
Fターム[5H505GG08]の内容
交流電動機の制御一般 (51,584) | 制御系 (3,480) | ループゲインを調節するもの (89)
Fターム[5H505GG08]に分類される特許
1 - 20 / 89
モータ制御装置
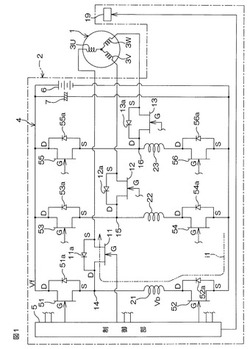
【課題】スイッチング損失およびサージ電圧を抑制しつつ、小型化、および製造コストの低減化を達成することのできるモータ制御装置を提供する。
【解決手段】第1のFET51と第2のFET52との接続点14が、第1のリレー11を介して電動モータ1のU相界磁巻線3Uに接続されている。接続点14と第2のFET52との間に第1のインダクタ21が接続されている。制御部5は、第1のリレー11に回生電流i1が流れているときに、第1のリレー11をターンオフする。これにより、第1のインダクタ21に、回生電流i1の変化を妨げる方向に誘起電圧Vbが生じる。この結果、第1のFET51のソース電位が高くなるので、第1のFET51に端子間電圧が低減される。第1のFET51に端子間電圧が低減した状態で、第1のFET51がターンオンされる。
(もっと読む)
回転電機制御システム

【課題】回転電機制御システムにおいて、電流センサの検出電流値に誤差が重畳している場合でも、過電流及び過電圧の発生を有効に防止することである。
【解決手段】回転電機制御システム10は、回転電機であるモータジェネレータMG2と、リアクトル20を含むDC/DCコンバータ14と、DC/DCコンバータ14に接続された平滑コンデンサC1,C2と、予め設定されたPWM条件下で電流フィードバックを用いるPWM制御方式でインバータ16を制御する制御部18とを含む。制御部18は、LC共振回路の共振周波数領域の周波数とモータジェネレータMG2のパワー変動の周波数とが一致したときに、PWM制御で電流フィードバックを行う場合のフィードバックゲインを、通常時に使用する通常時ゲインよりも低下させるゲイン低下部であるゲイン決定部30を有する。
(もっと読む)
同期機制御装置
【課題】同期機や電力変換手段等の状態に応じて、適切な運転目標指令を生成し、運転目標を満足する制御指令を生成する。
【解決手段】トルク指令と回転速度と運転目標指令とに基づいて、電機子鎖交磁束指令とトルク電流指令を生成する制御指令生成器10を、トルク指令またはトルク電流指令に基づき第1の磁束指令を生成する第1の磁束指令生成器21と、トルク指令またはトルク電流指令と同期機1の回転速度とに基づき第2の磁束指令を生成する第2の磁束指令生成器22と、運転目標指令に基づき第1および第2の磁束指令の2つの磁束指令の配分比に相当する配分係数を設定する指令配分設定器23と、2つの磁束指令と配分係数に基づき電機子鎖交磁束指令を出力する磁束指令調整器24と、トルク指令と電機子鎖交磁束指令とに基づきトルク電流指令を生成するトルク電流指令生成器25により構成する。
(もっと読む)
モータ制御装置およびモータ制御方法
【課題】パルス幅変調制御方式によるPWM制御モードと、矩形波制御方式によるワンパルス制御モードとを有するモータ制御装置において、パルス幅変調制御方式と矩形波制御方式とを通じて適切に電流オフセットを抑制できるようにする。
【解決手段】低周波成分抽出部151は、インバータ168がモータMに供給する電流のうち低周波成分を抽出する。また、ゲイン設定部140は、低周波成分抽出部151が抽出した低周波成分に作用させるゲインを、PWM制御モードにおけるゲインが、ワンパルス制御モードにおけるゲインよりも小さくなるように設定する。そして、オフセット補正部165は、低周波成分抽出部151が抽出した低周波成分に、ゲイン設定部140が設定したゲインを作用させて得られるオフセット補正指令値に基づいて、インバータ168がモータMに供給する電流のオフセットを低減させるオフセット補正を行う。
(もっと読む)
電動パワーステアリング装置
【課題】弱め界磁制御によって軽快な操舵フィーリングを保持しつつ、弱め界磁制御が有効ではなくなって無駄な発熱が発生する事象を、モータの駆動状況に応じて回避する電動パワーステアリング装置を提供する。
【解決手段】モータの駆動状況に対応するトルク電流であるq軸電流IqがIq=Iq´に設定されたとき、モータ回転数が増加しないで発熱のみが増加するドットを付けた領域135内に電流ベクトルiを設定しないで、ハッチングで示す使用領域134内で、弱め界磁電流であるd軸電流Idが使用領域134の上限値Idlimとなる電流ベクトルkに設定する。
