
Fターム[5H560XA05]の内容
無整流子電動機の制御 (40,007) | 制御方式 (6,312) | フィードバック制御 (2,621) | 位置フィードバック(位置決め) (219)
Fターム[5H560XA05]に分類される特許
1 - 20 / 219
モータ駆動装置、シート搬送装置及び画像形成装置
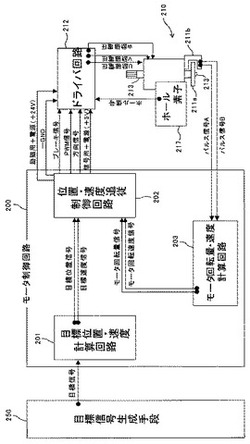
【課題】DCブラシレスモータを駆動源として用いて被駆動体の速度を自在に調整するとともに、回転センシング信号へのノイズの混入に起因するモータ回転の不安定化、及び負荷変動に起因する第1搬送ローラ16aの速度不安定化を抑える
【解決手段】DCブラシレスモータからなる搬送モータ210の励磁コイルの切り替えタイミングをドライバ回路212に把握させるために搬送モータ210の回転量を検知するホール素子217とは別に、同回転量をホール素子217よりも高精度に検知するモータエンコーダ211を搬送モータ210に搭載するとともに、ドライバ回路212を搬送モータ210に搭載し、モータエンコーダ211による検知結果に基づいてドライバ回路212からコイルに供給される励磁電圧の量を調整することで、搬送モータ210の回転速度を調整する速度調整処理を実施するように、モータ制御回路210を構成した。
(もっと読む)
ブラシレスモータの駆動制御装置およびハンチング防止方法

【課題】ハンチングを未然に防止する。
【解決手段】ステータに設けられた複数相の電機子コイルに流す電流を制御することにより、ロータを回転させるブラシレスモータの駆動制御装置1は、複数相の電機子コイルに対して通電を行なうインバータ回路2と、インバータ回路2を駆動するための駆動信号を生成するプリドライブ回路3と、単位時間ごとにロータの回転位置を検出するとともに、検出された回転位置に同期して単位時間ごとにパルス列が変化する複数のパルス信号を生成する回転位置検出器5と、ロータの回転方向が逆回転方向から正回転方向に変化する際に、プリドライブ回路3に対して駆動信号のオンデューティ比を増大させるデューティ指令部11と、を備える。
(もっと読む)
モータ駆動装置、シート搬送装置及び画像形成装置
【課題】ドライバ回路に入力される回転センシング信号へのノイズの混入に起因するモータ回転の不安定化と、モータ起動時のギヤ歯の衝突に起因するギヤの寿命低下とを抑えつつ、搬送モータによって第1搬送ローラ16aを迅速に加速する。
【解決手段】DCブラシレスモータからなる搬送モータ210の回転量を検知するモータエンコーダ211と、ドライバ回路212とを搬送モータ210に搭載し、モータ起動時にて、搬送モータ210の回転速度を第1加速特性で加速させるように搬送モータ210を駆動しながら、モータエンコーダ211による検知結果と第1加速特性とに基づいて把握したタイミングが到来した後に、搬送モータ210の回転速度を第1加速特性よりも加速性に優れた第2加速特性で加速させるように搬送モータ210を駆動する加速度変更処理を実施するようにモータ制御回路200を構成した。
(もっと読む)
駆動装置及びそれを備えた画像形成装置
【課題】画像品質を向上させることができる駆動装置及びそれを備えた画像形成装置を提供する。
【解決手段】駆動装置は、位置・速度追従制御器130を備え、位置・速度追従制御器130は、PID制御器140と、減算器131と、PWM回路133と、ゲイン設定部134と、ゲイン設定指示部135と、を備え、ゲイン設定指示部135は、DCモータ101がホールド状態になった時刻以降において、位置偏差が予め定められた閾値以下、かつ、一定時間経過後に、ゲイン設定部134にホールド時ゲインを設定させ、スルーアップ制御が開始された場合に、ゲイン設定部134に駆動時ゲインを設定させる構成を有する。
(もっと読む)
駆動装置及びそれを備えた画像形成装置
【課題】ホールド制御時に発生するモータ振れを従来のものよりも短時間で抑制することができる駆動装置及びそれを備えた画像形成装置を提供する。
