
Fターム[5H505LL02]の内容
交流電動機の制御一般 (51,584) | 検出変量、検出手段 (8,979) | 速度の検出 (1,620) | アナログ値で検出するもの (110)
Fターム[5H505LL02]の下位に属するFターム
TGを用いるもの (16)
セルシンを用いるもの (3)
ホール素子を用いるもの(アナログ) (33)
Fターム[5H505LL02]に分類される特許
1 - 20 / 58
モータ駆動装置及びモータ駆動装置の制御方法
【課題】キャリア三角波に同期した正弦波状のレゾルバ励磁信号を生成することが可能なモータ駆動装置、及びモータ駆動装置の制御方法を提供する。
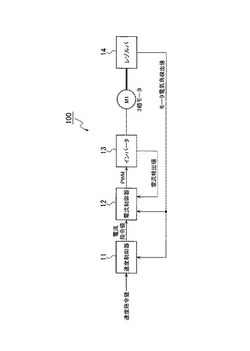
【解決手段】PWM変調したモータ電流を3相モータM1に供給するインバータ13と、3相モータM1に流れる電流を検出する電流検出センサとを備え、レゾルバ14を用いて3相モータM1の電気角を検出する。そして、PWM変調に用いるキャリア三角波の周期が変更された場合には、この周期の変更に伴ってレゾルバ14に供給するレゾルバ励磁信号を生成するための励磁信号指令値、及び励磁信号生成用三角波の周期を変更する。そして、これらの励磁信号指令値、及び励磁信号生成用三角波を用いてレゾルバ励磁信号を生成するので、キャリア三角波の谷とレゾルバ励磁信号のピークを合わせることができ、電流リップルを抑制し高精度な電流制御が可能となる。
(もっと読む)
モータ制御装置

【課題】電圧指令値の制限を行っても応答性および追従性を低下させることなく、制御動作も安定なモータ制御装置を提供する。
【解決手段】PI演算値を演算するためのPI制御部と、モータの非干渉化制御のための非干渉化制御量を演算するための非干渉化制御量演算部と、PI制御手段により演算されたPI演算値と、非干渉化制御量演算部により演算された非干渉化制御量とを加算する加算部と、加算部の加算結果を制限し、制限した制御量をモータ電圧指令値として出力するリミッタと、モータの回転角速度と所定のゲインマップに基づき、目標電流ゲインを演算するゲイン演算部とを備え、ゲイン演算部によって演算された目標電流ゲインをdq軸目標電流に乗じて、モータのdq軸目標電流を制限する。
(もっと読む)
モータ制御装置
【課題】電流によるインダクタンス変動に追従した電流指令を生成して、トルク制御の精度を向上させる。
【解決手段】電流指令ベクトルの向きを示す電流位相角βrefとトルク指令Trefとを入力し、電流位相角βrefの示す方向を向く複数の電流指令ベクトルのうち、トルク指令Trefに対応する総合トルクを発生させ得る電流指令ベクトルを示すd軸電流指令Id及びq軸電流指令Iqを生成する電流指令生成部24を備え、モータに流れる電流値に応じて変化するd軸及びq軸のインダクタンス(Ld,Lq)を電流値Iaに関連付けたインダクタンス情報Da3を予め設定しておき、d軸及びq軸の電流指令(Id,Iq)を生成するにあたり、既に出力したd軸及びq軸の電流指令(Id,Iq)によってモータに流れたとみなせる電流値Iaに対応するd軸及びq軸のインダクタンス(Ld,Lq)を用いてd軸及びq軸の電流指令(Id,Iq)を生成する。
(もっと読む)
モータ制御装置
【課題】試験体を回転させるモータの回転数の制御の精度を向上させることが可能なモータ制御装置を提供する。
【解決手段】レゾルバ34及びエンコーダ35は、モータ33の回転数を検出する。トルクメータ36は、モータ33のトルクを検出する。フィードバック制御部23は、目標の回転数と目標のトルクとを示すパラメータマップに従って、目標の回転数でモータ33が回転するように、又は、目標のトルクをモータ33が出力するように、レゾルバ34によって検出された回転数、及びトルクメータ36によって検出されたトルクに基づいて、モータ33の動作をフィードバック制御し、トルクの変動幅が閾値以上となる場合、レゾルバ34によって検出された回転数とエンコーダ35によって検出された回転数とから求められる回転数に基づいて、モータ33の動作をフィードバック制御する。
(もっと読む)
モータ駆動制御装置とモータ駆動方法
【課題】三相モータを高速且つ高トルクで駆動可能とする。
