
Fターム[5H530BB33]の内容
Fターム[5H530BB33]に分類される特許
1 - 20 / 25
制御方法及び制御装置
【課題】装置の大型化やコストアップを抑制しつつ、回生抵抗によって消費される回生電力を低減すること。
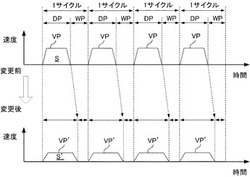
【解決手段】モータからの回生電力の少なくとも一部を熱エネルギとして消費する回生抵抗を備えた回生回路に接続されたモータの制御方法において、前記モータを所定の速度制御パターンで駆動する駆動工程と、該駆動工程後に前記モータを停止する待機工程と、を反復する反復工程と、前記駆動工程中、前記回生抵抗への通電状況を、監視回路にて監視する監視工程と、前記監視工程の監視結果に応じて、前記回生電力の発生が低減するように前記速度制御パターンを変更し、かつ、前記速度制御パターンの変更に伴い、前記駆動工程の実行時間を長くすると共に、前記待機工程における待機時間を短くする変更工程と、を備えたことを特徴とする。
(もっと読む)
産業用ロボットの可動部の回転軸に接続されたサーボモータを駆動するサーボモータ駆動装置

【課題】電源回生機能を産業用ロボットの操作条件に応じて追加することができるサーボモータ駆動装置を提供する。
【解決手段】サーボモータ駆動装置2は、ダイオード209a−1,209a−2,209a−3,209a−4,209a−5,209a−6を有するコンバータ201aと、産業用ロボット3の可動部の回転軸に接続されたサーボモータ300−1,300−2,...,300−mの減速駆動時に生じる回生エネルギーを、NPN型トランジスタ210aがオン状態であるときに消費する回生抵抗211aを有する回生抵抗回路202aと、回生エネルギーを三相交流電源1側に回生するコンバータ4を着脱自在に接続するコネクタ203a,204a及び多ピンコネクタ205aと、を有する。
(もっと読む)
ロボットシステム
【課題】モータの駆動を制御する駆動制御手段の制御内容を変更することなく、高トルク運転時にモータに対して十分な電力を供給可能とするか、または減速動作時にモータから生じる回生エネルギーを有効利用可能とする。
【解決手段】昇降圧回路29は、入力電圧を昇圧して出力する昇圧動作、入力電圧を降圧して出力する降圧動作および入力電圧をそのまま出力する非昇降圧動作のいずれかの動作を実行する。電源制御部26は、エコモードに設定されると、モータMの動作状態にかかわらず、降圧動作を実行するように昇降圧回路29の動作を制御する。電源制御部26は、トルク重視モードに設定されると、バス電圧の検出値に基づいてモータMが加速動作されていると考えられる期間に昇圧動作を実行するとともに、その期間を除く期間には非昇降圧動作を実行するように昇降圧回路29の動作を制御する。
(もっと読む)
ロボットシステム
【課題】モータの駆動を制御する駆動制御手段の制御内容を変更することなく、高トルク運転時にモータに対して十分な電力を供給することができるとともに、減速動作時にモータから生じる回生エネルギーを有効利用することを可能とする。
【解決手段】昇降圧回路29は、入力電圧を昇圧して出力する昇圧動作、入力電圧を降圧して出力する降圧動作、入力電圧の供給が遮断する電源遮断動作などを実行する。電源制御部26は、バス電圧の検出値に基づいて、モータMが加速動作状態であると判断される期間には昇圧動作を実行し、減速動作状態であると判断される期間には電源遮断動作を実行し、それらの期間を除く期間には降圧動作を実行するように昇降圧回路29の動作を制御する。
(もっと読む)
モータの制御システム
【課題】モータの回生電力を好適に回収し、しかもその回生電力の有効利用を図る。
【解決手段】モータ電源回路13において、電力経路24,25にはコンデンサ26,27とスイッチ31,32とが各々設けられている。電力経路24,25と制御電源回路15の電力経路43とを接続する電力経路46,48にはスイッチ47,49が設けられている。制御回路14は、モータ回生期間において、スイッチ31,32の一方を閉鎖、他方を開放するとともに、スイッチ31,32の開閉の状態に応じて、スイッチ47,49の開閉を制御する。このとき、制御回路14は、各スイッチ31,32,47,49の開閉状態の切替を実施する。