(もっと読む)
リラクタンス型同期電動機の制御装置
【課題】電動機回転子の磁気的な構造および材質の磁気特性に起因する電流−トルクの非線形領域を回避できる安定した制御性を持つ制御装置を提供する。
【解決手段】
制御装置は、上位制御装置から指令されるトルク指令値に比例するq軸電流振幅値を演算するq軸電流演算部と、前記トルク指令値に比例するd軸電流振幅値を演算するd軸電流演算部と、回転子速度に応じて変化するq軸電流係数、d軸電流係数をそれぞれ演算する速度係数演算部と、q軸電流振幅値とq軸電流係数、d軸電流振幅値とd軸電流係数をそれぞれ乗じることでq軸電流指令値およびd軸電流指令値とを算出し、d軸電流指令値に基づいた三角形補償関数又は台形補償関数によりq軸電流補償値を演算するq軸電流補償値演算部と、算出されたq軸電流補償値をq軸電流指令値に加算した補償後q軸電流指令値を出力する出力部と、を備える。
(もっと読む)
モータ制御装置
【課題】加速・減速や負荷トルク変動を含む広い動作領域で、磁束指令に対する磁束の追従遅れを補正し、所定のトルクを出力させ、加速性能および制御性能の向上が図れるモータ制御装置を得ること。
【解決手段】外部から入力される磁束指令Φcomと磁束推定部8が推定した推定磁束ΦSとの偏差が小さくなるようにする励磁電流指令を生成する磁束制御器13を備え、誘導モータ1をベクトル制御により駆動制御するモータ制御装置において、磁束指令Φcomに基づいて磁束遅れ補正指令Φhcomを生成する磁束遅れ補償器16aを設け、磁束遅れ補正指令Φhcomは、減算器20において磁束指令Φcomに代えて磁束推定部8が推定した推定磁束ΦSとの偏差を取るのに用いる。
(もっと読む)
同期電動機の制御システム
【課題】
同期電動機を120度通電方式から180度通電方式に切り替える際に、切換速度より小さい速度付近で120通電方式のでは電流位相が進んで力率が悪化する問題があった。停止状態から中高速域に至る広い速度範囲において、トルクショックの小さいシームレス駆動を行うことができる同期電動機の制御システムを提供する。
【解決手段】
同期電動機を120度通電方式で起動し、その後、180度通電方式に切り替えて駆動する制御システムで、120度通電方式から180度通電方式へ切り替える際に、120度通電中の力率を改善する力率改善手段を設け、この力率の改善された120度通電方式から180度通電方式に切り替えて同期電動機を駆動する。
(もっと読む)
交流電動機の制御装置
【課題】過渡電圧飽和に起因して生じ得る電動機の不安定現象を抑制すること。
【解決手段】交流電動機の制御装置は、速度指令を生成する位置制御器と、電流指令を生成する速度制御器と、電圧指令を生成する電流制御器と、q軸電圧方程式の過渡電圧成分に相当するq軸電圧飽和量ΔVqを算出するdi/dtリミッタ部と、q軸電圧飽和量ΔVqを用いて位置指令修正量ΔPを生成する飽和量F/B部105と、を備える。また、この飽和量F/B部105は、q軸電圧飽和量ΔVqを通過させ、その出力の換算値を位置指令修正量ΔPとして位置制御器の入力側にフィードバックするLPF121と、電動機の電気回路時定数の逆数相当値をLPF121の帯域を決定するフィルタ定数ωとしてLPF121に設定する帯域設定器122と、を備える。
(もっと読む)
回転機の制御装置
【課題】スイッチング素子の温度が過度に上昇することに起因してスイッチング素子の信頼性が低下することを好適に回避することのできる回転機の制御装置を提供する。
【解決手段】スイッチング素子温度Tthが閾値温度T1を上回ると判断された場合、スイッチング素子温度Tthが高いほど、モータジェネレータの指令トルクTrq*を低下させる。そして、低下させた指令トルクTrq*を1次遅れフィルタに入力する。ここでは、スイッチング素子温度Tthが閾値温度T1を上回ると判断された場合、1次遅れフィルタの時定数Tsを小さく設定する。そして、1次遅れフィルタから出力される指令トルクTrqcに基づき、モータジェネレータの電流フィードバック制御を行う。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】高い静粛性を確保しつつ、より安定的にレゾルバレス制御を実行することのできるモータ制御装置を提供すること。
