
Fターム[5H505LL07]の内容
交流電動機の制御一般 (51,584) | 検出変量、検出手段 (8,979) | 速度の検出 (1,620) | デジタル値で検出するもの (278) | パルスエンコーダを用いるもの (235)
Fターム[5H505LL07]の下位に属するFターム
Fターム[5H505LL07]に分類される特許
1 - 20 / 181
液体抵抗器の劣化診断装置
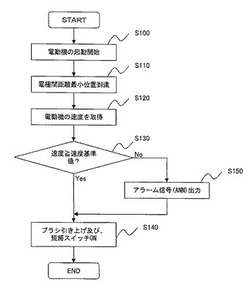
【課題】この発明は、液体抵抗器の劣化診断装置に関し、液体抵抗器の劣化を、機器を分解することなく判断することのできる液体抵抗器の劣化診断装置を提供することを目的とする。
【解決手段】巻線形誘導電動機の速度を検出する速度センサと、前記巻線形誘導電動機の二次回路に接続され前記巻線形誘導電動機の起動に際し電極間距離を徐々に縮めることによりその抵抗値を下げる液体抵抗器と、前記電極間距離が最小となったときに前記速度センサにより検出される電動機速度が速度基準値を下回るか否かを判定する電動機速度判定手段と、前記電動機速度が前記速度基準値を下回る場合にアラーム信号を出力するアラーム信号出力手段とを備える。
(もっと読む)
電動機の駆動方法および駆動装置

【課題】電動機の損失を最小化することができる電動機の駆動方法および駆動装置を提供する。
【解決手段】第1時刻から所定時間経過した第2時刻において目標回転速度ω*となるように電動機を駆動させる電動機の駆動方法であって、目標回転速度ω*を設定する目標設定ステップ(S1)と、電動機の入出力特性から得られたマップにおいて、第1時刻の動作点と、第2時刻の動作点と、第1時刻と第2時刻の間の時刻における複数の動作点とで構成された初期軌道L1を決定する初期軌道決定ステップ(S2、S3)と、初期軌道L1を構成する全動作点における損失の和が最小(または効率の和が最大)となるように、マップに基づいて最適化を行って目標軌道L2を導出する目標軌道導出ステップ(S4〜S7)と、目標軌道L2に従ってトルクおよび回転速度を制御する制御ステップと、を含むことを特徴とする。
(もっと読む)
電気機械のロータ角度を推定する方法およびシステム
【課題】電気機械のロータ角度またはロータ位置を精度高く推定する。
【解決手段】永久磁石電気機械117に結合されたエンコーダ115から、位置サンプルが格納される。データ・プロセッサが、連続する位置サンプル間における第1位置変化と、連続する第1位置変化における第2変化とを判定する。データ・プロセッサは、各第1位置変化が全体的に増大しているか、減少しているか、または一定であるか判定を行う。第1位置変化が全体的に増大しているかまたは減少しているかに基づいて、格納された各位置サンプルに補正位置係数が適用される。データ・プロセッサは、位置サンプルの内特定の1つと、それぞれの時点に対応する位置サンプルの特定の1つと関連した、対応する第1位置変化とに基づいて、電気機械の最終ロータ角度を推定する。
(もっと読む)
電力変換装置
【課題】還流ダイオードに流れる電流の振動によって発生するノイズを抑制する電力変換装置を提供する。
【解決手段】複数のスイッチング素子Q1〜Q6と還流ダイオードD1〜D6とを有し、前記複数のスイッチング素子Q1〜Q6のオン及びオフを切り換えることで、入力された電力を変換し、負荷に出力する電力変換回路と、前記複数のスイッチング素子Q1〜Q6を駆動する駆動回路20と、前記電力変換回路及び前記駆動回路20を制御する制御手段とを備え、前記制御手段は、前記電力変換回路から前記負荷に供給される供給電流が0アンペア付近にある場合に、前記スイッチング素子Q1〜Q6をターンオンさせる際のスイッチング速度を、前記供給電流が0アンペア付近ではない場合のスイッチング速度より低下させる。
(もっと読む)
排熱回収装置
【課題】タービンで発電した電力でコンプレッサを駆動して排熱回収することができ、コンプレッサの制御が容易であり、かつ排熱を回収するために複数のタービンを必要とする場合への適用が容易である排熱回収装置を提供する。