【解決手段】三相モータ30の各相の電流から、マグネットトルク電流iqrとリラクタンストルク電流idrとを求めてフィードバック制御を行う。この際、回転角センサ109の測定した回転角θに、制御システムの遅れに相当する回転角を所定の角度deg分加算することにより、遅れ補償制御を行い、モータの応答性を高める。さらに、弱め磁束制御を行って、モータの応答性を高める。制御系の遅れは、無駄時間と一次遅れ系の時定数とで近似する。
(もっと読む)
電力変換装置
【課題】電圧利用率の要求が低い領域を電圧利用率の要求が高い領域にして制御することで、制御性能を損なうことなく低損失化を達成できる電力変換装置を提供する。
【解決手段】電力変換装置において、指令トルクTcmd*(要求トルク)と回転数Nとに基づいて指令電圧振幅Vamp*(電圧振幅)を設定する電圧振幅設定手段52aと、偏差トルクΔTに基づいて指令電圧位相Vp*(電圧位相)を設定する電圧位相設定手段52eと、指令電圧振幅Vamp*と指令電圧位相Vp*とに基づいて正弦波領域であっても過変調領域になるよう昇圧する指令昇圧電圧Vconv*(昇圧指令信号)をコンバータ10に伝達する電圧指令設定手段51aとを有する。この構成によれば、電圧利用率の要求が低い領域を電圧利用率の要求が高い領域にして制御するので、全域で制御性能を損なうことなく低損失化を達成することができる。
(もっと読む)
モータ制御装置、モータ制御方法
【課題】レゾルバの検出角度に関わらず検出精度が向上することが可能なモータ制御装置、モータ制御方法を提供することを目的としている。
【解決手段】微分係数が不連続な点を有する角度検出信号を検出して出力する角度検出部12と、検出された角度検出信号の不連続点を検出する不連続点検出部131と、検出された不連続点近傍の角度検出信号を、不連続点以前のランプ波形の角度検出信号に置換して出力する置換部133と、角度検出部の出力信号または置換された出力信号を、基準値と比較し直線近似により制御信号を算出する制御信号算出部134と、を備える。
(もっと読む)
電動ステアリング装置
【課題】運転者にとって期待される安定した修正操舵の実施を可能とする電動ステアリング装置を提供する。
【解決手段】操舵トルクTに基づいて制御装置200Aにより制御されて操舵補助力を発生する電動機を11備えた電動パワーステアリング装置において、操向ハンドルに設けられて、運転者の操作により電気信号を出力する操作スイッチ2aL,2aRと、操作スイッチ2aL,2aRからの電気信号に応じて電動機11を駆動する電流を付加する付加電流値波形を演算して出力する付加電流演算部300Aと、を備えている。付加電流演算部300Aは、操作スイッチ2aL,2aRの運転者によるオン状態の時間の長短に関わらず、1回の操作に応じて、車両の走行状態情報に応じた所定の付加電流値IAdの電流波形を生成して出力する。
(もっと読む)
ハイブリッド車両用モータ制御装置
【課題】モータの運転条件に応じた最適な近似モデルを選定し、選定された最適な近似モデルを利用してモータを制御する電流指令を決定し、制御の剛健性および安定性を確保する。
【解決手段】運転条件に応じて第1、2軸電流を決定する電流指令生成器100、第1、2軸電流と第1、2軸フィードバック電流を利用して第1、2軸電圧を生成する電流制御器、第1、2軸電圧を3相電圧に変換する座標変換器、3相信号を生成する信号生成器、3相電流を生成するPWMインバータ、3相電流の印加を受けて駆動されるモータ、モータの位相を検出するレゾルバを含み、電流指令生成器100は、第1、2軸基準電流を決定する基準電流決定モジュール102、第1、2軸基準電流補正値を決定する基準電流補正値決定モジュール104、第1、2軸基準電流と前記第1、2軸基準電流補正値から第1、2軸電流を決定する電流決定モジュール106を含む。
(もっと読む)
回転角度検出装置
【課題】回転数が低い場合でも回転数の変動を抑制できるようにする。
