
Fターム[5H572KK03]の内容
Fターム[5H572KK03]の下位に属するFターム
計算機を用いるもの (134)
Fターム[5H572KK03]に分類される特許
1 - 13 / 13
遠心分離機
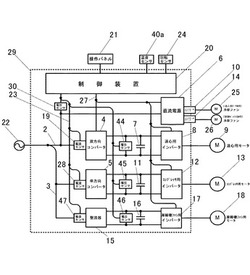
【課題】
遠心分離機において、交流電源の容量に対して複数のモータへの電力配分を設定する。
【解決手段】
双方向の昇圧コンバータ4からインバータ8を介して接続される遠心用モータ(ロータ駆動用モータ)9と、単方向の昇圧コンバータ5からインバータ12を介して接続されるロータ冷却用コンプレッサ用モータ13を交流電源22に並列に接続し、これらのコンバータ4、5の昇圧電圧を交流電圧22のピーク値以上とし、制御装置20はインバータ8、12を例えばPWM制御によりこれらのモータ9、13に適切な電圧が供給されるように制御する。この際、交流電源22の給電容量に合わせて遠心用モータ9とコンプレッサ用モータ13のロータ加速時の電力配分を設定する。この配分はあらかじめ設定して記憶しておき、これに従ってモータ9、13の回転を制御する。
(もっと読む)
同期制御システム、制御装置及び同期制御方法

【課題】複数の制御装置により構成される同期制御システムにおいて、同期運転を実現する際に、安全性を確保すると共に、システム全体として煩雑さを解消し、コストを低減する。
【解決手段】サブマスタ及びスレーブの制御装置10−2〜10−nは、マスタの制御装置10−1により送信された同期カウンタ値Vに基づいて、自らの基準カウンタ値Uを調整し、同期運転を行う。サブマスタの制御装置10−2は、同期カウンタ値Vを受信することができない場合、サブマスタからマスタにモードを切り替え、自らのカウンタ122のカウンタ値をスレーブの制御装置10−3〜10−nへ送信する。スレーブの制御装置10−3〜10−nは、新たなマスタの制御装置10−2からのカウンタ値に基づいて基準カウンタ値Uを調整し、制御装置10−2〜10−nの同期運転を維持する。
(もっと読む)
モータ制御用シリアル通信装置
【課題】通信回線に異常が発生した場合でも、モータのサーボ特性を劣化させることなく同期駆動させることが可能なモータ制御用シリアル通信装置を提供する。
【解決手段】モータ駆動装置1209〜120nは、上位側装置と互いにシリアルに接続されデータを相互に送受信してモータ1009を駆動する。通信ケーブル1201に断線が発生したとき、上位制御装置から制御指令信号が入力されなくなる最上位のモータ駆動装置1209が、上位制御装置に代わって、モータ駆動装置1209〜120nを同期させる同期信号を出力し、各モータ駆動装置により駆動されるモータ1009を同期駆動させる。このような構成では、サーボ特性を劣化させることなく、各モータを同期して停止させたりあるいは目標位置に移動させることができ、安全性に優れたモータ制御が実現される。
(もっと読む)
シャフトレス輪転印刷機における同期制御装置および同期起動方法
【課題】輪転印刷機を停止状態から速やかに起動させ、起動時に機械の振動、ギヤ鳴り、及び連続紙の破断や弛みの発生を解消して速やかに同期制御に移行させること。
【解決手段】輪転印刷機の同期制御システムにおいて、集中制御装置01にバーチャル回転指令発生装置0101を、印刷機、折り機の同期駆動装置に位相指令検出装置0601、位相FB検出装置0602、0603を設置する。また、折り機に周期的な負荷変動の影響を抑止する回転補償器を設置する。そして始めは徐動速度にて滑らかに運転し、安定となった徐動運転中に折り機の位相FB検出装置0603の出力をバーチャル回転指令発生装置0101にプリセットした後、各印刷機と折り機の位相制御をオンとする。これにより、折り機は原点合わせ動作を必要とせず同期制御へ移行し、各印刷機は原点合わせゲインGzを用いて滑らかに原点合わせを行った後同期制御へ移行する。
(もっと読む)
マスターサーボならびにブースターサーボ、マスターサーボとブースターサーボを有する多重系サーボユニット
【課題】複数のサーボより理想的な合算トルクを得ることができる多重系サーボユニットを提供する。
【解決課題】マスターサーボ10とブースターサーボ20は、接続コード30を介して電気的に接続されている。マスターサーボ10は、入力される制御信号に基づいて駆動信号を生成し、該駆動信号により駆動する。ブースターサーボ20は、マスターサーボ10で生成される駆動信号が接続コード30を介して供給されることにより駆動する。両サーボは、同一の駆動信号により駆動することとなるため、駆動量を一律にすることができ、動作のずれを生じることがない。