【解決手段】直流バス5の直流電圧を検出する電圧検出器12と、直流電圧に基づいて算出されたコンプレッサ8A,8Bの回転速度指令値16A,16Bをインバータ6A,6Bに出力する回転速度指令器13とを備える。
(もっと読む)
同期機制御装置
【課題】同期機や電力変換手段等の状態に応じて、適切な運転目標指令を生成し、運転目標を満足する制御指令を生成する。
【解決手段】トルク指令と回転速度と運転目標指令とに基づいて、電機子鎖交磁束指令とトルク電流指令を生成する制御指令生成器10を、トルク指令またはトルク電流指令に基づき第1の磁束指令を生成する第1の磁束指令生成器21と、トルク指令またはトルク電流指令と同期機1の回転速度とに基づき第2の磁束指令を生成する第2の磁束指令生成器22と、運転目標指令に基づき第1および第2の磁束指令の2つの磁束指令の配分比に相当する配分係数を設定する指令配分設定器23と、2つの磁束指令と配分係数に基づき電機子鎖交磁束指令を出力する磁束指令調整器24と、トルク指令と電機子鎖交磁束指令とに基づきトルク電流指令を生成するトルク電流指令生成器25により構成する。
(もっと読む)
電動機の制御装置、制御システム及び制御方法
【課題】電動機のトルクを、安定して高い精度で制御できる、電動機の制御装置、制御システム及び制御方法を提供する。
【解決手段】永久磁石同期電動機の回転軸に、半導体歪みセンサの出力を無線送信する無線送信装置を取り付ける一方、電動機本体に無線送信装置からの送信を受信する無線受信装置を設ける。電動機を駆動制御する制御装置は、無線送受信装置を介して歪みセンサの出力を入力し、電動機のトルクを検出し、トルク検出値とトルク指令値との偏差に基づき、電動機のPWM制御信号を演算して出力する。これにより、電動機における電流とトルクとの相関が、永久磁石の温度変化や劣化によって変動しても、電動機のトルクを高精度に制御できる。
(もっと読む)
鞍乗型車両
【課題】インバータの大型化を抑えつつインバータの故障を防止できかつモータの巻線を円滑に切り替えることができる、乗り心地の良い鞍乗型車両を提供する。
【解決手段】自動二輪車10は、切り替え可能な巻線を有するモータ18と、アクセルグリップ22と、アクセルグリップ22からの指示に基づいて制御信号を出力する制御部20と、制御部20からの制御信号に基づいてモータ18に出力電圧を供給するインバータ14と、巻線を切り替えるスイッチ16a〜16cと、モータ電流を検出する電流センサ24a,24bと、モータ18の位相を検出するエンコーダ26とを備える。制御部20は、巻線の切り替え条件が成立したとき、アクセルグリップ22からの指示に係わらずモータ電流が0になるように、モータ電流とモータ18の位相とに基づいてインバータ14のデューティー比を調整する。デューティー比調整期間中に巻線を切り替える。
(もっと読む)
交流電動機の制御装置
【課題】過渡電圧飽和に起因して生じ得る電動機の不安定現象を抑制すること。
【解決手段】交流電動機の制御装置は、速度指令を生成する位置制御器と、電流指令を生成する速度制御器と、電圧指令を生成する電流制御器と、q軸電圧方程式の過渡電圧成分に相当するq軸電圧飽和量ΔVqを算出するdi/dtリミッタ部と、q軸電圧飽和量ΔVqを用いて位置指令修正量ΔPを生成する飽和量F/B部105と、を備える。また、この飽和量F/B部105は、q軸電圧飽和量ΔVqを通過させ、その出力の換算値を位置指令修正量ΔPとして位置制御器の入力側にフィードバックするLPF121と、電動機の電気回路時定数の逆数相当値をLPF121の帯域を決定するフィルタ定数ωとしてLPF121に設定する帯域設定器122と、を備える。
(もっと読む)
駆動信号生成回路
【課題】処理負荷を抑制しつつモータの回転を安定化させることができる駆動信号生成回路を提供する
