
Fターム[5H572DD08]の内容
Fターム[5H572DD08]に分類される特許
1 - 20 / 35
ステッピングモータ制御装置
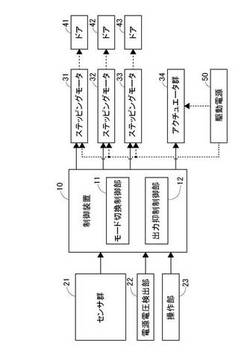
【課題】実効電力を減少させつつ、ユーザに違和感の少ないアクチュエータ機能を実現するステッピングモータ制御装置を提供すること。
【解決手段】ステッピングモータ31〜33の駆動を制御する制御装置10と、制御装置10に含まれ、電源電圧検出部22が検出する電源電圧に基づいて、ステッピングモータ31〜33の駆動モードを、低トルク高速駆動させる通常モードと高トルク低速駆動させる低電圧モードとに切り換えるモード切換制御部11と、モード切換制御部11に含まれ、電源保護条件の成立時には、ステッピングモータ31〜33を同時に複数駆動させる場合、駆動モードを低電圧モードとするとともに、低電圧モードによる低周波の出力信号の少なくとも一部をPWM波形の出力信号とする出力抑制処理を実行する出力抑制制御部12と、を備えていることを特徴とするステッピングモータ制御装置とした。
(もっと読む)
通信システム、送信回路、受信回路及び画像形成装置

【課題】複数のパルス信号を多重し、かつ、パルス幅の変動を抑える通信システムを提供する。
【解決手段】複数のパルス信号について、各サンプリング・タイミングにおける各パルス信号の振幅を示す値を含む多重信号を生成して送信する送信回路10と、多重信号を受信して複数のパルス信号を出力する受信回路20と、を備えている通信システムであって、送信回路10は、各パルス信号について、サンプリングにより生じるエッジ位置の誤差量を検出するカウンタ103と、検出した誤差量を示す値を多重信号に含めるPS変換部104と、を備えており、受信回路20は、多重信号を分離して各パルス信号の振幅を示す値及び各パルス信号の前記誤差量を示す値を出力するSP変換部201と、各パルス信号について、SP変換部201が出力するパルス信号の振幅を示す値から得られるエッジ位置を、当該パルス信号の誤差量で補正する補正部と、を備えている。
(もっと読む)
駆動装置
【課題】単相モーターと二相モーターとを備えるものにおいて、信号を電圧に変換する信号変換器の数の削減する。
【解決手段】搬送モーター66を回転させると共にキャリッジモーター78aをADF読取回転角で停止させる際には、制御部52からは、信号DA0,DA1をD/A変換器90,91に出力すると共に通電許容禁止信号ENB1をキャリッジモーターA相駆動回路97に出力する。そして、D/A変換器90,91で信号DA0,DA1を電圧Vda0,Vda1に変換する。そして、搬送モータードライバー92では、電圧Vda0に基づいて搬送モーター66への通電を行ない、キャリッジモータードライバー95では、電圧Vda0と通電許容禁止信号ENB1とに基づいてA相への通電や通電停止を行なうと共に電圧Vda1に基づいてB相への通電を行なう。
(もっと読む)
駆動回路、及び空気調和機の室内機用駆動回路
【課題】アクチュエータの駆動源に接続される配線を小径化し、当該配線と接続される制御基板上のコネクタの大型化防止を可能とする。
【解決手段】室内機1に備えられ、複数のフラップ毎に設けられたフラップ用モータM1〜M4を駆動する駆動回路であって、フラップ用モータM1〜M4を動作させるドライバ素子と、当該ドライバ素子のうち対応するドライバ素子と接続される1つのコモン接点、及び同一番号の接点が1つのフラップ用モータに接続されてなる切換接点を有する切換スイッチと、各切換スイッチの切換接点を同一番号の切換接点に切り換える切換信号を切換スイッチに出力する切換信号出力部、及びフラップ用モータM1〜M4を駆動する駆動信号をドライバ素子に出力する駆動信号出力部を有するマイコン101を備える。
(もっと読む)
モータ駆動回路