(もっと読む)
蓄電器を用いたモータ駆動装置
【課題】ピーク電力軽減のために蓄電器が使用されるモータ駆動装置において電源から供給される電力の総量を低減する。
【解決手段】モータ駆動装置1は、PWM制御により電源14の交流と直流との間の電力変換を行うPWMコンバータ2と、PWMコンバータ2が出力する直流と周波数可変の交流との間の電力変換を行って周波数可変の交流によりモータを駆動するPWMインバータ3と、PWMコンバータ2とPWMインバータ3との間に設けられモータ8の駆動し得る量の電力を蓄積し得る蓄電器4と、PWMコンバータ2におけるPWM制御をオン又はオフする制御回路5と、を具備し、制御回路5がPWM制御をオンする間はPWMコンバータ2により蓄電器4の電圧は電源より高く制御され、制御回路5がPWM制御をオフすることで電源より高い電圧に充電されていた蓄電器4からモータ8へ電力供給を行いモータ8の減速制御期間中の回生電力を蓄電器4へ回収する。
(もっと読む)
ロボット制御装置およびロボット制御方法
【課題】角度センサに異常が生じた場合において、サーボモータと減速機との接続部分への負担を抑制しつつ、ダイナミックブレーキと機械ブレーキとを用いて速やかにサーボモータを停止させる。
【解決手段】ロボット制御装置200は、角度センサ160の異常が検出された場合において、推定された回転速度においてダイナミックブレーキを作動させたと仮定した場合に該ダイナミックブレーキによって生じる制動トルクと、機械ブレーキ150を作動させたと仮定した場合に該機械ブレーキ150によって生じる制動トルクとのトルク合計値が、所定のトルク上限値を超える場合に、機械ブレーキを作動させずにダイナミックブレーキを作動させる第1の制動処理を実行し、トルク合計値が前記トルク上限値以下の場合には、ダイナミックブレーキおよび機械ブレーキを作動させる第2の制動処理を実行する。
(もっと読む)
生産機器の制御装置及び生産機器用モータの停止制御方法
【課題】位置検出器に故障が発生した場合でも、簡単な構成で迅速にモータを停止させることができる生産機器の制御装置を提供する。
【解決手段】制御装置は、位置検出器の異常を判定すると(S1:YES)、先ず、ダイナミックブレーキを作用させ(S5)、その制動期間中に検出されるサーボモータの各相電流の値から、具体的には各相電流Iu,Iv,Iwの比からサーボモータの現在の電気角θEを推定する(S6〜S9)。そして、ダイナミックブレーキを解除すると、推定した電気角θEに応じて逆トルク制動を行う(S12)。
(もっと読む)
電源回生機能を有するモータ駆動装置
【課題】逆変換器からの電力供給が持続しているときには整流器の回生動作を確実に継続し、逆変換器からの電力供給が終了したときには整流器の回生動作を確実に停止することができるモータ駆動装置を提供する。
【解決手段】整流器と逆変換器とを備え電源回生を行うモータ駆動装置が、三相交流入力電源の入力電圧及び入力電流を検出する検出部と、検出される入力電圧及び入力電流に基づいて、整流器から逆変換器に供給される瞬時有効電力を演算する瞬時有効電力演算部と、その瞬時有効電力演算部によって演算される電力値に基づいて、整流器から逆変換器に供給される有効電力の直流成分を演算する直流成分演算部と、演算される直流成分の値と所定の閾値とを比較し、直流成分の値が閾値よりも大であれば、逆変換器から供給される回生電力を三相交流入力電源に戻す電源回生動作を停止する判定を行なう回生動作停止判定部と、を備える。
(もっと読む)
ロボット制御装置および制御方法
【課題】角度センサから正常に回転角度が取得できなくなった場合に、迅速にサーボモータを停止させることが可能な技術を提供する。