【解決手段】駆動信号生成回路は、電流検出部と、d軸電流及びq軸電流を算出する算出部と、三相モータの回転速度を示す速度信号と、三相モータの目標回転速度を示す目標信号とに基づいて、q軸電流の第1基準値を示す基準信号出力部と、d軸電流の電流値及び第2基準値の誤差に応じた第1制御信号出力部と、q軸電流の電流値及び第1基準値の誤差に応じた第2制御信号出力部と、三相モータを駆動する駆動回路に対し、第1及び第2制御信号に基づいて、d軸電流が第2基準値となり、q軸電流の電流値が第1基準値となるような駆動信号を出力する駆動信号出力部と、三相モータの回転速度が所定の回転速度となった後に、第2制御信号に基づいて、第2制御信号のリップルが小さくなるよう検出出力を調整する調整部と、を備える。
(もっと読む)
永久磁石同期モータの制御装置
【課題】モータを駆動しつつモータ定数を迅速に同定し、電流検出手段のオフセット値を同定して除去可能とする。
【解決手段】モータの速度及びd,q軸電圧を入力としてd,q軸推定電流を演算する電流シミュレータ9と、d軸検出電流が零となるようにモータを定速制御し、d,q軸推定電流及びd,q軸検出電流から磁束鎖交数の偏差が零となるようにシミュレータ9の自己インダクタンスノミナル値を調整して自己インダクタンスを同定し、d軸検出電流が所定値となるようにモータを制御し、d,q軸推定電流及びd,q軸検出電流から磁束鎖交数の偏差が零となるようにシミュレータ9の電機子抵抗ノミナル値を調整して電機子抵抗を同定し、d,q軸推定電流及びd,q軸検出電流から磁束鎖交数を同定し、d軸推定電流と検出電流との偏差、及び、q軸推定電流と検出電流との偏差から、電流検出手段のオフセット値を同定する同定手段10と、を備える。
(もっと読む)
永久磁石同期電動機の駆動制御方法
【課題】 本発明は、数学モデルに立脚した永久磁石同期電動機の駆動制御方法に関する。特に、永久磁石磁束がq軸電流により軸間磁束干渉を受ける永久磁石同期電動機に対して、軸間磁束干渉の影響を排除して電動機を適切に駆動できる制御方法を提供する。
【解決手段】 固定子電流の制御を担う電流制御器6には、軸間磁束干渉を考慮に入れた非干渉器を備えさせ、高精度な電流制御を可能とした。また、マグネットトルク指令値からq軸電流指令値の生成を担う補正形指令生成器10には、軸間磁束干渉を考慮に入れた非線形な変換を遂行させ、高精度な電流制御と共に、トルク指令値通りのマグネットトルクを発生できるようにし、課題を解決した。
(もっと読む)
射出成形機
【課題】モータの回生電力を効率的に回生できる、射出成形機を提供すること。
【解決手段】モータと、前記モータを駆動する駆動回路と、前記駆動回路に電力を供給する整流器102とを備える射出成形機であって、前記モータの回生電力の回生経路82が整流器102に並列接続され、前記駆動回路と整流器102との間の直流電力を交流電力に変換するブリッジ回路104と、ブリッジ回路104によって変換された交流電力が入力される高調波成分抑制部63とを回生経路82に備えるとともに、ブリッジ回路104によって変換された交流電力の電流波形が正弦波になるようにブリッジ回路104の動作を制御するコントローラ26を備えることを特徴とする、射出成形機。
(もっと読む)
織機における運転制御装置及び運転制御方法
【課題】起動時の筬打ち不足を解消し、かつ織機の目標回転速度の下限を下げる。
【解決手段】デルタ用電磁接触器25及びスター用電磁接触器26は、織機制御コンピュータCoのON−OFF制御を受ける。織機駆動モータMは、インバータ28を介して商用電源27に電気的に接続されている。インバータ28は、織機制御コンピュータCoの指令制御を受け、織機制御コンピュータCoは、インバータ28の出力電圧や出力周波数を指令制御する。織機制御コンピュータCoは、起動時にインバータ28とデルタ結線回路とを用いて織機駆動モータMを起動する起動運転制御機能と、定常運転時にインバータ28とスター結線回路とを用いて織機駆動モータMを駆動する定常運転制御機能とを有する。
(もっと読む)
射出成形機
【課題】循環電流を抑えつつ、整流時に発生する高調波を抑制できる、射出成形機を提供すること。