【課題】2つのHブリッジ回路に共通のモータコイルを駆動させる際に配線を簡素化することができるモータ駆動回路を提供する。
【解決手段】モータ駆動回路は、直列に接続された第1ソーストランジスタ及び第1シンクトランジスタと、直列に接続された第2ソーストランジスタ及び第2シンクトランジスタとを有する第1Hブリッジ回路と、直列に接続された第3ソーストランジスタ及び第3シンクトランジスタと、直列に接続された第4ソーストランジスタ及び第4シンクトランジスタとを有する第2Hブリッジ回路と、第1及び第2ソーストランジスタと第3及び第4シンクトランジスタとを同期してオンまたはオフし、第1及び第2ソーストランジスタと第3及び第4シンクトランジスタとは相補的に、第3及び第4ソーストランジスタと第1及び第2シンクトランジスタとを同期してオンまたはオフする第1制御回路と、を備える。
(もっと読む)
モータ
【課題】制御回路を含む複数のモータを全体で低コスト化する。また、小型化、軽量化も実現する。
【解決手段】片方向電流すなわち直流電流で駆動可能な複数個のモータを、モータを選択する電力供給手段STと、直列に接続した各相巻線Wmへそれぞれに直流電流を供給する多相の相電流通電手段TRmとで駆動する。前記相電流通電手段TRmを複数のモータで共通化して使用することにより、全体での低コスト化、小型化、軽量化を実現する。また、モータを選択的に制御するだけでなく、時分割制御により複数のモータを並行して速度制御あるいは位置制御も可能とする。
(もっと読む)
記録媒体再生装置およびモータ駆動方法
【課題】ブラシモータ内の絶縁物によって動作が停止した際に動作状態に復帰することができる記録媒体再生装置およびモータ駆動方法を提供する。
【解決手段】光ディスク装置1で光ディスク50を再生中にブラシモータで構成されたキャリッジモータ9が動作不能となった場合に、マイコン36がスピンドルモータ8の正回転およびブレーキをかける動作を繰り返してキャリッジモータ9およびスピンドルモータ8が設けられている移動シャーシ4全体を振動させる。
(もっと読む)
位置決め制御装置および工作機械
【課題】位置決め制御装置においてスループットを低下させずにモータの発熱を抑える。
【解決手段】位置決め制御装置は、第1の被駆動部材を移動させる第1のモータ54と、第2の被駆動部材を移動させる第2のモータ64と、第1および第2のモータのそれぞれに対して2自由度制御を行い、第1の被駆動部材を第1の目標位置に移動させ、第2の被駆動部材を第2の目標位置に移動させる制御手段51,53,61,63とを有する。制御手段は、第1の被駆動部材を第1の目標位置に移動させるために第1のモータの動作に必要な第1の時間Txと、第2の被駆動部材を第2の目標位置に移動させるために第2のモータの動作に必要な第2の時間Tyとを求め、第1および第2の被駆動部材をそれぞれ第1および第2の目標位置に移動させる際に、第1および第2のモータを、第1および第2の時間のうち長い方の時間で同時に動作させる。
(もっと読む)
ステッパモータコントローラ
複数のステッパモータを、単一のマイクロコントローラ出力セットで制御する方法では、デマルチプレクサを使用して、単一のマイクロコントローラ出力セットを分離して、複数のステッパモータに対応する個別制御信号群を生成する。  (もっと読む)
(もっと読む)
モータ
【課題】共通の回転軸に設けた複数のステータに少ない数の駆動回路でモータ電流を供給した場合でも、十分な回転数およびトルクを得ることのできるモータを提供すること。
【解決手段】ステッピングモータ100では、モータ部20を複数、モータ軸線L方向に配列し、複数のモータ部20の間において極歯215、225、265、275の角度位置を同一にしてあるため、大きなトルクを得ることができる。モータ部20のステータコイル24同士およびステータコイル29同士を直列に接続し、その分、駆動回路からの出力電圧を高く設定してある。このため、ステータコア24、29に十分なモータ電流を供給することができるので、十分な回転数やトルクを得ることができる。
