
Fターム[5H505LL06]の内容
交流電動機の制御一般 (51,584) | 検出変量、検出手段 (8,979) | 速度の検出 (1,620) | デジタル値で検出するもの (278)
Fターム[5H505LL06]の下位に属するFターム
パルスエンコーダを用いるもの (235)
ホール素子を用いるもの(デジタル) (24)
Fターム[5H505LL06]に分類される特許
1 - 19 / 19
モータ制御装置
【課題】トルク応答性の遅れを抑制するモータ制御装置を提供する。
【解決手段】モータ10の回転速度を検出するモータ回転速度検出手段と、外部から入力されるトルク指令値及び前記回転速度に基づき、所定の上限電流値の範囲内である、第1の励磁電流指令値及びトルク電流指令値をそれぞれ演算する電流指令値演算手段と、前記第1の励磁電流指令値の位相を進めて第2の励磁電流指令値を演算することで、前記モータのロータ磁束の遅れを補償する補償手段と、前記上限電流値及び前記トルク電流指令値に基づいて、前記励磁電流指令値の上限値である上限励磁電流指令値を演算する上限励磁電流指令値演算手段と、前記第2の励磁電流指令値を、前記上限励磁電流指令値以下に制限することで、第3の励磁電流指令値を演算する励磁電流指令値制限手段と、前記第3の励磁電流指令値及び前記トルク電流指令値に基づいて前記モータを制御するモータ制御手段と、を備える。
(もっと読む)
電気機械の作動のための方法および駆動装置
本発明は電気機械の作動のための方法および駆動装置に関している。この電気機械は、ローターとステーターを有しており、駆動装置は駆動ユニット(2)を有している。本発明によれば、ステーターに対するローターの角度位置が、前記駆動ユニット(2)に対応付けされている回転角センサ(4)を確定される。さらに本発明の対象は駆動装置にも関している。  (もっと読む)
(もっと読む)
電気駆動装置の運動変量のフェイルセーフ監視方法および装置

【課題】簡単かつ費用対効果に優れた電気駆動装置(14)のトルクのフェールセーフ監視方法を提供する。
【解決手段】電気駆動装置(14)の第1の駆動電流(Ia)および第2の駆動電流(Ib)をそれぞれ表す第1の測定信号(32a)および第2の測定信号(32b)が測定装置(32)によって測定される。これら第1および第2の測定信号(32a、32b)の関数として、磁界生成直軸電流成分(Id)およびトルク生成横軸電流成分(Iq)が決定され、運動変量の実際値が決定される。測定装置(32)の検査を行う規定の試験パターン(64)を形成する可変試験電流成分(66)を用いて上記駆動電流(Ia、Ib)の少なくとも一方が生成される。この試験電流成分(66)は、上記規定の試験パターン(64)が直軸電流成分(Id)中に現れる一方、当該試験パターンが横軸電流成分(Iq)には実質的に含まれないように選択される。
(もっと読む)
モータ駆動システム
【課題】モータを駆動する際の出力のリプルを抑制する。
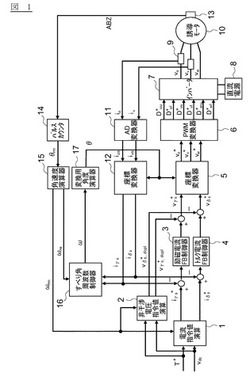
【解決手段】交流電動機200における複数の巻線200u,200v,200wを星形結線した中性点Nとインバータ12の直流入力側との間に直流電源10を接続し、インバータ12の直流入力側に並列に入力コンデンサ14を接続し、交流電動機200の巻線電流及び回転角、直流電圧の出力電圧及び入力コンデンサの端子電圧を入力値として、インバータの各相電圧指令値を生成し、各相電圧指令値に応じたパルス幅を有する駆動パルスを生成してインバータを制御する場合に、交流電動機200のq軸の電圧指令値に交流電動機200の相数倍の高調波成分であり回転角に応じたトルクリプル補償電圧値を加算した値をq軸の電圧指令値とする。
(もっと読む)
誘導機制御装置