【解決手段】モータと、前記モータを駆動する駆動回路と、前記駆動回路に電力を供給する整流器102と、前記駆動回路と整流器102との間の直流電力を交流電力に変換して出力するブリッジ回路104とを備える射出成形機であって、交流電源電圧が一次側に入力される変圧器67と、ブリッジ回路104によって変換された交流電力の電流波形が正弦波になるようにブリッジ回路104の動作を制御するコントローラ26とを有し、変圧器67の第一の二次巻線の接続先が整流器102の入力側であり、変圧器67の第二の二次巻線の接続先がブリッジ回路104の出力側であることを特徴とする、射出成形機。
(もっと読む)
電動機の可動子の温度を検出する温度検出装置
【課題】電動機の可動子を過熱保護するために電動機の可動子の温度を検出することができる温度検出装置を提供する。
【解決手段】永久磁石同期電動機5の可動子52の温度を検出する温度検出装置10は、永久磁石同期電動機5の固定子53に設けられた巻線55u,55v,55wのU相交流電流値Iu、V相交流電流値Iv及びW相交流電流値Iwを検出する電流検出部11と、U相交流電流値Iu、V相交流電流値Iv及びW相交流電流値Iwを用いて可動子52の鉄損pを推定する鉄損推定部12と、鉄損pを用いて可動子52の温度を推定する可動子温度推定部13と、を有する。
(もっと読む)
制御装置
【課題】トルク指令に周期的なトルク振動が含まれる場合であっても、電流指令に対する追従性能を向上させるとともに、矩形波制御の実行が開始される場合に、矩形波の出力電圧波形の位相が急変することを防止できる交流回転電機の制御装置が求められる。
【解決手段】電流フィードバック制御部は、トルク振動の周波数の周期関数の特性を有する高調波モデルを用いた演算の出力値に少なくとも基づいて二相電圧指令を算出し、矩形波制御の実行が開始された場合は、トルク振動の周期に応じて設定された期間内でゼロとなるように、高調波モデルを用いた演算の出力値を徐々に変化させる減衰処理を実行する制御装置。
(もっと読む)
制御装置
【課題】トルク指令に周期的なトルク振動が含まれる場合であっても、電流指令に対する追従性能を向上させるとともに、矩形波制御が実行される場合に、制御系が不安定になることを抑制できる交流回転電機の制御装置が求められる。
【解決手段】電圧制御部は、第一変調率域ではパルス幅変調制御を実行し、第二変調率域では矩形波制御を実行し、電流フィードバック制御部は、トルク指令に周期的なトルク振動が含まれる場合に、振動周波数の周期関数の特性を有する高調波モデルにより二相電圧指令を算出し、トルク電流演算部は、第一変調率域において変調率が増加するに従ってトルク振動の振幅を減少させ、第二変調率域でトルク振動の振幅をゼロとするように、トルク指令に含まれる前記トルク振動の制限を実行する制御装置。
(もっと読む)
誘導電動機の速度制御装置
【課題】本発明は、連続工程ラインにおいて張力及び位置センサーを用いないオープン−ループ速度制御を行って、ベクトルインバータの機能を向上するための誘導電動機の速度制御装置を提供する。
【解決手段】本発明の装置は、張力指令、摩擦損補償を利用して、速度制御部の出力に対するトルク制限を計算し、これを利用して誘導電動機の速度を制限して、連続工程ラインで張力センサー及び位置センサーを用いることなく、ベクトル制御方式のインバータの性能を向上することができる。
(もっと読む)
インバータ制御装置及びインバータ制御方法
【課題】安定な制御系である、インバータ制御装置及び制御方法を提供する。
【解決手段】 直流電源から入力される直流電力を交流電力に変換し、モータに供給するインバータ6と、インバータ6から出力される交流電圧の指令値を、交流電流の検出値に基づき算出する指令値算出手段と、指令値の位相又は検出値の位相を補償する位相補償手段と、位相補償手段により補償された指令値又は検出値に基づき、インバータ6を制御するインバータ制御手段と、モータ8の回転速度を検出するモータ回転速度検出手段とを備え、位相補償手段は、所定の位相余裕を得るために設定された位相補償時間及び回転速度に基づき位相進み量を算出し、位相進み量に応じて、モータ8の固有の特性に基づく位相を補償する。
(もっと読む)
1 - 20 / 181
[ Back to top ]