【解決手段】ロボット制御装置200は、角度センサ160から取得した回転角度に応じてサーボモータの駆動をフィードバック制御する第1の駆動制御部と、サーボモータの電気的変量に基づいてサーボモータの回転角度および回転速度を推定する推定部と、推定された回転角度に応じて、サーボモータの駆動をセンサレス制御する第2の駆動制御部と、サーボモータに対して発電制動を行う発電制動部とを備える。ロボット制御装置200は、角度センサ160の異常を検出すると、推定回転速度が所定の閾値以上の場合には、第2の駆動制御部によってサーボモータを減速させ、推定回転速度が所定の閾値未満の場合には、発電制動部によってサーボモータに発電制動を行う。
(もっと読む)
モータ制御装置
【課題】 位置指令と検出位置との位置偏差に位置ループゲインを乗じて速度指令を算出する位置制御と、速度指令と検出速度に基づいてトルク指令を算出する速度制御と、を行なってサーボモータを制御するモータ制御装置において、駆動系の許容加速度が低い機械の場合又は制御対象にワーク等が保持されている場合において、駆動系のダメージ、又は急減速によるワークのずれ等の可能性を低減する。
【解決手段】 位置制御時の加減速時間と最大送り速度を保持する加減速データ保持部16と、該加減速時間と該最大送り速度に応じて、加速度を演算する加速度演算部17と、該加速度と該検出速度に応じて、速度指令を演算する速度指令演算部18と、を設ける。非常停止スイッチが押されたり、アラームが発生したりした時には、速度指令切替部19が位置偏差演算器3からの速度指令Vcから速度指令演算部18からの速度指令Vc’へ速度指令を切り替える。
(もっと読む)
安全停止回路を備えたモータ制御装置
【課題】 安全停止回路を備えたモータ制御装置において、モータ制御装置を駆動する前に、安全停止回路自体の異常状態をモータ制御装置外部の上位装置がより早く確実に検出することができ、安全性を高めることができる安全停止回路を備えたモータ制御装置を提供する。
【解決手段】 安全停止回路150が、外部のモータ停止スイッチ7,8と、前記モータ停止スイッチ7,8と連動して前記PWM信号を遮断する複数の3ステートバッファ5,6と、前記上位装置が前記安全装置自体の異常を判断できるように構成した監視回路151,152と、を備えた。
(もっと読む)
電動モータ並びに電動モータの電源遮断制御回路及び電源遮断制御方法
【課題】簡単な構成で電源供給遮断時に制動をすることができる電動モータを提供する。
【解決手段】電動モータ10であって、磁石125と、電磁コイル120と、前記電磁コイルの両端に接続された整流回路140と、前記電磁コイルと前記整流回路とともに閉回路を形成するとともに、前記モータに対して電源の供給がされている時には導通せず、電源の供給が遮断された時に導通するスイッチ回路150とを備える。
(もっと読む)
電源回生機能を有するサーボアンプ
【課題】過剰なスペックの装置構成を避けることが可能となり、装置のサイズの最適化(小型化)、コスト削減、省エネルギー化を達成できる電源回生機能を有するサーボアンプを提供すること。
【解決手段】交直変換部分(コンバータ部分)11と直交変換部分(インバータ部分)12とが一体化して構成され、交直変換部分(コンバータ部分)11と直交変換部分(インバータ部分)12とはDCリンク16接続により一体的に構成されている。DCリンク16は例えばショートバーやネジ締めによって構成する。また、パワー半導体15はヒートシンク17表面に配置されている。そして、この交直変換部分(コンバータ部分)11と直交変換部分(インバータ部分)12の一体的構成は、パワー半導体15を挟むようにヒートシンク17上に配置される。交直変換部分(コンバータ部分)11は最適なスペックのものを選択して取り付けることができる。
(もっと読む)
多軸ロボット用電源回路およびその電源回路の遮断方法
【課題】簡潔な配線で安価で信号伝達の遅れを考慮する必要がなく、信号線の断線ですべてのモータ電源をオフにする多軸ロボット用電源回路を提供する。