【解決手段】制御装置60(回転角度検出装置)は、回転電機40(回転部材)の回転に伴って信号を出力するレゾルバ41と、レゾルバ41から出力される信号に基づいて検出される回転角度を示す検出角度θdの誤差を誤差補正手段65aによって補正する補正実行手段64と、補正された検出角度θdに基づいて検出回転数Nsを算出する回転数算出手段63と、検出回転数Nsが指令された指令回転数N*となるようにフィードバック制御を行う回転数フィードバック制御手段61と、検出回転数Nsおよび指令回転数N*のうちで一方または双方の回転数に基づいて補正実行手段64による補正を行うか否かを判断する補正実行判断手段62とを備える。補正実行手段64は、補正実行手段64による補正を行うと判断された場合にのみ検出角度θdの誤差を補正する。
(もっと読む)
永久磁石同期モータの制御方法
【課題】バッテリーの電圧変動を実時間で反映することができ、また、モータ/インバータシステムの電圧利用率を向上させ、車両の燃費向上を図ることのできる永久磁石同期モータの制御方法を提供する。
【解決手段】永久磁石同期モータの制御方法は、永久磁石同期モータの絶対角位置を検出する段階と、永久磁石同期モータの回転速度を算出する段階と、バッテリーの電圧を検出する段階と、バッテリー電圧変動が補償された補償速度を算出する段階と、前記トルク指令と補償速度に対応するd軸電流指令とq軸電流指令を生成する段階と、永久磁石同期モータに流入される3相電流をd軸フィードバック電流とq軸フィードバック電流に変換する段階と、d軸電圧指令とq軸電流指令を算出する段階と、前記d軸電圧指令とq軸電圧指令を3相電圧指令に変換する段階と、永久磁石同期モータの駆動を制御する段階を含む。
(もっと読む)
インバータの制御装置
【課題】違和感のない音色の変化で第1のキャリア周波数と第2のキャリア周波数の切替を行なうことが可能なインバータの制御装置を提供することである。
【解決手段】第1のキャリア周波数Fc1を設定し、交流回転電機26の回転数Nが切替回転数Ntとなったときに、第1のキャリア周波数Fc1とは異なる値の第2のキャリア周波数Fc2に設定変更するキャリア周波数設定変更部46を備えるインバータの制御装置40において、キャリア周波数設定変更部46は、交流回転電機26の回転数Nが切替回転数Ntとなったときの第1のキャリア側帯波Fs1が第2のキャリア側帯波Fs2と一致するようにキャリア周波数の切替を行う手段を有する。
(もっと読む)
電動機駆動装置の制御装置
【課題】交流電動機に供給する電流の指令値に対する界磁調整値が、交流電動機の運転状態に応じて適切な値となるように制御できる電動機駆動装置の制御装置を実現する。
【解決手段】電源電圧を変換して所望のシステム電圧を生成する電圧変換部と、直流電力を交流電力に変換して交流電動機に供給する直流交流変換部と、を備えた電動機駆動装置の制御装置であって、直流交流変換部から交流電動機に供給される電流と電流指令値とに基づいて検出される実界磁調整値ΔIdr、又は界磁調整指令値ΔIdを、対象界磁調整値として取得する対象界磁調整値取得部31と、交流電動機の目標トルクTM及び回転速度ωに基づいて、前記対象界磁調整値の制御目標値である目標界磁調整値ΔIdtを決定する目標界磁調整値決定部32と、前記対象界磁調整値を目標界磁調整値ΔIdtに一致させるようにシステム電圧指令値Vdctを決定するシステム電圧決定部と、を備える。
(もっと読む)
回転電機制御システム
【課題】回転電機制御システムの制御部において、余分な演算処理による負荷を軽減しつつ滑らかに制御モードの切り替えを行うことである。
【解決手段】PWM制御モードと矩形波制御モードのモード切替を滑らかに行いながら回転電機17を制御する回転電機制御システム10において、回転電機17の回転数が所定の回転数閾値よりも小さいときは、PWM制御モード及び矩形波制御モードのそれぞれの制御モードのための演算を行い、回転電機17の回転数が所定の回転数閾値よりも大きいときは、矩形波制御モードのための演算を行い、PWM制御モードのための演算は停止する制御部21を備える。
(もっと読む)
モータドライブシステム
【課題】可変磁束モータの磁束を変化させるための磁化電流を流す際におけるインバータの直流側回路の負担を軽減することのできるモータドライブシステムを提供することにある。
