
Fターム[5H560HA09]の内容
無整流子電動機の制御 (40,007) | 起動 (564) | 起動のための界磁位置の特定 (198)
Fターム[5H560HA09]に分類される特許
1 - 20 / 198
モータ制御装置
電動オイルポンプ装置
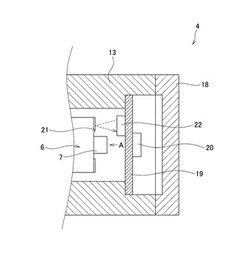
【課題】円滑に起動し、センサレス制御で確実に駆動できるブラシレスモータを備えた電動オイルポンプ装置を提供する。
【解決手段】基板19と対向するロータ6の回転面には、周縁部から中心に向かう白色の線状の検出対象物21が等角度で複数形成されている。基板19には、ロータ6と対向する面上に、発光素子と受光素子の2つの赤外線素子同士が同一方向に並んで配置された反射型フォトセンサである光センサ22が搭載されている。光センサ22の発光部から出た赤外光は、ロータ6の回転面に形成された検出対象物21に反射して光センサ22の受光部に入射する。制御部20は、光センサ22から出力された検出対象物21の検出パターンの情報に基づき、ロータ6の角度位置を演算する。
(もっと読む)
電気機械のロータ角度を推定する方法およびシステム

【課題】電気機械のロータ角度またはロータ位置を精度高く推定する。
【解決手段】永久磁石電気機械117に結合されたエンコーダ115から、位置サンプルが格納される。データ・プロセッサが、連続する位置サンプル間における第1位置変化と、連続する第1位置変化における第2変化とを判定する。データ・プロセッサは、各第1位置変化が全体的に増大しているか、減少しているか、または一定であるか判定を行う。第1位置変化が全体的に増大しているかまたは減少しているかに基づいて、格納された各位置サンプルに補正位置係数が適用される。データ・プロセッサは、位置サンプルの内特定の1つと、それぞれの時点に対応する位置サンプルの特定の1つと関連した、対応する第1位置変化とに基づいて、電気機械の最終ロータ角度を推定する。
(もっと読む)
ブラシレスファンモータの駆動装置、及び始動方法
【課題】簡単な方法で短時間にモータを始動させ、かつ始動時に大きいトルクが得られるようにする。
【解決手段】ブラシレスモータを始動するときは、時間t1からt2の間でロータの停止位置を検出したら、ロータの停止位置に応じた始動励磁パターンを初期通電時間Ts1だけ入力する。その後、通電を停止すると、フリーラン中のロータの回転位置に応じて励磁切り替えタイミング信号に複数の信号SL1,SL2,SL3,SL4が順次発生する。
これら信号SL1〜SL4の中から、2つ目以降の信号SL2〜SL4を使ってロータ位置を検出し、通常の通電切り替え制御に移行する。
(もっと読む)
ブラシレスモータの駆動装置及び始動方法、並びにブラシレスファンモータの駆動装置及び始動方法
【課題】簡単な方法で短時間にモータを始動させ、かつ始動時に大きいトルクが得られるようにする。
【解決手段】ブラシレスモータを始動するときは、時間t1からt2の間でロータの停止位置を検出したら、ロータの停止位置に応じた始動励磁パターンを初期通電時間Ts1だけ入力する。その後、通電を停止すると、フリーラン中のロータの回転位置に応じて励磁切り替えタイミング信号に複数の信号SL1,SL2,SL3,SL4が順次発生する。
これら信号SL1〜SL4の中から、2つ目以降の信号SL2〜SL4を使ってロータ位置を検出し、通常の通電切り替え制御に移行する。
(もっと読む)
ブラシレスモータの駆動装置、ブラシレスモータの始動方法、ブラシレスファンモータの駆動装置、及びブラシレスファンモータの始動方法
【課題】簡単な方法で短時間にモータを始動させ、かつ始動時に大きいトルクが得られるようにする。
