
Fターム[5H560HA02]の内容
無整流子電動機の制御 (40,007) | 起動 (564) | 高トルク起動 (39)
Fターム[5H560HA02]に分類される特許
1 - 20 / 39
始動発電機の制御装置
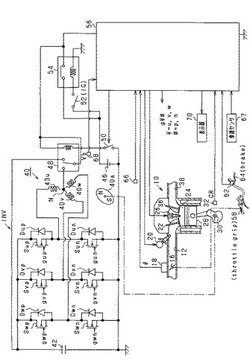
【課題】エンジン10の始動に際しての初期回転の付与手段として発電機(始動発電機40)を併用するに際し、始動発電機40によって生成可能なトルクが小さいために、エンジン10の始動性等が低下すること。
【解決手段】リレー48は、バッテリ46の正極端子を、インバータINVの正極側入力端子と始動発電機40の中性点Nとのいずれかに選択的に接続する。エンジン10の始動に際しては、バッテリ46の正極を中性点Nに接続してインバータINVの入力電圧を昇圧し、インバータINVの入力電圧がバッテリ46の端子電圧Vbであるときよりも生成可能なトルクを増大させる。これにより、始動性を向上させたり、燃料カット制御からの復帰回転速度を低下させて燃費を改善したりすることができる。
(もっと読む)
ブラシレスDCモータのセンサレス制御装置

【課題】 負荷が高い場合でも、モータを早く起動させることができるブラシレスDCモータのセンサレス制御装置を提供する。
【解決手段】 強制転流モード(S2)が終了すると、センサレス制御モードに移行し、この移行直後のセンサレス制御モード(S3)は、電源電流最大値I1をモータの定格電流値I0よりも大きい値に設定して行われる。移行直後のセンサレス制御モード(S3)は、所定時間(T1sec間)に限定して行われ、所定時間経過後は、定常のセンサレス制御モードとされる(S4)。定常のセンサレス制御モード(S4)では、電源電流最大値がモータの定格電流値I0に等しくされる。
(もっと読む)
モータ制御装置
【課題】確実にモータを起動することが可能であり、低コストのモータ制御装置を提供する。
【解決手段】モータ制御装置100は、3相モータ10の起動時に、予め設定された周波数を有するPWM信号でインバータ11が有するトランジスタQ1−Q6を制御するPWM制御部1と、3相モータ10が有する各端子41−43の端子電圧と、予め設定された基準電圧Vrefとを比較する比較部5と、当該比較部5の比較結果に基づいて3相モータ10が有するロータの位置を検出する検出部3と、当該検出部3が周波数に対応する時間内にロータの位置が検出できなかった場合に、PWM信号の周波数を、検出できなかった場合のPWM信号の周波数と異なる周波数に設定する周波数設定部2と、を備える。
(もっと読む)
モーター駆動用電源回路
【課題】DCセンサレスブラシレスモーターを定電流制御の電源構成にて駆動する場合に、モーターの起動失敗とモーター駆動時のモーター停止を抑制したモーター駆動用電源回路を提供することを目的とする。
【解決手段】降圧チョッパー式電源部6と、DCセンサレスブラシレスモーターを駆動するインバータ回路を具備したモーター駆動部2と、モーター駆動部2に流れる電流を検出する負荷電流検出部7と、負荷電流検出部7の検出値に応じて動作する出力電流検出部8と、出力電流検出部8の挙動に応じて出力状態を帰還する出力帰還部10と、基準電圧生成部11と、比較部14と、出力電圧固定部9と、出力電圧の電圧値に応じて出力帰還部10の動作を出力電流検出部8と出力電圧固定部9とに切替える出力帰還切替部15を具備して構成した。
(もっと読む)
トランスミッション用電動ポンプユニット
【課題】 電動モータアセンブリが収容されたトランスミッションハウジングの凹所内の油の粘度が変わっても、常に良好にブラシレスDCモータを起動できるトランスミッション用電動ポンプユニットを提供する。
【解決手段】 トランスミッション用電動ポンプユニット1は、油の吸入および吐出を行うポンプ3とポンプ駆動用のセンサレス制御ブラシレスDCモータ4が一体化された電動ポンプアセンブリ5と、モータ4をセンサレス制御するモータ制御装置6とを備えている。モータ制御装置6が、モータ4の起動時に強制転流を行うものである。電動ポンプアセンブリ5が、トランスミッションハウジング7に形成されて油が導入される凹所内に収容され、モータ4の少なくとも一部が油に浸漬させられている。モータ制御装置6が、モータ4の起動時に、前記凹所内に導入される油の温度を検出し、検出された油温に基づいて強制転流の周波数を設定するものである。