【解決手段】直流電源5から供給される直流電力Vdcを変換し、可変磁束モータ2を駆動するインバータ4を制御する制御部10であって、可変磁束モータ2の磁束を変化させる磁化電流Idを制御するための磁化電流指令値IdRmgを演算し、磁化するために磁化電流Idを流す場合、インバータ4の直流電圧Vdcを昇圧するために、トルク電流Iqを制御するためのトルク電流指令値IqRAVRを演算し、磁化電流指令値IdRmg及びトルク電流指令値IqRAVRに基づいて、インバータ4を制御する。
(もっと読む)
交流電動機の制御装置
【課題】同期PWMおよび非同期PWMを選択的に適用するPWM制御において、両者の選択条件を適切に設定することによって、円滑な交流電動機制御を実現する。
【解決手段】制御装置は、相電圧指令と搬送波との電圧比較結果に基づいてインバータから交流電動機に印加されるパルス幅変調電圧を制御することによって、交流電動機の出力を制御する。制御装置は、交流電動機の回転速度が変動している場合(S210にてYES)、搬送波が極大となる時の相電圧指令の実位相Pと目標位相Ptgtとの位相差ΔPを算出する(S220〜S250)。制御装置は、位相差ΔPの絶対値がしきい値よりも小さい場合(S260にてYES)、同期PWMを選択し(S270)、位相差ΔPの絶対値がしきい値よりも大きい場合(S260にてNO)、非同期PWMを選択する(S280)。
(もっと読む)
電動機の制御装置
【課題】スイッチングノイズの影響を回避することにより、電流検出誤差を抑制して制御性の向上を図る。
【解決手段】PWMキャリア信号の所定位相のタイミングにおいて、電動機の相電流と電動機のロータの回転角とをそれぞれ取得するとともに、相電流指令と相電流との差、および回転角に基づいて電圧指令が演算される。そして、PWMキャリア信号の次回のキャリア周期における所定位相のタイミングにおいて出力される電圧指令とPWMキャリア信号とに基づいて、PWM制御のデューティー指令が演算される。ここで、相電流および回転角の取得タイミングの位相は、インバータのスイッチング動作のタイミングに基づいて可変に設定される。
(もっと読む)
交流電動機の制御装置
【課題】交流電動機に印加される矩形波電圧の電圧位相をトルク指令値に基づいて変化させるフィードフォワード制御について、演算処理の複雑化を招くことなく広いトルク制御範囲にわたって共通に適用できるような制御構成を提供する。
【解決手段】非線形特性を有するトルク特性線500において現在の動作点での接線の傾きに従った線形近似演算によって、トルク指令値に対するトルク補償量を解消するための位相変化量を求める。反転領域600,610では、接線の傾きが他の領域とは異なるため、位相変化量が本来とは反対の極性で算出される虞がある。このため、動作点を更新しつつ線形近似演算を複数回繰返す演算処理において、線形近似演算によって求められた接線の傾きが負であるときには、当該傾きを正の所定値に修正した上で、繰返演算を実行する。
(もっと読む)
コンバータの制御装置
【課題】負荷が変動しても安定した電圧を出力可能なコンバータの制御装置を提供すること。
【解決手段】直流電源の出力電圧を昇圧又は降圧して負荷に印加するコンバータの制御装置は、所定のデューティに基づいてコンバータをPWM制御するPWM制御部と、負荷に流れる負荷電流、直流電源の出力電圧、及びコンバータに含まれるリアクトルのインダクタンス成分に基づいて、デューティを補償するデューティ補償部とを備える。
(もっと読む)
モータの制御装置
【課題】コンバータによってインバータの直流側電圧を可変制御可能に構成されたモータの制御装置において、トルク制御性および効率をバランスさせるように矩形波電圧制御におけるコンバータの動作状態を適切に制御する。
【解決手段】矩形波電圧制御によって要求される電圧位相φvが、昇圧判定位相よりも大きくなるとコンバータに対して昇圧要求が発せされる。モータの必要トルクが大きいときには、昇圧判定位相が低く(φ0)設定されるので、インバータの直流側電圧を早期に昇圧することにより高トルクの確保が容易となることによって、トルク制御性が向上される。一方、モータの必要トルクが小さいときには、昇圧判定位相が高く(φ1)されるので、コンバータをスイッチング損失が低い非昇圧モードで長期間動作させることができる。
(もっと読む)
1 - 20 / 58
[ Back to top ]