーキ装置
【課題】車両用の電動式ブレーキ装置において、電気モータの長寿命化を図る。
【解決手段】車両用の電動式ブレーキ装置は、アクセルペダルが操作量減少側に移動している際の速度であるアクセル減少速度を検出するアクセル減少速度検出手段(ステップ108)と、アクセル減少速度検出手段により検出されているアクセル減少速度が小さいほど電気モータに小さな電流を通電して、ブレーキ操作部材が操作される前に制動部材と被制動部材との隙間を第1隙間所定値になるまで小さくするモータ制御手段(ステップ108〜112,124)と、を備えている。
(もっと読む)
電動パワーステアリング装置
【課題】操舵系にアシスト力を付与するモータについて、その抵抗値を精確に算出することのできる電動パワーステアリング装置を提供する。
【解決手段】この電動パワーステアリング装置は、電流値Imおよび電圧値Vmに基づいて外乱オブザーバにより推定誘起電圧EXaを算出する。そして、推定誘起電圧EXaが所定範囲内にあるとき電流値Imおよび電圧値Vmに基づいて抵抗値を算出する。さらに、最後に取得した電圧値Vmよりも前に取得した電圧値Vm(過去電圧値)および最後に取得した電流値Imよりも前に取得した電流値Im(過去電流値)に基づいて外乱オブザーバの演算式を補正する。
(もっと読む)
自動扉制御装置、自動扉システム、自動扉制御方法及び自動扉調整方法
【課題】自動扉が傾いた場所に設置された場合であっても、扉の開動作及び閉動作を所定の時間で行うことができる自動扉制御装置、自動扉システム、自動扉制御方法及び自動扉調整方法を提供する。
【解決手段】モータ駆動装置29の駆動制御部41は、カウンタ部44の記憶部Cnt2A、Cnt2B、Cnt4に予め設定された切替条件に従って、移動速度を切り替えながら自動扉の開又は閉動作を行い、自動扉の移動開始位置から移動停止位置までの移動時間をタイマ部45にて測定する。測定した移動時間が仕様などに規定された所定時間より短い/長い場合、減速開始点補正部46にて自動扉の高速移動から減速移動への切り替えを早める/遅らせるよう、切替条件の変更を行う。
(もっと読む)
駆動制御装置、画像形成装置、駆動制御方法及びプログラム
【課題】起動時において、機構のバックラッシュ等のギヤの噛合いで生じる衝撃によってエンコーダ等の検出系が加振され、機構の速度や位置が誤検出された場合であっても、フィードバック制御系が安定となるような駆動制御装置、画像形成装置、駆動制御方法及びプログラムを提供すること。
【解決手段】電動機と、前記電動機の出力を伝達する伝達機構部と、前記伝達機構部に連結することで前記電動機の出力により駆動される従動機構部と、前記電動機、前記伝達機構部又は前記従動機構部のいずれか1つの速度又は位置を検出する検出部と、前記検出部の出力値と目標値との偏差の値に基づき、補償器を用いて所定の演算を行う補償器演算部と、前記補償器演算部の結果に基づいて前記電動機を駆動させる電動機駆動部と、を有する駆動制御装置であって、前記補償器演算部に入力する前記偏差の値に制限をかける偏差制限部を有する駆動制御装置によって解決される。
(もっと読む)
車両用モータ制御装置
【課題】車両の共振周波数を解消できる車両用モータ制御装置を提供する。
【解決手段】各種センサ7からの車両の状態量に応じて第1のトルク指令値Trefを生成する車両制御装置1と、走行用モータ3の電気角ωから検知できるトルクリプル成分の中で車両共振を発生させる周波数成分を車両共振成分抽出フィルタ24で抽出し、その周波数成分に対してフィードバック制御を行うための共振補償値である第2のトルク指令値Tcmpを生成する車両共振補償演算部23と、第1のトルク指令値Trefから第2のトルク指令値Tcmpを減算してトルク指令値Tref_cmpを生成する加算器20とを備え、当該トルク指令値により走行用モータ3を制御する。これにより、走行用モータ3のトルクリプルによる車両の共振が抑制できる。
(もっと読む)
ロボット駆動テンドンに張力を付与するためのシステムおよび方法
【課題】ワイア駆動において、高張力を少ない電力で実現すること。
【解決手段】テンドン張力付与システムは、近位端および遠位端を備えるテンドンと、アクチュエータと、モーターコントローラとを含む。アクチュエータは、ドライブスクリューおよびモーターを含むことができ、また、テンドンの近位端に連結され、電流に応答してテンドンに張力を付与するように構成される。モーターコントローラは、アクチュエータに電気的に連結され、テンドンにストール張力が達成されるまで、第1の大きさを備える電流をアクチュエータに提供するように構成される。また、モーターコントローラは、ストール張力の達成に続いてアクチュエータにパルス電流を提供するように構成される。パルス電流の大きさは、第1の大きさよりも大きい。モーターコントローラはさらに、パルス電流の終了に続いて、モーターを安定状態保持電流に戻すように構成される。
(もっと読む)
制御弁の制御装置
【課題】電動アクチュエータから制御弁に付与される駆動力が微小変動するような状況を少なくし、電動アクチュエータの構成部品の磨耗や劣化の進行を抑制する。