(もっと読む)
同期機械を始動する方法
本発明は、同期機械を始動する方法に関しており、ここでは設定回転トルクM_V1をあらかじめ設定し、同期機械の回転数を始動後に適合させる。ここでこの適合は、第1ステップにおいて上記の設定回転トルクM_V1よりも高い回転トルクM_H1を設定し、引き続き、第2ステップにおいて回転トルクM_H1を設定回転トルクM_V1に減少させることによって行われる。さらに本発明は、同期機械を始動する方法に関しており、ここでは設定回転トルクM_V1をあらかじめ設定し、同期機械の回転数を始動後に適合させる。ここでこの適合は、第1ステップにおいて上記の設定回転トルクM_V1よりも高い回転トルクM_H1を設定することによって行われる。これに続く第2ステップにおいて、この比較的高い回転トルクM_H1を、上記の設定回転トルクM_V1より小さい正の値M_H1aに減少させ、第3のステップにおいて上記の設定回転トルクM_V1に増大させる。  (もっと読む)
(もっと読む)
ドラム式洗濯乾燥機
【課題】脱水工程でモータを確実に起動し、モータ効率を向上して消費電力の低減を図ったドラム式洗濯乾燥機を提供することを目的とする。
【解決手段】インバータ装置でモータが電圧制御で駆動される洗濯工程と弱め界磁制御で駆動される脱水工程とを有する洗濯乾燥機において、前記モータは、ステータコアのスロット中に施された三相巻線の各相に第一の巻線と第二の巻線をそれぞれ分割して有し、洗濯工程では、各相の第一の巻線と第二の巻線を直列接続したY結線で構成してインバータ装置でモータを駆動し、脱水工程では、各相の第一の巻線と第二の巻線を並列接続したY結線で構成すると共に弱め界磁制御によってインバータ装置でモータを駆動した構成において、前記モータのステータコアを構成する電磁鋼板の板厚を0.3mm以下にして脱水工程でのモータの消費電力低減を図る。
(もっと読む)
ブラシレスモータの駆動回路、駆動方法、モータユニット、ならびにそれを用いた電子機器
【課題】モータの回転数を安定化する。
【解決手段】目標回転数判定部60は、駆動対象のブラシレスの振動モータ1の目標回転数に応じたデューティ比を有するパルス変調された制御信号CTLを受ける。目標回転数判定部60は制御信号CTLのデューティ比にもとづき目標回転数を判定し、目標回転数に応じた回転数設定信号S1を発生する。制御部20は、回転数設定信号S1と振動モータ1の回転数を示すFG信号とにもとづき駆動信号を生成する。Hブリッジ回路10は、振動モータ1のコイルに接続され、駆動信号にもとづきコイルの導通状態を制御する。制御部20は、振動モータ1の駆動開始から、FG信号が示す現在の回転数が回転数設定信号S1が示す目標回転数に達するまでの期間、振動モータ1をフルトルクで回転させる。
(もっと読む)
洗濯機
【課題】運転の中断や停止が発生した場合でも、次回の運転開始時に、モータの出力トルクが不足することを回避できる洗濯機を提供する。
【解決手段】ドラムモータを構成するロータマグネットに着磁量を容易に変更可能なレベルの保磁力を有するアルニコ磁石を備え、制御回路が、インバータ回路を介して、アルニコ磁石の着磁量を変化させるように励磁電流を発生させ、洗濯機の運転を停止させる場合に(ステップS11)アルニコ磁石を増磁状態にする(ステップS12)。
(もっと読む)
ブラシレスモータの駆動装置
【課題】ブラシレスモータの起動に際し、誘起駆動前に初期セットを行う駆動装置につき、ブラシレスモータの起動時間の短縮を図ること。
【解決手段】駆動装置は、ブラシレスモータ11の各相コイル14A〜14Cへの通電を順次切り換えてマグネットロータ15を回転させると共に、各相コイル14A〜14Cに生じる誘起電圧に基づきマグネットロータ15の位置を検出し、その検出位置に基づき各相コイル14A〜14Cへの通電を制御する誘起駆動を行うと共に、誘起駆動の前に、マグネットロータ15を初期位置にセットするために各相コイル14A〜14Cへの通電を制御する初期セットを行う。ここで、駆動装置は、各相コイル14A〜14Cへの通電を昇圧させるための昇圧回路16を備え、初期セット中に昇圧回路16に電気を蓄圧しておき、初期セット完了後に蓄圧した電気を誘起駆動のために昇圧回路16から放出して各相コイル14A〜14Cへの通電を昇圧させる。