【課題】複数台誘導機一括制御において、誘導機間の速度差が大きくなると、誘導機速度に演算誤差が生じ、誘導機実すべりが拡大し、誘導機が脱調状態に陥る。
【解決手段】誘導機に備えた速度検出器の出力を検知速度とし、推定すべりとすべり指令を入力し検知信号を出力するすべり差拡大検知手段と、トルク指令と検知信号から制御トルク指令を作成するトルク指令演算器と、誘導機速度と検知信号と検知速度を入力し制御速度を出力する速度選択器を新たに追加し、トルク指令の代わりに制御トルク指令をトルク制御手段に入力し、誘導機速度の代わりに制御速度をトルク制御手段に入力する。
(もっと読む)
モータの制御装置
【課題】モータを検査するために、特殊な治具等を必要とせず、また、故障初期段階でのモータの異常を検出することができるモータの制御装置を提供する。
【解決手段】電圧誤差検出器18は、励磁電流同相電圧誤差ΔVdcの大きさが予め設定された閾値Ref1を超えた場合と、励磁電流電圧誤差ΔVdcを入力とした1次遅れ回路の出力の大きさが予め設定された閾値Ref2を超えた場合と、トルク電流同相電圧誤差ΔVqcの大きさが予め設定された閾値Ref3を超えた場合と、トルク電流同相電圧誤差ΔVqcを入力とした1次遅れ回路の出力の大きさが予め設定された閾値Ref4を超えた場合との4つの条件のうち少なくとも1つを満たすことにより、モータの状態が異常であることを検出し、その状態W1を上位制御装置1に出力する。
(もっと読む)
モータ駆動装置、集積回路装置およびモータ装置
【課題】簡易な構成で回転速度に応じた進角量を設定でき、進角切替え時における回生現象に起因した過電圧から電源装置などを保護する。
【解決手段】モータ10を駆動するインバータ20と、速度偏差に基づく駆動制御信号VSPを出力する速度制御部40と、複数の進角量を選択可能なように保持し、選択された進角量を示す位相進角信号PS1を出力する進角設定部60と、進角量の選択が切替えられたとき、位相進角信号PS1が示す進角量の時間あたりの変化量の抑制した位相進角信号PS2を出力する変化量抑制部50と、駆動制御信号VSPに応じた波高値、および位相進角信号PS2に応じた位相の波形信号WFを生成する波形生成部31と、波形信号WFに応じた駆動信号によりインバータ20を駆動することで、モータ10の速度を制御するインバータ駆動部30とを備える。
(もっと読む)
電動パワーステアリング装置
【課題】別途舵角センサ等を追加することなく、電動パワーステアリング装置が操舵限界位置到達時のトルク伝達部材に伝達されるピークトルクを抑制する。
【解決手段】ステアリング機構に操舵補助トルクを伝達する電動モータ12と、操舵トルクに基づく電流指令値に応じて前記電動モータ12をパルス幅変調信号によって駆動制御するモータ制御部25と、前記電動モータ12のモータトルクを検出するモータトルク検出部26aと、検出したモータトルクの変化率を演算するモータトルク変化率検出部26bと、演算したモータトルク変化率が操舵限界を判断する閾値以上であるときに電流指令値制限条件を満足したものと判断して前記電流指令値を前記ステアリング機構の前記ステアリングシャフト及び転舵輪間のトルク伝達部材に伝達されるトルクを抑制するように制限する電流指令値制限部23とを有する。
(もっと読む)
モータ制御装置、モータ制御方法及び車両用駆動制御装置
【課題】界磁コイルの温度上昇に起因するモータの加熱をより適切に防止すること。
【解決手段】モータ4の界磁コイル10の抵抗値を検出し、その検出結果に基づいて界磁コイル10の温度を推定するようにした。そのため、界磁コイル10の温度を精度よく検出でき、例えば、ステータコイル12の温度に基づいてモータ4の出力制限を行う方法に比べ、界磁コイル10の温度上昇に起因するモータ4の加熱をより適切に防止できる。
(もっと読む)