【解決手段】 モータ電源遮断回路を駆動する安全ユニット10において、第1入力回路11に入力信号があるとき正常とする出力信号をCPU12と論理回路13に入力し、CPU12は入力信号が入ると出力信号を論理回路13とモータ電源遮断回路19に入力し、論理回路13は2入力で1出力を第1出力回路14に入力し、第2入力回路16に入力信号があるとき正常とする出力信号をCPU12と第2出力回路17に入力し、第1入力回路11または第2入力回路16に入力が断たれると出力を出さなくなることにより、CPU12がモータ電源遮断回路19を遮断動作させる。
(もっと読む)
安全システムおよび安全機器
【課題】スターデルタ始動される三相モータへの電源を遮断する主マグネットコンタクタが二重化のために二つ必要であったものを、一つのみで構成できるようにする。
【解決手段】停止検知ユニット3の二つの逆起電力検出部が、三相モータ2のU相およびW相の巻線の両端にそれぞれ接続されるので、主開閉器7をオフした電源遮断時に、スター結線用開閉器8およびデルタ結線用開閉器9を共にオフさせた状態で、三相モータ2の巻線に生じる逆起電力に基づいて、三相モータ2の停止を検知できる、すなわち、逆起電力の検出のためにスター結線用開閉器8またはデルタ結線用開閉器9のいずれかをオンさせる必要がないので、二重化ために主開閉器7を二つ設ける必要がない。
(もっと読む)
ブレーキ付きモータを駆動し制動するモータ駆動装置
【課題】ロボットアームを動かすモータのブレーキ用コイルの損失(発熱)を減らす。
【解決手段】モータ駆動用電源とブレーキ駆動用電源とに共用されるモータ・ブレーキ駆動用直流電源61を有するブレーキ付きモータ2を駆動し制動するモータ駆動装置6において、モータ・ブレーキ駆動用直流電源61をモータ駆動用電源として用いる間、モータ・ブレーキ駆動用直流電源61から受けた電圧をブレーキに印加する電圧変換回路64は、ブレーキ3に印加する電圧を帰還し制御する。
(もっと読む)
サーボモータ監視装置
【課題】サーボモータの動作について適正に異常検知を行う。
【解決手段】 サーボモータ1に接続されたモータ駆動線U,V,Wからサーボモータの磁極位置信号を取り出す磁極位置算定手段20と、サーボモータの位置検出手段からの現在位置信号を入力する現在位置信号入力手段30と、サーボモータの磁極位置信号と現在位置信号の二系統の信号に基づくサーボモータの動作を比較し、不一致が検出された場合に、サーボモータへの電源供給を遮断する停止指令信号を出力する監視手段40とを有している。
(もっと読む)
非常停止装置
【課題】非常停止スイッチを含む非常停止回路に対する常時監視を実現でき、信頼性や安全性の高い駆動源の非常停止装置を提供する。
【解決手段】
電磁接触器MC1のコイル2aとフォトカプラ26の受光素子の直列回路を含むコイル用通電回路18を設ける。非常停止スイッチ6の接点6aと、抵抗器25と、ヒューズ24と、フォトカプラ26の発光素子とが直列に接続された非常停止回路20を設ける。非常停止回路20に短絡や地絡によりヒューズ24が溶断すると、フォトカプラ26の発光素子に通電されなくなり、フォトカプラ26の受光素子が受光されないため、コイル用通電回路18の通電がなくなり、電磁接触器MC1のコイル2aが励磁されなくなる。この結果、電磁接触器MC1の接点2が閉状態から開状態になり、モータ4の作動を停止させる。
(もっと読む)
モータ駆動装置およびその非常停止方法
【課題】2軸結合機械の非常停止時にストレスの少ないサーボ制御装置のモータ駆動装置を提供する。
【解決手段】機械的に結合された2軸を有する多軸の機械でのサーボ制御装置のモータ駆動耕地装置2、3による非常停止を、異常を発生した駆動装置は状態情報をコントローラ1に伝送し、異常を発生した駆動装置はモータ6、7をあらかじめ決められた所定の減速方法で停止させ、ある軸間の偏差以上で異常とし異常を検出した駆動装置は異常を発生した駆動装置の位置情報をもとに所定の方法で停止させるので同期精度を上げることができ、機械のストレスを減少できる。また通信異常等で双方異常で互いに追従し軸間偏差が大きくなり停止しない場合は、一方を停止させることで追従させることができる。
(もっと読む)
1 - 20 / 25
[ Back to top ]