【解決手段】F/B制御部47は、F/Bゲイン可変制御部80が演算するフィードバックゲインを用いて、トルク偏差Δτに基づくトルクフィードバック制御を実行することにより第1変化成分dθτを演算する。また、F/Bゲイン可変制御部80は、第1変化成分dθτを加算角θaとする「第1の演算モード」、及び第1変化成分dθτを推定モータ回転角速度ωm_eにより補正した値を加算角θaとする「第2の演算モード」の各演算モードに応じて、二種類の異なるフィードバックゲインK1,K2を演算する。そして、第1の演算モードに用いるフィードバックゲインK1は、第2の演算モードに用いるフィードバックゲインK2との比較において、より応答性が高くなるように設定される。
(もっと読む)
モータ制御装置
【課題】モード変更時の電流の急変を防止する。
【解決手段】PI演算部26は、モータ14の出力トルク指令に基づいて算出したモータの電流指令と、実際に計測したモータの実電流の差である電流偏差に基づき、前記電流偏差に比例ゲインを乗算して得た比例項と、前記電流偏差の積分値に積分ゲインを乗算して得た積分項を算出し、得られた比例項および積分項に基づいてモータへの供給電圧指令を算出する。そして、モータの制御モードとして、PWM制御によりリミットの掛かった正弦波出力を得る過変調モードと、PWM制御によって正弦波出力を得るPWMモードと、を有し、過変調制御モードからPWM制御モードに移行する際に、前記電流偏差が大きい場合には、前記比例ゲインを小さく変更する。
(もっと読む)
モータ制御装置
【課題】電流指令値が0(モータ停止)の場合に、出力電流ノイズに起因するモータの振動を抑制する。
【解決手段】モータに流れる電流値とモータの電気角と電流指令値とが入力され、それら電流指令値、電流値及び電気角を用いたフィードバック制御を行うことにより電圧指令値を算出し、その電圧指令値をPWM波形に変換してモータを駆動するインバータを制御するモータ制御信号を生成するモータ制御装置において、電流指令値が0か否かを検知する0指令検知部61を備え、0指令検知部61が0を検知した時、電圧指令値が入力されてモータ制御信号を生成するPWM変換部18’における電圧指令値に対する分解能を粗くする。
(もっと読む)
3相回転機の制御装置
【課題】 2組の巻線組を有する3相回転機の駆動を制御する制御装置において、相電流検出値のみを用いて、インバータまたは巻線組の故障を検出する。
【解決手段】 第1系統インバータ601および第2系統インバータ602は、それぞれ3相モータ80を構成する2組の巻線組801、802に、振幅が互いに同一で、位相が互いに30°ずれる交流電流を供給する。電流検出器701、702は、インバータ601、602から巻線組801、802に通電される相電流を検出する。故障判定手段751、752は、互いに他系統の3相電流検出値に基づいて、自系統の相電流推定値を算出し、電流検出値と比較する。これにより、ECU101は、電流検出器701、702からの情報である相電流検出値のみを用いて、インバータ601、602または巻線組801、802の故障を検出することができる。
(もっと読む)
モータ駆動回路、および、モータ駆動システム
【課題】MCUの限られた数のポートで伝達する情報の種類を増加させる。
【解決手段】モータ駆動回路は、MCU300が出力した信号が入力される第1のポートP1を備え、第1のポートP1を介して入力された入力信号のデューティを測定し、デューティ情報信号を出力するデューティ測定回路100aと、入力信号の周波数を測定し、この測定した周波数に応じた周波数情報信号を出力する周波数測定回路100bと、デューティ情報信号および周波数情報信号の何れか一方に基づいて、MCU300が指令したモータの回転速度を計算し、この計算した回転速度の情報を含む回転速度情報信号を出力する指令速度計算回路100cと、回転速度情報信号と、デューティ情報信号および周波数情報信号の残りの他方により得られた情報とに基づいて、モータを指令された回転数で駆動するためのPWM信号である駆動制御信号を生成するモータ駆動波形制御回路100eを備える。
(もっと読む)
電動車両
【課題】電動機の回転軸の回転角を検出するセンサに角度ズレが生じていても、電動機の予期しない回生制動を回避して、二次電池の過充電をより確実に抑止する。