(もっと読む)
単相ブラシレスDCモータの駆動回路
【課題】正回転時にも逆回転時にも確実な起動を行うことができる単相ブラシレスDCモータの駆動回路を提供する。
【解決手段】磁気センサ7は、ティース4a、4b間の中央である進角0度近傍に配置され、磁気センサ8は、磁気センサ7の位置よりモータ正回転方向に所定の進角を有する。正回転の起動時には、選択回路12は、磁気センサ8の磁極位置検出信号を選択して出力し、制御回路14は、マグネットロータ2の磁極に対してティース4a,4bが斥力を生むモータコイル6の通電方向となるようにスイッチング回路13を制御して起動させる。逆回転の起動時には、選択回路12は、磁気センサ7の位置検出信号を選択して出力し、制御回路14は、マグネットロータ2の磁極に対してティース4a,4bが引力を生むモータコイル6の通電方向となるようにスイッチング回路13を制御して起動する。
(もっと読む)
偏向器、画像形成装置及びモータ制御回路
【課題】モータなどの駆動手段における立ち上げ時間の短縮と、省エネルギーとを両立する。
【解決手段】光ビームを偏向する偏向器は、光ビームを出力する光源と、光ビームを偏向する偏向手段と、偏向手段を駆動する駆動手段と、駆動手段に電圧を印加する電源回路と、駆動手段の回生エネルギーによって充電される蓄電手段とを含む。とりわけ、偏向器は、駆動手段を起動する際に電源回路からの電圧に対し蓄電手段からの電圧を重畳して駆動手段に印加させ、蓄電手段の放電が終了すると電源回路からの電圧を駆動手段に印加させる電圧制御手段とを含む。
(もっと読む)
モータ制御装置、空気圧縮機、空気調和機、乗客コンベアの制御装置及びコンベアの制御装置
【課題】
本発明は同期モータに電流を流すための半導体素子の寿命を延ばすと共に安定した起動を行えるモータ制御装置を提供することを目的とする。また他の目的として、同期モータが搭載された空気圧縮機等の機械を安定して起動し、信頼性の向上を図る。
【解決手段】
同期モータに電流を流すことにより同期モータを制御するモータ制御装置であって、前記同期モータ内部に備えられた温度検出器の検出値を受信する受信部を備えている。そして、同期モータを起動する際には、前記受信部で受信した温度に応じて、前記同期モータに流す電流の大きさを変えることにより安定した起動を図ると共に、半導体素子の長寿命化が可能となる。
(もっと読む)
モータ駆動装置および半導体集積回路装置
【課題】ブラシレスモータの起動時間を短縮し、騒音、および振動を大幅に低減する。
【解決手段】セレクタ21は、モード信号MODEBに基づいて、符号部20から出力されるリミット信号Limit、またはFull−On信号のいずれかを選択して出力する。セレクタ31は、MPU25からのモード信号MODEBに基づいて、出力デコーダ28,29のいずれか信号を選択して出力する。セレクタ30は、モード信号COMMODEに基づいて、出力デコーダ26、出力デコーダ27、またはセレクタ31の出力信号のいずれか信号を選択して出力する。出力デコーダ28と出力デコーダ29とは、モード信号MODEBに基づいて、セレクタ31により選択可能であり、出力デコーダ28が選択された場合には、相通電となり、出力デコーダ29が選択されると3相通電となる。
(もっと読む)
ブラシレスモータの制御装置及びブラシレスモータのロータ停止位置の検出方法
【課題】簡単な構成で短時間に精度良くロータ停止位置を検出できるようにする。
【解決手段】ブラシレスモータのロータ停止位置を検出する際に、3相のコイルに電流を流すときの6つの通電パターン#1〜#6を順番に実施する。通電パターン#1はU相のコイルからV相のコイルに電流を流すもので、インバータ回路に接続されたシャント抵抗の電流値が通電開始と共に徐々に増加する。電流値が過電流閾値に達したら、通電を停止し、ここまでに要した時間を通電時間T1として記憶する。他の通電パターン#2〜#6についても同様の処理を実施すると、通電時間T1〜T6が通電パターン#1〜#6によって異なるので、この性質を利用してロータ停止位置を検出する。