二重給電同期機の制御システム
【課題】電力系統の事故除去後の電力系統の電圧不安定や、遠方負荷遮断時の二重給電同期機の異常電圧上昇を有効に防止できる二重給電同期機の制御システムを提供する。
【解決手段】二重給電同期機2の無効電力を予め設定された無効電力目標値に制御する無効電力制御手段7,9,11,12〜13と、二重給電同期機2の固定子電圧を予め設定された電圧目標値に制御する固定子電圧制御手段7,9,11,32〜34と、電力系統の事故の発生を検出する事故手段43,52と、事故手段43,52による電力系統の事故検出に応じて無効電力制御手段7,9,11,12〜13による無効電力制御から固定子電圧制御手段7,9,11,32〜34による電圧制御に切り替える切替手段62とを備え、この切り替えにより電力系統の異常な電圧変動を抑制できるようにした。
(もっと読む)
電力変換装置
【課題】コンバータの電流制御能力を超えるような直流電圧低下を未然に抑制することが可能な電力変換装置を提供する。
【解決手段】交流入力を受け、その出力の直流電圧を所望の値に制御するようにしたコンバータ20と、この直流電圧を入力とし、その交流出力でモータ4を駆動するインバータ30とを備えた構成において、コンバータ20の出力電流が所定値を超えたとき、インバータ30の電流指令のリミッタを制限する手段を設ける。
(もっと読む)
電動駆動制御装置及び電動駆動制御方法
【課題】制御系の特性が変化するのを防止することができ、電動機械を安定させて駆動することができるようにする。
【解決手段】電動機械目標トルクに基づいて電流指令値を算出する電流指令値算出処理手段と、電流指令値と電動機械に供給される電流との電流偏差を算出する偏差算出処理手段と、電流が変化したときの変化量が互いに異なる第1、第2のインダクタンスを算出するパラメータ算出処理手段と、干渉項の演算を行う干渉項演算処理手段と、比例項及び積分項の演算を行う比例積分項演算処理手段と、電圧指令値を算出する電圧指令値調整処理手段とを有する。広範囲の運転領域に対して制御系の特性を一定にすることができる。
(もっと読む)
電動機制御装置
【課題】 瞬時停電時にインバータのDC母線電圧検出をすることなしにDC母線電圧を維持し運転を継続することができるインバータを提供する。
【解決手段】コンバータ部(2)と逆変換部(4)と、速度指令部(7)と力行運転時の電動側トルクリミット部(11)と、回生運転時の回生側トルクリミット部(9)とトルクリミット回路(15)と、トルク指令に応じて電流制御する電流制御回路(16)と電圧指令演算回路(17)とゲート信号生成回路(18)と、速度検出回路(19)と、停電検出回路(6)とを備え、交流電源の停電を検出すると電動機の減速を開始させ、運転継続する電動機制御装置において、停電時に速度指令零を出力する停電時速度指令部(8)と、停電時回生側トルクリミット演算回路(20)と、停電検出すると速度指令部(7)を停電時速度指令部(8)へ切替えると同時に回生トルクリミット部(9)を停電時回生側トルクリミット演算回路(20)へ切替える切替えスイッチ(12a、12b)とを備えた。
(もっと読む)
モータ制御装置およびこれを用いた電気機器
【課題】 直流電圧が変動しても、常に所望の回転数で高効率の弱め界磁制御を実現する。
【解決手段】 基準直流電圧における回転数に対して設定されたd軸電流指令を記憶したd軸電流テーブル17を備える。参照回転数補正部14は、基準直流電圧と検出された直流電圧との差に応じて、検出された回転数を補正する。d軸電流演算部15は、d軸電流テーブル17を参照して、補正後の回転数に対するd軸電流指令を決定する。この電流指令に基づいてモータ1の弱め界磁制御を行う。
(もっと読む)
モータ駆動システムの制御装置