【解決手段】駆動装置は、位置・速度追従制御器130を備え、位置・速度追従制御器130は、PID制御器140と、減算器131と、PWM回路133と、ゲイン設定部134と、ゲイン設定指示部135と、位置偏差補正部136と、を備え、ゲイン設定指示部135は、減算器131が出力する位置偏差が予め定められた±eパルス相当であり、かつ、その位置偏差がホールド状態になったホールド時から予め定められたt時間継続した場合は、ゲイン設定部134に、位置偏差をキャンセルするために予め実験により取得されたホールド時ゲインを設定させる構成を有する。
(もっと読む)
モータ駆動装置及び記録装置
【課題】ホール素子自体の実装位置がずれている場合であっても、あるいは加減速を頻繁に繰り返す駆動形態においてもモータの駆動上の誤差を正確に補正すること。
【解決手段】モータ駆動装置であって、複数相のコイルと、ロータの回転に応じて電圧を出力する複数の検出手段とを有するブラシレスモータと、制御信号に基づいて前記複数相のコイルに対する電流の供給先を切り替えることによって、前記ブラシレスモータを駆動する駆動手段と、前記複数の検出手段から出力される検出信号と、前記ロータの回転角に応じた予め求めた電圧と前記複数の検出手段から得られる前記ロータの回転角に応じた電圧との差に基づいた補正信号との加算結果に基づいて、前記制御信号を生成する生成手段とを備える。
(もっと読む)
同期電動機の駆動システム及び同期電動機
【課題】
位置センサを用いない同期電動機においては、同期電動機の発生する誘起電圧(速度起電圧)に基づいて位置を求めているため、誘起電圧の小さい零速度近傍(停止状態)や低速度域では誘起電圧の検出感度が低下してしまい位置情報がノイズに埋もれるという課題があった。
【解決手段】
同期電動機の三相固定子巻線の2相を順次選択して駆動する際に、非通電相への誘起電圧を検出し、この非通電相の誘起電圧と回転子位置情報を予め関係付けしておき、検出した誘起電圧から回転子位置情報を逆算することで回転子の位置推定を行い、更にその回転子位置情報の変化率から回転速度の検出を行って位置制御や速度制御を高精度に実現する。
(もっと読む)
モータ制御装置
【課題】方形波駆動用のブラシレスモータに改造を加えることなく、モータ制御装置のロジック変更のみで推定角度の分解能を向上させ正弦波駆動させる。
【解決手段】モータ制御装置の制御部3において、パターン変換部12は、2π/3radずつ位相のずれた回転位置信号U,V,Wの値の組み合わせに対応するパターン番号を、パターン情報保持部11が記憶しているパターン情報に従って決定する。角速度算出部15は1つの回転位置信号の立ち上りから次の立ち上りまでの時間間隔から、サンプル時間あたりのロータの角速度を求める。断続角度算出部13がパターン番号にπ/3radを乗じて断続角度を求め、連続角度算出部18が断続角度にサンプル時間毎に角速度を加算して連続角度にする。
(もっと読む)
永久磁石同期電動機の永久磁石の不可逆減磁が発生したか否かを検出する制御装置
【課題】永久磁石同期電動機の駆動軸の動作範囲が制限された場合でも永久磁石同期電動機の磁石の不可逆減磁が発生したか否かを適切に検出することができる制御装置を提供する。
【解決手段】正弦波状指令信号生成部17は、永久磁石同期電動機3へのトルク指令に対する正弦波状指令信号を生成する。推定トルク定数計算部23は、正弦波状指令信号の複数周期に亘る同一の動作状態での複数の電流値と複数の加速度値から取得した電流代表値及び加速度代表値と、永久磁石同期電動機3に関連する予め設定されたイナーシャとから、永久磁石同期電動機3に関連する推定トルク定数を計算する。減磁検出部24は、推定トルク定数と永久磁石同期電動機3に関連する予め設定されたトルク定数との差分に基づいて、永久磁石同期電動機3の永久磁石34a,34b,34c,34dに不可逆減磁が発生したか否かを検出する。
(もっと読む)
アクチュエータ、モータ制御システム、及びモータ制御方法
【課題】信頼性又はロバスト性を向上したアクチュエータ、モータ制御システム、及びモータ制御方法を提供する。
【解決手段】アクチュエータは、モータと、モータの回転角を検出する回転角センサと、モータの回転を所定の変位に変換する被駆動機構と、被駆動機構の変位を検出する位置センサと、モータを制御する制御装置と、を含み、制御装置は、正常時における回転角センサの回転角信号及び位置センサの変位信号の相対関係情報を記憶しており、変位信号を取得し、相対関係情報に基づいて回転角を推定した推定回転角信号を演算し、推定回転角信号に基づいてモータを制御する。