【解決手段】d軸にマイナス方向の電流Idを流すと共にq軸に電流が流れないように電流指令Id*,Iq*を設定してモータを制御する際には、制御に用いる回転角センサからの回転角θをモータの正転時には逆転方向に補正し、モータの逆転時には正転方向に補正することにより、回転角θを回生から力行に向かう方向に補正する。これにより、回転角センサにオフセット誤差が含まれていても、補正した回転角θに基づいてモータMG2を制御することにより、q軸にモータMG2の回転方向とは逆方向の電流が流れない、即ち回生トルクが出力されないようにすることができる。この結果、モータが予期せずに回生するのを防止でき、二次電池の過充電を抑止することができる。
(もっと読む)
モータ駆動装置、およびこれを用いた電動パワーステアリング装置
【課題】 製造時に電流制限値マップを作成するための工数を少なくし、かつ実使用時に電流制限値を変更可能なモータ駆動装置を提供する。
【解決手段】 スイッチング素子の電流制限値を変更する場合、素子温度Tが時刻t1での素子温度T1から第1目標温度T01まで変化するのに必要な温度到達時間P1、および電流制限値Eが時刻t1での電流制限値E1から第1目標電流制限値E01まで変化するのに必要な電流到達時間P2が算出される(S103)。次に、温度到達時間P1と電流到達時間P2との大小を判定する。(S104)温度到達時間P1が電流到達時間P2以下の場合、スイッチング素子の電流制限値を変更する。(S105)これにより、モータ駆動装置の製造時に電流制限値マップを作成することなく、時刻t1での素子温度T1に基づいて、スイッチング素子の状態に応じた電流制限値に変更することができる。
(もっと読む)
電動機駆動システム
【課題】ダイオードコンバータを採用した際に、圧延機の噛み込み時に電動機に急激な負荷が加わる際の電動機一次電圧の飽和を避けることができるとともに、電圧飽和の影響によるインバータの制御不安定又はトリップを防ぐ。
【解決手段】電動機11と、インバータの直流電源であるダイオードコンバータ22と、インバータを用いて電動機11を可変速制御し、且つ界磁弱め制御を行う電動機制御装置23と、電動機制御装置23により出力される一次電圧を検出する一次電圧検出部13と、要求されるインバータの変調率の変動が予測される場合に、変動のタイミングと変動量とを検出する変調率変動検出部と、変調率変動検出部により検出された変調率の変動量に基づいて一次電圧の変動量を算出する補正電圧部25とを備え、電動機制御装置23は、変動のタイミングに合わせ、一次電圧とその変動量とに基づいて界磁弱め制御を行う際のd軸界磁電流抑制分を算出する。
(もっと読む)
モータ制御装置
【課題】電圧指令値の制限を行っても応答性および追従性を低下させることなく、制御動作も安定なモータ制御装置を提供する。
【解決手段】PI演算値を演算するためのPI制御部と、モータの非干渉化制御のための非干渉化制御量を演算するための非干渉化制御量演算部と、PI制御手段により演算されたPI演算値と、非干渉化制御量演算部により演算された非干渉化制御量とを加算する加算部と、加算部の加算結果を制限し、制限した制御量をモータ電圧指令値として出力するリミッタと、モータの回転角速度と所定のゲインマップに基づき、目標電流ゲインを演算するゲイン演算部とを備え、ゲイン演算部によって演算された目標電流ゲインをdq軸目標電流に乗じて、モータのdq軸目標電流を制限する。
(もっと読む)
モータ制御装置
【課題】電圧指令値の制限を行っても応答性および追従性を低下させることなく、制御動作も安定なモータ制御装置を提供する。
【解決手段】PI演算値を演算するためのPI制御部と、モータの非干渉化制御のための非干渉化制御量を演算するための非干渉化制御量演算部と、PI制御手段により演算されたPI演算値と、非干渉化制御量演算部により演算された非干渉化制御量とを加算する加算部と、加算部の加算結果を制限し、制限した制御量をモータ電圧指令値として出力するリミッタと、モータ電圧指令値とPI制御部によって演算されたPI演算値とから電圧指令値ゲインを演算するゲイン演算部とを備え、ゲイン演算部によって演算された電圧指令値ゲインまたはdq軸ゲインマップから求めた電流制限ゲインをdq軸目標電流に乗じて、モータのdq軸目標電流を制限する。
(もっと読む)
1 - 20 / 89
[ Back to top ]