【課題】 トルクフィードバック制御による矩形波制御方式と、モータ電流フィードバック制御によるPWM制御方式とをモータ運転条件に応じて切換えて用いるモータ駆動システムにおいて、PWM制御方式時における磁石温度に起因したトルク変動を抑制する。
【解決手段】 モータ電流制御によって交流モータM1のトルク制御を行なうPWM制御ブロック200は、トルク推定部310によるトルク推定値Trqと本来のトルク指令値Tqcomとの偏差に従ってトルク指令値を修正するトルク指令修正部320を備える。電流指令値生成部210により、モータ電流制御のための電流指令値Idcom,Iqcomは、トルク指令修正部320によって修正されたトルク指令値Trqcom♯に基づき生成される。これにより、磁石温度に依存したモータ出力特性の変化を補償するように、トルク偏差を反映したモータ電流制御を行なうことができる。
(もっと読む)
電動機のパラメータ調整方法とその方法を利用した変速機
【課題】誘導電動機Mの制御用変速機の電動機パラメータ調整方法を提供する。
【解決手段】本発明は、電動機の磁束、トルク電流のリファレンスと測定値の差ΔID及びΔIQを算出する工程、差異ΔID及びΔIQの積分項から回転子抵抗の修正値ΔRR及び回転子インダクタンスの修正値ΔLRを計算する工程、ΔLR及びΔRRに基づく電動機のモデルのパラメータ値調整工程、上記電動機のパラメータ調整値を用いて電動機Mに加える制御電圧UD及びUQを発生する工程を有する。
(もっと読む)
交流電動機の制御装置
【課題】直流中間電圧調節手段の出力をトルク指令値とし、交流電源の停電時に上記トルク指令値を用いて直流中間電圧を制御することで、従来よりも応答性を向上させた交流電動機の制御装置を提供する。
【解決手段】インバータを用いてベクトル制御を行う交流電動機の制御装置であって、交流電源の停電時に、電動機または負荷の慣性エネルギーをインバータへ回収してインバータの直流中間電圧の低下を抑制する交流電動機の制御装置に関する。直流中間電圧が所定の運転継続レベルにまで低下した時に交流電源の停電を検出して判別信号を出力する直流電圧判別手段11と、前記判別信号により起動され、直流中間電圧を運転継続レベルに維持するためのトルク指令値を演算して出力する直流中間電圧調節器14と、非停電時における電動機3のトルク指令値を、前記判別信号により直流中間電圧調節器14からのトルク指令値に切り換える切換スイッチ15とを備える。
(もっと読む)
誘導電動機のベクトル制御装置
【課題】特別な装置を付加することなく、ソフトウェア上の処理の追加にて相互インダクタンスの設定値を実際値にあわせるよう補正することができる誘導電動機のベクトル制御装置を提供することを目的とする。
【解決手段】この発明に係る誘導電動機のベクトル制御装置1は、誘導電動機15の一次電流の実測値を用いて計算したトルク演算値とトルク指令発生部で生成された誘導電動機15に対するトルク指令値との誤差に基づいて、誘導電動機15の相互インダクタンスの補正値を求める相互インダクタンス補正部3と、相互インダクタンスの補正値を含む誘導電動機15の回路定数を用いて、誘導電動機15の発生トルクがトルク指令値と一致するように誘導電動機を制御するベクトル制御部2とを備えたものである。
(もっと読む)
モータ制御装置、及び洗濯機
【目的】 モータの回転数を、電流位相、電源周波数に係わらず安定して制御する。また、モータからの耳障りの音を低減させたり、モータ駆動部の故障検出を行う。
【構成】 商用電源1に接続されたトライアック12と単相誘導モータ2と、単相誘電モータ2に接続された回転速度検出器4と、回転速度検出器4からの信号と電源ゼロクロ信号とを入力し、ストライアック12の点弧タイミングを決定して駆動信号を出力する制御回路5とを備えたものである。
(もっと読む)
1 - 19 / 19
[ Back to top ]