【解決手段】電動アクチュエータ12によって駆動される制御弁10は所定の開度に付勢されている。その開度を制御する制御ユニット21は、制御弁10の目標開度と検出された開度との偏差に応じてアクチュエータ12を操作する。該偏差の絶対値が所定値よりも小さいという条件を少なくとも含む所定の必要条件が成立している場合に、アクチュエータ11への電源供給を遮断し、目標開度又は検出された開度と上記所定の開度との偏差の絶対値が所定値以上である場合には、アクチュエータ11の電源供給を継続する。
(もっと読む)
可変バルブタイミング制御システムのモータ回転状態検出系異常診断装置
【課題】モータ駆動式の可変バルブタイミング制御システムにおいて、モータ回転状態検出系の異常診断の誤判定を未然に防止する。
【解決手段】エンジンのクランク軸10の回転速度の1/2の回転速度に対してモータ18の回転速度を調整することでクランク軸10に対するカム軸13の回転位相(カム軸位相)を変化させてバルブタイミングを変化させる。モータ18を駆動するEDU23は、モータ回転位置に応じた位置信号とモータ回転方向に応じた方向信号をECU22に出力する。モータ回転速度が小さくなると、位置信号や方向信号のエッジを検出できないためにモータ回転状態検出系の異常診断を誤判定する可能性がある。この対策として、ECU22は、カム軸位相変化速度とエンジン回転速度に基づいてモータ回転速度を推定し、モータ回転速度が0付近の所定範囲内にあるときに異常診断を禁止する。
(もっと読む)
回転角度検出装置
【課題】回転数が低い場合でも回転数の変動を抑制できるようにする。
【解決手段】制御装置60(回転角度検出装置)は、回転電機40(回転部材)の回転に伴って信号を出力するレゾルバ41と、レゾルバ41から出力される信号に基づいて検出される回転角度を示す検出角度θdの誤差を誤差補正手段65aによって補正する補正実行手段64と、補正された検出角度θdに基づいて検出回転数Nsを算出する回転数算出手段63と、検出回転数Nsが指令された指令回転数N*となるようにフィードバック制御を行う回転数フィードバック制御手段61と、検出回転数Nsおよび指令回転数N*のうちで一方または双方の回転数に基づいて補正実行手段64による補正を行うか否かを判断する補正実行判断手段62とを備える。補正実行手段64は、補正実行手段64による補正を行うと判断された場合にのみ検出角度θdの誤差を補正する。
(もっと読む)
電動パワーステアリング装置
【課題】新たに設定されるモータ抵抗と実際のモータの抵抗との乖離を小さくすることのできる電動パワーステアリング装置を提供する。
【解決手段】この電動パワーステアリング装置は、操舵系にアシスト力を付与するモータを備え、このモータの抵抗を示す値であるモータRm抵抗を更新する。具体的には、モータの誘起電圧EXが第1判定値GAよりも小さいことに基づいて、モータ抵抗Rmを更新する。また、誘起電圧EXが第2判定値GBよりも小さいとき、モータ電圧Vmをモータ電流Imにより除算した値である除算値を新たなモータ抵抗Rmとして設定する。
(もっと読む)
モータ制御システム
【課題】車両に搭載される同一定格出力の2つのモータを全領域で効率よく駆動させる。
【解決手段】モータ制御システム1のECU8は、記憶部9とCPU10とを有する。記憶部9には、第1及び第2モータ4a,4bの全体としての効率に基づいて予め設定された低トルク領域、中トルク領域及び高トルク領域の境界を示す境界トルクTx,Tyが記憶される。CPU10の判定部12は、要求トルクTnと境界トルクTx,Tyとを比較して、モータ回転数Nと要求トルクTnとが属する領域を判定する。CPU10の制御部13は、判定された領域が低トルク領域の場合には、第1モータ4aのみを駆動し、中トルク領域の場合には、第1モータ4aが最大トルクを出力する状態で第1及び第2モータを駆動し、高トルク領域の場合には、第1及び第2モータを同等に駆動する。
(もっと読む)
モータ制御装置
【課題】モータ停止中において、モータの推定温度の算出処理に掛かる作動電力の低減を図ることができるモータ制御装置を提供する。
【解決手段】パワーウインドウ装置において、モータ停止中にイグニッションスイッチ信号がOFF信号になると、制御部の作動モードを通常作動モードからスリープモードへ切り替え、スリープ制御回路からのウェイクアップ信号を受けとると、アクティブ時間だけアクティブ状態に復帰した後に再び自動的にスリープ状態に移行し、外部からウェイクアップ信号を受けとると、作動モードをスリープ状態から通常作動モードに切り替える。また、スリープモードにおいてアクティブ状態に復帰する間に、推定温度算出手段が、減算温度データに基づいて、推定温度記憶手段に記憶された推定温度に対応する減算温度にて当該推定温度を補正して新たに算出し、推定温度記憶手段に記憶した推定温度を、新たに算出した推定温度に更新する。
(もっと読む)
1 - 20 / 78
[ Back to top ]