(もっと読む)
駆動装置、画像形成装置および画像形成装置の周辺装置
【課題】高効率であるとともにステッピングモータと同等の加減速時の追従性やモータの耐久性を得ることができる駆動装置、画像形成装置および画像形成装置の周辺装置を提供する。
【解決手段】駆動源としてのインナーロータ型DCブラシレスモータであるモータ101と、モータ101の出力軸の回転量と回転方向を検知するフォトセンサ122、エンコーダディスク123と、モータ101の回転を制御する制御回路121と、制御回路121からの信号に基づいてモータ101に駆動電力を供給するドライバ回路125と、を備える駆動装置151において、制御回路121が、外部から取得したモータ101の目標駆動信号と、フォトセンサ122、エンコーダディスク123から検出される検出信号とに基づいて、ドライバ回路125への信号を変化させることで、モータ101の回転速度または回転位置の少なくとも一方を制御する。
(もっと読む)
電動機制御装置
【課題】コストアップを招くことなく常に電動機を正常に制御電動機制御装置を得る。
【解決手段】位置センサ信号θdに基づき位置センサDu、Dv、Dwの故障を判定して故障判定信号Fを生成し、かつ第1の位相θ1を生成する位置センサ故障判定手段10と、故障判定信号Fおよび位置センサ信号θdに基づき電動機2の回転速度ωを演算する回転速度演算手段9と、第1の位相θ1、故障判定信号Fおよび回転速度ωに基づき位相指令θrを生成する位相指令生成手段11と、電動機2に対する駆動信号の大きさを表す振幅指令Arを生成する振幅指令生成手段7と、位相指令θrおよび振幅指令Arに基づき駆動信号を電動機2に印加する通電手段12とを備える。位相指令生成手段11は、故障判定信号Fが位置センサの一部故障を示す場合には、第1の位相θ1と、第1の位相θ1および回転速度ωに基づく第2の位相θ2とを用いて位相指令θrを生成する。
(もっと読む)
アクチュエータシステム
【課題】 出力軸の位置決め精度を向上させることができるアクチュエータシステムを提供する。
【解決手段】 本アクチュエータシステムは、入力軸と出力軸を有し当該入力軸から入力された回転を減速して当該出力軸から出力する減速機と、前記入力軸を内部に有するとともに電気的な突極性を有し当該入力軸を回転させるモータと、前記出力軸に設けられ当該出力軸の回転角度を検出するエンコーダと、前記モータへの高周波電圧の印加により当該モータに流れる高周波電流を検出する電流検出手段と、前記電流検出手段による検出結果から前記モータのトルクおよび回転速度を推定する推定手段と、を備え、前記エンコーダにより検出された回転角度と前記推定手段により推定されたトルクおよび回転速度をそれぞれフィードバックすることにより前記出力軸の回転制御を行うことを特徴とする。
(もっと読む)
モータの磁極位置補正方法
【課題】ダイレクトドライブモータを採用した可動範囲が限定された駆動軸において、ダイレクトドライブモータと位置検出器の取付け誤差を制御装置内で補正する方法を提供する。
【解決手段】モータの磁極位置補正方法は、ダイレクトドライブモータの可動子を機械式ブレーキで拘束し(S9)、指令位置を現在位置と離れた位置に指令し(S10)、ダイレクトドライブモータのトルク指令値を検出し(S12)、トルク指令値と所定の閾値とを比較することにより磁極位置補正値を決定し(S14、S16)、前記決定された磁極位置補正値をメモリに記憶し(S18)、メモリに記憶した磁極位置補正値により求めた電気角オフセット値をモータ制御に用いる。
(もっと読む)
モータ駆動制御装置
【課題】鎖交磁束の波形に含まれる高調波成分の影響を除去してトルクリプルを抑制できるモータ駆動制御装置を提供する。
【解決手段】モータ駆動制御装置において、回転子の角度検出値に基づいて変化するd軸交流信号をコイルに流すd軸電流の目標値であるd軸電流目標値に加算し、前記角度検出値に基づいて変化しd軸交流信号に対して1/4周期の位相差をもつq軸交流信号をコイルに流すq軸電流の目標値であるq軸電流目標値に加算する加算手段を有する。そして、d軸交流信号が加算されたd軸電流目標値に追従するようにd軸電流を制御し、q軸交流信号が加算されたq軸電流目標値に追従するようにq軸電流を制御する。