(もっと読む)
モータ駆動装置及び光学制御装置
【課題】高速駆動が可能で、かつ、複数のモータ駆動時における精度劣化を抑制するモータ駆動装置を提供する。
【解決手段】モータ駆動装置は、第1コイルへの通電の切り替えによって回転する第1ロータを備えた第1モータ108と、第1モータ108を駆動する第1ドライバ107と、第2コイルへの通電の切り替えによって回転する第2ロータを備えた第2モータ111と、所定の時間間隔に従って第2モータ111の第2コイルへの通電を切り替える第2ドライバ109と、位置センサ112の出力に応じて第2モータ111の第2コイルへの通電を切り替える第3ドライバ110と、第1モータ108を駆動するとともに第2モータ111を駆動する際には、第3ドライバ110ではなく第2ドライバ109で第2モータ111を駆動するように制御する制御回路105とを有する。
(もっと読む)
一種のモータ及びその制御方法とマルチモータの集中制御システム
【課題】 直接にネットワークに接続して、遠隔制御、デバッグ、遠隔診断とトラブル排除を行い、簡単に識別でき、機能が完備され、使用範囲が更に広いモータを提供する。
【解決手段】 一種のモータ及びその制御方法とマルチモータの集中制御システムであって、採用されるモータには固定子、回転子とモータ制御装置が含まれ、モータ制御装置はネットワークインターフェース回路モジュールNICが連結され、TCP/IP通信プロトコルによって直接にネットワークに接続され、遠隔制御、デバッグ、遠隔診断とトラブル排除ができ、簡単に識別でき、機能が完備され、使用範囲が更に広いのである。
(もっと読む)
モータ制御回路
【課題】複数のモータドライバを内蔵するICは、外部端子が数多く必要になり、IC単価の価格が上昇する問題がある。
【解決手段】本発明は、複数のモータドライバを内蔵しても、1つシリアルポートを共有して使用することで、外部端子数を削減すると共に、少ない端子で、リアルタイムでの制御が求められるモータ制御を実現するモータ制御回路に関する。
(もっと読む)
モータ制御回路
【課題】従来、異常状態を検知して、モータを流れる電流を停止させ、モータやドライバを破壊から守ることが出来ても、異常状態となった原因を知ることが出来ないと言った問題がある。
【解決手段】本発明は、複数のモータドライバを内蔵しても、1つのシリアルポートを共有して使用することで、外部端子数を削減すると共に、この1つのシリアルポートを使って、複数のモータドライバの異常状態をリアルタイムでマスタICが知ることが出来るモータ制御回路に関する。
(もっと読む)
ステッピングモータ制御装置
【課題】CPUからのモータ駆動信号を複数個のステッピングモータへ共通に送信し、駆動モータ選択信号により選択されたステッピングモータのみを駆動することができる ステッピングモータ制御装置を提供することを目的としている。
【解決手段】複数個のステッピングモータ1と、前記それぞれのステッピングモータ1の1つに対して1つのスイッチ回路2と、駆動モータ選択機能およびモータ駆動信号生成機能を有したCPU3と、複数個のステッピングモータ1の各相巻線に共通に接続された接続部4を備え、複数のステッピングモータ1に対して駆動信号を共通にし、コストの適正化と装置の小型化をすることができるという効果のあるステッピングモータ制御装置を提供できる。
(もっと読む)
平面モータ装置およびこの平面モータ装置を用いた位置決め装置
【課題】モータ電流指令値と実際電流との偏差が大きくても、加減速時など正常なドライバ動作時には電流偏差信号過大と認識しない、安定したインタロック機能を備えた平面モータおよびこの平面モータを用いた位置決め装置を実現する。