【解決手段】ブラシレスモータを始動するときは、時間t1からt2の間でロータの停止位置を検出したら、ロータの停止位置に応じた始動励磁パターンを初期通電時間Ts1だけ入力する。その後、通電を停止すると、フリーラン中のロータの回転位置に応じて励磁切り替えタイミング信号に複数の信号SL1,SL2,SL3,SL4が順次発生する。
これら信号SL1〜SL4の中から、2つ目以降の信号SL2〜SL4を使ってロータ位置を検出し、通常の通電切り替え制御に移行する。
(もっと読む)
モータ制御装置
【課題】モータの磁束を検出し、エンコーダ等の位置検出器を用いずに過渡応答時でも起動時でも正弦波駆動を安価に実現することを可能にするものである。
【解決手段】モータ100にモータの磁束を検出する磁束検出器102が取り付けられている。本実施例では説明の都合上、モータ100は三相の同期モータであるとする。磁束検出器102は図2に示すように、モータの磁石が発生する磁束を検出して、それぞれの位相差が約120度の正弦波状の磁束信号CS1 ,CS2 ,CS3を出力する。3相の巻線うち2相を励磁し、励磁時の前記位置検出手段の検出位置を前記制御手段が前記ブラシレスモータを駆動する出力波形の原点とすることで、起動時から正弦波駆動を可能とし、さらに過渡時においても、常に効率の良い正弦波駆動が安価に実現可能となる。
(もっと読む)
モータ制御装置
【課題】停止位置によらず、かつ負荷特性が変化した場合にも安定にモータを駆動するモータ制御装置、およびそれを用いた駆動装置を提供する。
【解決手段】回転角度位置に関する情報を用いない同期運転モードと回転角度位置に関する情報を用いて駆動する位置センサレス運転モードとを備え、前記運転モードを駆動中に切り替えるモータ制御装置において、機械角1周期もしくは機械角1周期の整数倍で変動する周期トルク成分を推定する手段を備え、周期トルクの傾きがゼロ近傍または負になる期間に運転モードを切り替えることを特徴とするモータ制御装置。
(もっと読む)
モータ磁極位相の調整方法
【課題】
ロータの位相調整を行う場合に、ロータの安定点に対するCW及びCCW両方向からの寄り付き動作の駆動開始点を、CW及びCCW両方向のそれぞれ機械角180゜以内の所定角度から行うようにすると共に、寄り付き動作の駆動開始点を安定点の正逆位相を回避する準備駆動を行うことにより、ロータの正確な安定点を求めるようにしたモータ磁極位相の調整方法を提供する。
【解決手段】
ロータを安定点に対するCW方向の機械角180゜以内の所定角度からCCW方向の安定点へ回転駆動する工程A1と、工程A1における駆動距離B1を計測する工程A2と、ロータを安定点に対するCCW方向の機械角180゜以内の所定角度からCW方向の安定点へ回転駆動する工程A3と、工程A3における駆動距離B2を計測する工程A4と、駆動距離B1及びB2に基づいて励磁原点を求める工程A5とによりモータ磁極位相の調整を行う。
(もっと読む)
インバータ装置
【課題】モータの回転位置センサ信号から演算した検出位置と、モータ誘起電圧の位置との位置誤差を検知するモータ印加電圧を出力するモータおよびインバータ装置を得ること。
【解決手段】通電位相θ*となるモータ電流Iu,Iv,Iwを供給してモータ回転位置を引き込み、通電位相θ*と、モータの回転位置センサからの入力信号から演算した検出位置θsとの位相差を検出位置誤差θeとして検知するモータ印加電圧を制御するモータおよびインバータ装置であって、モータの時計回り方向にモータを回転させてモータ回転位置を引き込む通電位相と、モータの反時計回り方向に回転させてモータ回転位置を引き込む通電位相とを出力する初期調整手段を有することを特徴としている。
(もっと読む)
モータ駆動装置、それを用いたファン制御装置およびヒートポンプ装置
【課題】モータが運転停止後も慣性によって回転している状態から再起動する場合に、インバータへの過電圧や過電流などの異常を発生させずにモータを起動させることができるモータ駆動装置を提供する。