(もっと読む)
モータ制御装置
【課題】直流電源に接続されたインバータ及び平滑コンデンサと、インバータで駆動される交流モータとを備えたモータ制御システムにおいて、交流モータで電気エネルギを消費して平滑コンデンサの電荷を放電する際に交流モータの意図しない回転を抑制する。
【解決手段】平滑コンデンサ33に蓄えられた電荷を放電する際に、ロータ回転位置センサ34で検出したロータ回転位置と目標位置との偏差を小さくするように交流モータ12の指令電圧ベクトルを制御する回転位置F/B(フィードバック)制御を実行する。その際、放電開始時に回転位置センサ34で検出したロータ回転位置を目標位置として設定することで、回転位置F/B制御によって、交流モータ12のロータ回転位置を放電開始時のロータ回転位置付近に維持する。これにより、交流モータ12をほとんど回転させないようにすることが可能となり、交流モータ12の回転による不具合を確実に防止する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】回転角速度検出を行うことなく、精度よく、電力供給経路における通電不良の発生を検出することのできるモータ制御装置を提供すること。
【解決手段】通電不良検出部は、通電状態にあるべき特定相(X=U,V,W、|Ix*|>I2)の相電流値が非通電状態を示す値(|Ix|<I1)であり、且つ他相の相電流値が通電状態を示す値(|Iy|>I3)である場合には、その特定相に通電不良の発生を示す異常があると判定する。
(もっと読む)
自動ドア施錠機構
【課題】 ロータリエンコーダの回転位置信号を用いてサーボモータを位置制御し、自動ドア装置のドア位置を固定する施錠機構は、ロータリエンコーダを収容するためのスペースを必要とし、自動ドア装置を小型化するためには好ましくない。また、ロータリエンコーダ等がコストアップの要因となる。
【解決手段】 ブラシレスモータに本来備わっている複数のホール素子を用いて、駆動用磁石の主磁極から直接、検出信号を複数の正弦波として得る、位置検出手段をもつブラシレスモータと、位置信号検出手段と、位置制御サーボによる制御手段と、からなる自動ドア装置の施錠機構を提供する。
これにより、ロータリエンコーダやレゾルバ等の回転位置検出装置を不要とした。
(もっと読む)
モータ制御装置、それを用いた画像形成装置、モータ制御装置の制御方法、及びモータ制御装置の制御プログラム
【課題】位置偏差を早く解消して必要な精度を維持することができ、かつ、より簡単な制御で位置制御を行えるモータ制御装置を提供する。
【解決手段】画像形成装置の制御回路は、ブラシレスモータを制御し駆動させる。制御回路は、モータの起動時からモータが所定の速度ポイントに到達するまでの間の区間Aに、略一定の加速指令に基づいてモータを加速させ、その後、モータが目標回転速度をオーバーシュートし加速度が略ゼロになるまでの区間Bに、モータを速度制御する。制御回路は、モータが加速度ゼロポイントに達してから位置偏差が解消される地点に到達するまでの区間Cに、モータの位置制御を開始する。制御回路は、モータが目標速度に到達するまでに発生した負の位置偏差量に応じて、その後、モータの回転速度を積極的にオーバーシュートさせることで、その位置偏差量を解消する。したがって、モータの起動時に発生する位置偏差がより早く解消される。
(もっと読む)
交流回転機の制御装置
【課題】2組の三相巻線を有する交流回転機に対し、各組で位相の異なる搬送波に基づいて三相電圧を三相巻線へ出力する際、搬送波の位相のずれによる電流検出のタイミングのずれが生じても、応答の良好な制御性能が得られる交流回転機の制御装置を得る。
【解決手段】第1の搬送波および第1の搬送波と位相の異なる第2の搬送波を生成し、第1,第2の搬送波に基づいて第1,第2の電流検出信号を生成する電力変換手段と、第1の電流検出信号に基づいて第1の三相巻線に流れる電流を検出し、第1の電流検出値を出力する第1の電流検出手段と、第2の電流検出信号に基づいて第2の三相巻線に流れる電流を検出し、第2の電流検出値を出力する第2の電流検出手段とを備え、第2の電流検出手段は、第1,第2の搬送波の位相差に基づいて第2の電流検出値を補正する。
(もっと読む)
1 - 20 / 219
[ Back to top ]