【解決手段】移動面に形成された固定子と、前記移動面に沿って移動する可動子とを備えた平面モータ装置において、前記可動子のモータ部10,11,12と、電流指令値Imu*,Imv*,Imw*が入力され、これらの電流指令値に応じたモータ電流Imu,Imv,Imwをモータ部に供給するドライバ部20,21,22と、電流指令値とモータ部に流れるモータ電流との電流偏差信号ΔImu,ΔImv,ΔImwが所定の閾値を超えたときにモータ部の駆動を制限する検出部30,31,32とを備え、検出部は、モータ部の加速度に応じ前記閾値を変化させる。
(もっと読む)
ステッピングモータの駆動方法、そのような駆動方法を用いたステッピングモータの駆動装置、及びそのような方法により駆動されるステッピングモータを備えた冷凍サイクル
【課題】複数のステッピングモータを同時に駆動する方法により駆動されるステッピングモータを備えた冷凍サイクルを提供する。
【解決手段】本発明に係る冷凍サイクル10は、冷媒の流量を調節する2個の流量調節弁11A,11Bを駆動する2個のステッピングモータ12A,12bと、各ステッピングモータの駆動を制御する制御部13と、を備えており、各ステッピングモータが有する相の数pが同じであり、ステッピングモータの数がn、制御部13が出力する駆動信号の1パルスの長さがs、制御部13が同時に出力する駆動信号の数がmであり、n及びmは関係式m=n+1を満足し、制御部13が出力する駆動信号の周期tが関係式t=n×p×sを満足し、制御部13は、連続したm個のパルスからなる駆動信号を、ステッピングモータそれぞれに対して、各ステッピングモータが有する相に順番に出力し、且つステッピングモータそれぞれにおける隣り合う相を、1パルスだけ同時に励磁する。
(もっと読む)
モータ制御装置
【課題】 複数のステッピングモータを駆動制御するモータ制御装置において、ステッピングモータの回転動作時の最大消費電力を低減できるとともに、ステッピングモータの回転動作の指示に応じて即座に回転動作を開始させることを可能とする。
【解決手段】 記録紙収納部414、415から記録紙を給紙するそれぞれのローラを駆動するステッピングモータ601、602は選択的に回転動作させられる。ステッピングモータ601、602のいずれも回転動作させないとき、ステッピングモータ601、602に対し、ロータとステータの位相状態を保持するための保持電流を供給させ(状態(1)、(4)、(7))、ステッピングモータ601、602のいずれかを回転動作させるとき、回転動作させないステッピングモータへの保持電流の供給を停止する(状態(2)、(5))。
(もっと読む)
ファン用電源回路及び制御方法
【課題】冷却効果を損なわずに消費電力を低下させるファン用電源装置を提供する。
【解決手段】ファン4への給電をオン・オフさせるスイッチ2を備え、スイッチのオフ時間はスイッチがオンからオフへの遷移後、ファンの回転数が予め定められた所定値に落ちた時点に対応しており、冷却効果を損なわずに消費電力を低下させる。また、複数のファンを備えた場合、複数のファンの給電を制御するスイッチのオンとなる時間を互いにずらす。
(もっと読む)
モータ制御装置
【課題】モータ制御装置において、ECUや可変抵抗器を用いることなく、ブラシ付モータを好適に制御できるものが望まれていた。
【解決手段】モータ制御装置10は、第1モータ11と、第2モータ12と、ステップモータ13とを含む。第1モータ11は、直流電源1により高速で回転される。第1モータ11の回転により第2モータ12が回転され、第2モータ12は誘起電圧を発生する。この誘起電圧は、ステップモータ13により、ブラシ25の角度位置を変化させることにより制御できる。よって、ブラシ25から出力経路30を介して、制御対象のブラシ付モータ2へ与える電力が、所望の電圧値になるように調整できる。
(もっと読む)
1 - 20 / 35
[ Back to top ]