(もっと読む)
モータ起動装置及びモータ起動方法
【課題】起動時間の短縮化を図ることができるという効果を有するモータ起動装置及びモータ起動方法を提供すること。
【解決手段】モータ起動装置100は、オープンループ駆動信号を生成する駆動信号生成手段10と、モータ40に接続されたドライブ回路30とを備え、駆動信号生成手段10は、所定のデータを記憶するデータ記憶部11と、速度データを積算する速度積算部12と、位相調整信号を生成する位相調整信号生成部13と、3相印加電圧を出力する3相駆動信号生成部14と、モータ40の駆動信号を生成するドライブ回路駆動部15とを備え、3相駆動信号生成部14が、位相調整信号に基づいた3相印加電圧をドライブ回路駆動部15に出力することによって、オープンループ駆動を行う。
(もっと読む)
モータ一体型の磁気軸受装置
【課題】回転始動時から低速回転域においてモータ回転の急加速を抑制でき、軸受の異常発熱を抑制して寿命向上を図ることができるモータ一体型の磁気軸受装置を提供する。
【解決手段】このモータ一体型の磁気軸受装置におけるモータ28は、モータロータの位相を検出する位相検出器40を有する3相の無整流子モータである。位相検出器40の出力に基づいてモータステータ28bの各相のコイル28baに電流を印加するコイル電流印加タイミング信号を生成する演算部38と、この演算部38の出力するコイル電流印加タイミング信号に従ってモータステータ28bの各相のコイル28baに電流を印加するパワー回路39とを備える。パワー回路39は、モータコイル28baの線間電圧となるDCバス電圧を制御する電圧可変部41を有する。この電圧可変部41内に設けたチョッパ回路43のパワー素子のスイッチング周波数を可変とする。
(もっと読む)
センサレス突極形ブラシレスDCモータの初期磁極位置推定方法及び制御装置
【課題】 初期磁極位置角を精度良く推定するようにする。
【解決手段】 本発明のセンサレス突極形ブラシレスDCモータ10の初期磁極位置推定方法は、モータ10の駆動装置11に対し、静止直交座標系をなすαβ座標上での高周波によるα軸電圧指令値vα及びβ軸電圧指令値vβとして与え、同モータ10に対し駆動装置11から供給される交流電流を、前記αβ座標上のα軸電流iα及びβ軸電流iβとして検出し、α軸電流iαの振幅とβ軸電流iβの振幅との電流振幅偏差Δiを算出し、駆動装置11へ出力するα軸電圧指令値vα及びβ軸電圧指令値vβを、該電流振幅偏差Δiをなくすようにフィードバック制御し、該電流振幅偏差Δiがなくなると初期磁極位置角θを算出するようにした。
(もっと読む)
モータ駆動装置およびこれを具備した冷蔵庫
【課題】インバータ駆動制御における高効率、高トルク運転、高速駆動が可能なモータ駆動装置を提供する。
【解決手段】永久磁石を有する回転子と三相巻線を有する固定子からなるブラシレスDCモータ6と、前記三相巻線に電力を供給するインバータ5を有し、矩形波または正弦波あるいはそれに準じる波形を、通電角60度以上180度未満の範囲で、PWMデューティが最大となるように出力することで、インバータ5のスイッチング損失を低減し、モータ駆動装置の高効率化を図るものである。
(もっと読む)
電動機の制御方法及び制御装置
【課題】低温時における電動機の運転領域を拡げることができる電動機の制御装置を提供する。
【解決手段】電動機10の制御装置11は、インバータ回路16の入力側にコンデンサ20を備えたインバータ装置12を用いて制御を行う。インバータ装置12はコンデンサ20のESRにより生じるサージ電圧を検出するための入力電圧検出手段22及び入力電圧ピーク値出力手段23を備えている。制御部13はCPU21を備えており、CPU21は最初の制御時に電動機10に供給する初期許容モータ電流値を決定する初期許容モータ電流値決定手段として機能する。CPU21はサージ電圧及び電動機10に流れるモータ実電流に基づいて最大許容モータ電流値を演算する最大許容モータ電流値演算手段と、最大許容モータ電流値を超えないようにスイッチング素子Q1〜Q6を制御する制御手段としても機能する。
(もっと読む)
1 - 20 / 39
[ Back to top ]