【解決手段】モータ駆動装置20では、マイクロコンピュータ30は、室内ファン15を駆動するファンモータ51を停止させる際、ファンモータ51の回転数を所定回転数まで低下させた後にインバータ25を停止する。ファンモータ51はブラシレスDCモータであって、起動後はロータ位置センサレス制御によって駆動される。ファンモータ51の回転数を所定回転数まで低下させた後にインバータ25を停止することによって、モータを再起動させるときの回転数は所定回転数以下となっている。
(もっと読む)
電気掃除機
【課題】電気掃除機の起動指示後、瞬時にファンモータが起動する、使用感に優れた電気掃除機を実現すること。
【解決手段】ファン、およびファンを駆動する機能を有するインバータ回路と、外部から停止指令が入力された後に、ファンモータの減速を行った後で位置決めを行い運転停止する機能を有した制御手段とを備えたことにより、速やかな運転立ち上げがなされ、使用感に優れ確実な起動が実施される信頼性の高い電気掃除機を実現することができる。
(もっと読む)
駆動装置、及び駆動方法
【課題】モータの負荷が大きい場合において誘起電圧に基づいてモータを駆動させる。
【解決手段】駆動装置は、モータのコイルに通電するインバータ回路と、各コイルに生じる誘起電圧と等価中性点電位との比較結果を示すパルス信号を生成する誘起電圧インターフェース回路と、コイルに流す電流の向きを示す複数の通電パターンを用いて通電を行い、所定の電流値に達するまでの通電時間に基づいてロータが停止している位置を検出する停止磁極位置検出部と、停止磁極位置検出が検出したロータの位置に基づいて選択した通電パターンで通電を行いロータにトルクを加えた後に、誘起電圧インターフェース回路が出力するパルス信号のレベルに基づいてロータにトルクを加える通電パターンを選択し、選択した通電パターンで通電をインバータ回路に行わせる起動通電を行った後に誘起電圧に基づいた制御を行う通電制御部とを備える。
(もっと読む)
ブラシレスモータの駆動装置
【課題】パルス誘起電圧に基づく通電モードの切り替えタイミングの判定をより安定して行え、脱調の発生を未然に抑制できるブラシレスモータの駆動装置を提供する。
【解決手段】3相ブラシレスモータの3相のうちの非通電相に、パルス印加電圧によって誘起されるパルス誘起電圧と閾値とを比較して、通電モードの切り替えタイミングを判定するセンサレス制御を行う。ここで、パルス印加電圧のデューティ制御におけるデューティ比を、パルス誘起電圧の振れ時間,A/D変換時間,電圧検出回路の分解能などに基づき設定した下限値以上に制御する。これによって、パルス誘起電圧の振れ時間内でパルス誘起電圧をサンプリングしたり、A/D変換中にパルス電圧の印加が停止されてしまうことを抑制でき、パルス誘起電圧の検出精度が向上して、脱調の発生を抑制できる。
(もっと読む)
駆動装置、及び停止位置検出方法
【課題】モータの駆動を開始する際におけるロータの位置の検出において、モータに電力を供給する電源装置にかかる負荷を抑える。
【解決手段】駆動装置は、コイルごとに設けられたスイッチング素子を有し、スイッチング素子のオンとオフとを切り替えてコイルに通電するインバータ部と、コイルに流す電流の向きを示す複数の通電パターンから順に1つずつ選択し、選択した通電パターンに基づいてスイッチング素子のオンとオフとを、電源装置が供給できる最大電流値に応じたデューティ比で切り替えてコイルに通電させる通電パターン決定部と、通電パターンごとに、コイルに流れる電流の電流値が目標電流値に達するまでの時間である通電時間を計測する電流印加時間計測部と、電流印加時間計測部が計測した通電パターンごとの通電時間に基づいて、ロータが停止している位置を推定するロータ停止位置推定部とを備える。
(もっと読む)
モータの磁極位置推定方法
