
Fターム[5H540EE02]の内容
リニアモータの制御 (2,479) | 制御、演算 (578) | デジタル要素を含むもの (119) | 計算機を用いるもの (91)
Fターム[5H540EE02]に分類される特許
81 - 91 / 91
リニア同期電動機の制御方法及び装置

【課題】 同期電動機1の磁極位置の推定処理とブレーキ18の開放タイミングを合わせ、推定処理の誤動作や、可動子6の暴走(垂直駆動では落下)を防止する。
【解決手段】 垂直方向に設置されたリニアモータ1での、磁極位置推定処理の開始タイミングを、ブレーキ開放指令後、所定時間だけ遅らせる。例えば、(1)ASR制御系21の推力指令値T*が所定値Trまで増加したこと、(2)可動子6の移動(落下)距離θM、(3)又は可動子6の移動(落下)速度ωMからブレーキの釈放状態を検出し、さらに所定時間後に磁極位置の推定処理を開始させる。
(もっと読む)
交流電力生成装置ならびにそれが用られたリニアモータおよびスターリング冷凍機

【課題】 トランジスタのON抵抗に起因した発熱による悪影響が低減された単相用の交流電力生成装置を提供する。
【解決手段】 三相交流電力を生成するために使用可能な三相用IPM(Inteligent Power Module)において、配線Uから分岐し、U相コントロールとトランジスタGwのゲート電極とを接続する配線W、および、配線Xから分岐し、V相コントロールとトランジスタGzのゲート電極とを接続する配線Zを設ける。また、トランジスタGuとトランジスタGxとの間のノードに接続された出力端子と、トランジスタGwとトランジスタGzとの間のノードに接続された出力端子とを配線Kで接続する。
(もっと読む)
電気的位置決め駆動部を備えた機械
生産機械、工作機械、ロボット等は、電気的位置決め駆動部(4、10)を持つ。該駆動部は、固定子(11)と、少なくとも1つの走行方向に移動可能な可動子(12)を持ち、可動子は、固定子に対し走行方向と異なる少なくとも1つの支持方向において磁場で非接触支持される。位置決め駆動部にセンサ装置(14)が付属し、該装置で支持方向における可動子の固定子に対する変位量を非接触で検出する。位置決め駆動部に制御装置(17)も付属し、制御装置にセンサ装置で検出した可動子の固定子に対する変位量が供給される。制御装置で、支持方向における可動子の固定子に対する変位量と、支持方向での可動子の固定子に対する目標支持位置とに基づき、位置決め磁石システムに対する調整信号を求め、これを磁石システムに供給し、磁石システムにより少なくとも1つの支持方向での可動子の固定子に対する支持位置を非接触に追跡する。  (もっと読む)
(もっと読む)
門型ステージ装置のリニアモータ制御方法
【課題】 迅速に精度良く磁極合わせを行う。
【解決手段】 門型ステージ1と、門型ステージを移動させる二つのリニアモータ30a,30bとを備える門型ステージ装置の制御方法であって、一方のリニアモータ30aのみに対して通電を行うことで、その可動子32aを少なくとも一回ずつ以上正逆それぞれの方向へ移動させ、各移動について、そのリニアモータの固定子31aに対する可動子の通電位相角を求めると共に、各正逆方向のそれぞれの移動ごとに求められた通電位相角を統計処理により一の通電位相角に決定し、同様に、他方のリニアモータ30bのみに対する通電により、当該リニアモータについても一の通電位相角を決定する。
(もっと読む)
リニア直流モータの過熱防止方法
【課題】可動子が移動している場合のみならず、可動子が移動していないにも拘らず高い通電率で通電される不具合発生時の異常発熱時にも対処できるリニア直流モータの過熱防止方法を提供する。
【解決手段】。可動子2の移動が無い場合は、フローチャートのステップS55に示すように、PWM値60%の通電が20秒を超えた段階で通電が停止される。また、可動子2の移動が有る場合は、ステップS50に示すように、これまで積算されたPWM時間積分値が設定値を超えた段階で通電が停止される。この通電停止の際の薄型コイル5の発熱温度は、何れも実験により90〜105℃であることが確認されている。従って、温度ヒューズ6の溶断温度120〜125℃よりも低い。
(もっと読む)
電磁制御弁制御装置およびブレーキ液圧制御装置
【課題】 電磁制御弁制御装置の制御により電磁制御弁を全開状態とする際の衝突音を低減させる。
