
Fターム[5H572HB01]の内容
Fターム[5H572HB01]の下位に属するFターム
供給電圧を制御するもの (35)
二次電流を制御するもの
極数変換によるもの
二次励磁制御によるもの (1)
一次周波数を制御するもの (481)
Fターム[5H572HB01]に分類される特許
1 - 7 / 7
モータを可変速駆動装置にホット接続する方法
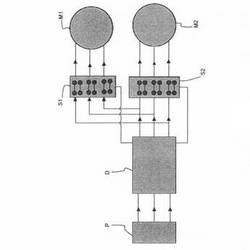
【課題】過大電流を起こさないで、追加のモータをホット接続すること。
【解決手段】第1のモータM1を可変速駆動装置Dから切断するステップと、少なくとも1つの第1のモータM1の状態推定器を、少なくとも1つの第1のモータM1の予め確立された負荷モデルに基づいて初期設定するステップであって、前記状態推定器が、少なくとも1つの第1のモータM1の推定状態の、時間にわたる進展を計算することが可能であり、推定状態が、少なくとも1つの第1のモータM1の少なくとも速度を含むステップと、追加のモータM2を可変速駆動装置Dに接続するステップと、少なくとも1つの第1のモータM1の推定状態に達する指令を用いて、追加のモータM2を始動するステップと、追加のモータの状態が、少なくとも1つの第1のモータM1の推定状態に達したときに、前記少なくとも1つの第1のモータM1を再接続するステップとを含む。
(もっと読む)
交流回転機の制御装置

【課題】複数の電力変換装置および他の付属機器の間で情報を共有して、交流回転機の駆動連係を強化することで、電力変換システム全体の最適化を容易とした交流回転機の制御装置およびその運転方法を提供する。
【解決手段】電力変換システムは、マスター局を構成する上位制御装置10、複数の電力変換装置11〜13、および付属する情報機器(温度センサ14、圧力センサ15などの各種センサ機器)などによって分散構成されている。上位制御装置10は第1の通信回線22によって電力変換装置11,12と接続されている。さらに電力変換装置11,12は、2つ以上の通信機能を搭載し、残りの電力変換装置13、および温度センサ14、圧力センサ15と、第2の通信回線23によって接続されている。
(もっと読む)
電気車駆動システム
【課題】アクティブサスペンションや軸ばねの可変特性といったハードウェアの追加や変更が不要で、車体の振動乗り心地を改善する手法が必要である。また、電動台車で容易に実現できる手法が望ましい。
【解決手段】車輪を有する台車の上に車体が搭載された電気車であり、台車に装荷された電動機が歯車を内蔵した駆動装置を介して車輪を駆動することにより走行する電気車両において、電動機のトルクにより車体の振動抑制制御を行う。また、台車振動を電動機の回転速度から演算した情報をもとに電動機のトルクにより台車振動を抑制し、間接的に車体の振動の抑制を行う。
(もっと読む)
交流電動機の監視装置
【課題】電流振幅の影響を受けにくく、検出精度の高い交流電動機の監視装置を得る。
【解決手段】交流電源2から複数のヒステリシスモータ3にそれぞれ流れる個別電流を検出する個別電流検出手段例えば個別電流検出器5と、交流電源2から交流電動機3全体に流れる全電流を検出する全電流検出手段例えば全電流検出器4と、全電流検出器4及び個別電流検出器5によって同時に検出された電流検出値のうち、全電流検出値を基準とし、個別電流検出値との電流位相差がヒステリシスモータ3によって決められる異常判定レベル(規定値)を超えた時、ヒステリシスモータ3が異常と判定する判定手段例えば監視回路7を備えたもの。
(もっと読む)
リニアアクチュエータ
【課題】 ヨーイング角度を規定値内に抑えた状態で、姿勢制御に要する駆動電流値を最小とすることができるリニアアクチュエータを実現する。
【解決手段】 夫々に位置検出手段を備えた一対のリニアモータを所定距離を隔てて平行に配置し、前記リニアモータのスライダ間をアーム部材で結合したリニアアクチュエータにおいて、
前記一対の位置検出手段の出力の和に基づき、前記スライダ間の中点位置信号を算出する中点位置検出手段と、
前記一対の位置検出手段の出力の差に基づき、前記スライダ間の姿勢位置信号を算出する姿勢位置検出手段と、
前記中点位置信号と位置指令信号との偏差に基づく推力指令により前記スライダを駆動する駆動電流値を操作する中点位置制御部と、
制御された中点位置における最適な姿勢目標値信号を生成する姿勢目標値生成部と、
前記姿勢位置信号と前記姿勢目標値信号との偏差を演算した補正信号を利用して前記推力指令を補正する姿勢制御部と、
を備える。
(もっと読む)
紡績機および紡績機の駆動方法
【課題】紡績機または紡績機システムにおいてモータのタイプに応じて理想的な電圧比でのエネルギ供給を行えるようにする。
【解決手段】少なくとも3つの直流電圧線が電源に接続されており、ここで少なくとも1つの直流電圧線は少なくとも2つの直流電圧源に共通に接続され、電流負荷は少なくとも3つの直流電圧線のうち2つの直流電圧線に選択的に接続され、これにより少なくとも選択的に、a)第1の直流電圧線と第2の直流電圧線とのあいだの電圧U1+U2、b)第1の直流電圧線と第3の直流電圧線とのあいだの電圧U1、および、c)第2の直流電圧線と第3の直流電圧線とのあいだの電圧U2が供給される。
(もっと読む)
同期制御システム
【課題】 複数のモータを同期運転する同期制御システムにおいて、位置決めの短縮と電源回生による省電力化、システム構成の小形化を図ることができる同期制御システムを提供する。
【解決手段】 加速度指令に基づいて補償トルク指令を生成する補償トルク演算部と、前記補償トルク指令とトルク指令に基づいて減速トルク指令を生成する減速トルク演算部と、前記補償トルク指令あるいは前記減速トルク指令のいずれかを選択する切替部と、を有した上位装置と、複数の駆動装置の直流電源入力に、共通に接続する電源回生用コンバータと、を備える。
(もっと読む)
1 - 7 / 7
[ Back to top ]