【課題】磁極位置推定結果が真値に対して電気角90度以上ずれていた場合においても、不安全動作を引き起こすことのない磁極位置推定方法を提供する。
【解決手段】仮の磁極位置を基準に電気角半周期をN分割した位相に電流を印加し、そのときの移動方向D(+,0,−)を判定するステップ1と、移動方向の符号が反転する電気角領域を2分割した位相に電流を印加し、そのときの移動方向D1を判定するステップ2と、移動方向が+から0および0から−に変化する電気角領域をそれぞれ2分割した位相に電流を印加し、そのときの移動方向D2を判定するステップ3と、移動方向が0となる電気角領域の中間点を発生電磁力が零となる位相と決定するステップ4と、発生電磁力が零となる位相から90°ずらした位相を発生電磁力が最大となる位相と決定するとともに電流を印加し、その時の移動方向D3を判定するステップ5とを備える。
(もっと読む)
ブラシレスモータ起動装置および起動方法
【課題】ロータ停止位置判定の誤差を少なくすることのできるブラシレスモータ起動装置および起動方法を提供する。
【解決手段】実施形態のブラシレスモータ起動装置1は、誘導電圧検出回路11が、ブラシレスモータ101の界磁コイルLU、LV、LWの中性点CN1に発生する界磁コイルの誘導電圧と、界磁コイルLU、LV、LWに並列に接続された抵抗RU、RV、RWの共通接続点である仮想中性点CN2に発生する仮想中性点電圧と、の差電圧に比例する電流を生成する。ブラシレスモータ起動装置1は、積分回路12が、1対の通電相に順方向および逆方向の電流を流したときに誘導電圧検出回路から出力される電流を、それぞれ一定期間、積分する。ブラシレスモータ起動装置1は、極性判定回路13が、積分回路12の積分値の極性を判定する。
(もっと読む)
圧縮機駆動装置
【課題】
三相センサレスDCブラシレスモータによって圧縮機の圧縮機構部を駆動するインバータを備えた圧縮機駆動装置には、低コストで高効率な省エネルギー性が求められている。
【解決手段】
インバータの三相スイッチング回路は、電圧の印加方向に沿って上流側となるIGBTおよび下流側となるスーパージャンクションMOSFETまたはSiC−MOSFET素子を備え、DCブラシレスモータの起動時に、1つのIGBTをオンするとともに別の直列回路の2つのスーパージャンクションMOSFETまたはSiC−MOSFET素子をオンしてDCブラシレスモータのロータの位置決めを行う位置決め通電手段を備えた。
(もっと読む)
モータ制御装置
【課題】3相モータをスムーズに且つ素早く起動することが可能なモータ制御装置を提供する。
【解決手段】モータ制御装置100は、動作命令及び停止命令に基づいてインバータが有するスイッチング素子に通電して3相モータ7の回転を制御する通電制御部50と、停止命令に基づき、次の動作命令とは無関係に通電制御部50に対して3相モータ7が有する3つの端子のうち予め設定された2つの端子間への通電及び当該通電の停止を指示する通電指示部10と、を備える。
(もっと読む)
モータ制御装置
【課題】起動モードにおいて負荷の変動に追従した回転制御を実行するモータ制御装置を提案する。
【解決手段】この提案のモータ制御装置は、相電流Iu〜Iwに基づいて電流波高値Ip及び電流電気角θiを検出する検出手段4と、相電流Iu〜Iwと印加電圧Vu〜Vwとに基づいて誘起電圧波高値Ep及び誘起電圧電気角θeを検出する検出手段5と、θm=θi−β−90°又はθm=θe−γ−90°を使用してロータ位置θmを検出するロータ位置検出手段6と、そのθmに基づいて回転速度ωを検出する速度変動検出手段15と、起動用電圧指示値Vp及び起動用電圧位相指示値θvを出力し、同期モータMの回転速度を所定の加速度で上昇させると共に、速度変動検出手段15で検出される回転速度ωをθvに反映させる起動手段10と、を備える。
(もっと読む)
1 - 20 / 198
[ Back to top ]