【解決手段】 左右前輪の各ホイールシリンダの液圧を常閉の増圧弁,減圧弁により電気的に制御し、左右後輪の各ホイールシリンダの液圧を常閉の増圧弁,常開の減圧弁により電気的に制御する。制動終了時に減圧弁を全開状態とし、ホイールシリンダをリザーバに開放して残圧を0にするにあたり、前輪の常閉の減圧弁については、最初に供給する電流を決定し(S18)、その第一初期電流から全開状態電流まで設定値ずつ供給電流を増加させて減圧弁を徐々に開き(S23)、衝突音少なく全開状態とする。後輪の常開の減圧弁については、最初に供給する電流を決定し(S19)、その第二初期電流から全開状態電流まで設定値ずつ供給電流を減少させて減圧弁を徐々に開く(S24)。
(もっと読む)
リニアモータ用位置検出装置
【課題】 リニアモータの位置決め精度を向上する装置を提供する。
【解決手段】 固定子20は、表面磁性が異なる2種類のマグネットを直線移動方向に交互で、一定間隔に配列した構造を備える。可動子30は、固定子20に対して一定間隔を維持しつつ、直線方向に移動自在に配置されコイルを備える。可動子30と一体に設けられる検出ヘッド50は、固定子20の磁束を検出して、制御装置60へ送る。固定されたレーザ測長器100は、可動子に設けたターゲット110に対してレーザビームLBを照射し、その反射光から、レーザ測長器とターゲットとの間の距離寸法を高精度に測定する。マグネットスケールとして利用する固定子20の位置と、測定されたレーザ測長器100の高精度の位置データとを比較し、固定子の位置に対応する補正データを算出し、記憶装置70に記憶し、モータの位置決めに利用する。
(もっと読む)
駆動機構
【課題】、磁性体に供給される信号の極性を制御して、磁性体を被駆動体を駆動させるための駆動源として利用した駆動機構を提供する。
【解決手段】駆動機構は、複数の磁性体を備える組と、この組に周波数信号を供給する手段と、上記磁性体間の吸引―反発による運動を形成する手段と、を備える。この運動が駆動機構の駆動源となる。  (もっと読む)
(もっと読む)
デュアルモード・ボイスコイルモーター・コントローラにおけるD級からリニア・オペレーションへの効率的な遷移
ディスクドライブ・システムのボイスコイルモーター(22)のためのデュアルモード位置決めドライバが開示される。リニア前段ドライバ及びパルス幅変調された前段ドライバ(46)は、両方とも、ボイスコイルモーター(22)を駆動するため「H」ブリッジに配置されるパワー・トランジスタ(50PH、50NH、50PL、50NL)に結合される。このため、位置決めドライバは、リニア・モード又はパルス幅変調されたD級モードのいずれかでパワー・トランジスタ(50)を駆動するように作動する。遷移期間において、パルス幅変調されたモードからリニア・モードにスイッチングする間、コンパレータ(56H、56L)は、「H」ブリッジの位相電圧を参照電圧と比較する。コンパレータ(56H、56L)の出力は、位相電圧がそれらのリニア・バイアス点に向かって事前調整されるように、パワー・トランジスタ(50)を駆動するようにPWM出力増幅器(54H、54L)に供給される。その結果、電流ボイスコイルモーター(22)を介する駆動電流の中断は最小限となる。 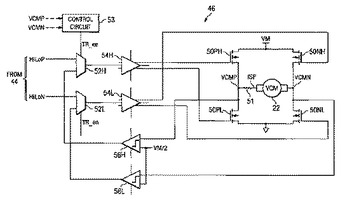 (もっと読む)
(もっと読む)
多相モータ駆動装置、ステージ装置、露光装置
【課題】 駆動電源電圧を高めることなく、モータの各相のコイルに必要な電流を流すことを可能とする多相モータ駆動装置を提供すること。
【解決手段】電流指令値108、109、110に基づき、電流制御方式のドライバ回路105、106、107を使用して、U相コイル101、V相コイル102、W相コイル103からなるリニアモータを駆動する。このとき、電流指令値108、109、110の中から、各タイミングにおける最大値および最小値を最大値検出回路111および最小値検出回路112で抽出する。抽出した最大値および最小値の中点に比例する信号を加算アンプ113により求め、その出力をモータ中性点104に接続して、モータ中性点104の電位を制御する。
(もっと読む)
リニアモータ
【課題】 構造が簡単で製造コストの安い振動防止装置を備えたリニアモータを提供する。
【解決手段】 固定ベース11上に交互に異極が配列され、表面が平板状の界磁部13と、界磁部13に対向して移動磁界を形成する電機子14を有する第1の移動部17とを備えて、第1の移動部17を往復移動させるリニアモータ10であって、界磁部13に対向して移動磁界を形成する電機子21を有する第2の移動部24を備え、第2の移動部24は第1の移動部17の移動方向に対して逆方向に移動し、負荷を含む第1の移動部17から発生する反力を相殺するようにしている。
(もっと読む)
81 - 91 / 91
[ Back to top ]