(もっと読む)
モータ制御用シリアル通信装置
【課題】効率的なシリアル通信を行うことが可能なモータ制御用シリアル通信装置を提供する。
【解決手段】モータ駆動装置402〜403には、上位側装置並びに下位側装置と通信する通信I/F部409、410と、アクセス制御部412と、回線設定部411が設けられる。上位制御装置401から各モータに制御指令信号を伝達する場合には、回線設定部は、両通信I/F部の回線並びに上位装置側の通信I/F部とアクセス制御部間の回線を設定して、制御指令信号を各モータ駆動装置のアクセス制御部に入力させ、各モータ駆動装置からデータを上位制御装置に伝達する場合には、上位装置側に位置する各モータ駆動装置の回線設定部は、両通信I/F部の回線を接続させて、該データを上位制御装置に伝達させる。このような構成では、配線効率が高くなり、効率的なシリアル通信が可能となる。
(もっと読む)
アクチュエータシステム及びアクチュエータ装置
【課題】複数が同時に駆動される際の振動及び作動音の増大を抑えることができるアクチュエータシステムを提供する。
【解決手段】アクチュエータシステムは、それぞれアドレスが設定される複数のアクチュエータ装置A1,A2を備える。各アクチュエータ装置A1,A2は、共通の通信線を介して入力される制御信号に基づいてそれぞれ独立して駆動される。そして、アクチュエータ装置の内の複数を同時に駆動する際は、それらの駆動速度を低速とする。例えば、アクチュエータ装置A2が高速駆動している状態で、アクチュエータ装置A1を駆動する場合、アクチュエータ装置A1は、低速駆動中信号を出力して駆動せず待機する。アクチュエータ装置A2は、アクチュエータ装置A1からの低速駆動中信号が入力されると、自身を低速駆動して低速駆動中信号を出力する。すると、アクチュエータ装置A1は、低速駆動を開始する。
(もっと読む)
電動機駆動装置およびそれを備えた車両
【課題】コンデンサのマージンを小さくすることができる電動機駆動装置を提供する。
【解決手段】ECU50は、インバータ10,20からのフェール信号FE1,FE2が非活性化されているとき、すなわち、インバータ10,20がいずれも正常のときは、モータジェネレータMG1,MG2の発電状態に拘わらず、遮断許可信号RG1,RG2を活性化してANDゲート30,40へ出力する。ANDゲート30は、フェール信号FE2と遮断許可信号RG1との論理積を演算して遮断信号DWN1をインバータ10へ出力する。ANDゲート40は、フェール信号FE1と遮断許可信号RG2との論理積を演算して遮断信号DWN2をインバータ20へ出力する。
(もっと読む)
ステアバイワイヤシステム
【課題】転舵モータ制御装置の異常時に、ステアバイワイヤシステムの過剰な電力消費や発熱を抑制し、かつ、操舵操作に対する転舵モータの追従性能を常時確保すること。
【解決手段】転舵モータ制御装置60の異常時には、転舵モータ制御装置60がモータ20、31の駆動制御系統から切り離され、機械式整流器35によってブラシレス直流モータ20が駆動制御されて各転舵輪50,50が転舵される。この機械式整流器35によって、ハンドル11に対する操舵操作に応じた位相を有する3相交流電圧を、バッテリーBT0またはバッテリーBT1から供給される適当な直流電圧から生成して、ブラシレス直流モータ20に印加することができる。この時、スイッチSW2は、ブラシレス直流モータ20への給電電力が、反力モータ31が発電し出力する電力の大きさに対して段階的に単調増加する様に、適時上記の選択を実行する。
(もっと読む)
電動機駆動システム
【課題】複数の電動機駆動装置が接続された設備機器の主電源部におけるメイン開閉器の突入電流を抑制できる電動機駆動装置を提供する。
【解決手段】各電動機駆動装置2は、アドレス番号を設定するアドレス設定手段10と、開閉器3の駆動信号を生成する駆動信号生成手段11と、開閉器駆動回路12をさらに備えており、アドレス設定手段10は、EEPROMによって異なる電動機駆動装置のアドレス番号を記憶させる。一方、駆動信号生成手段11は、パラメータによって任意の遅れ時間をEEPROMで保持するとともに、この遅れ時間をアドレス設定手段10で設定したアドレス値(番号)に掛け、アドレス値に応じた遅れ時間を確保する。この遅れ時間を有した駆動信を開閉器駆動回路12に出力するため所定時間遅れて開閉器3が閉じる。
(もっと読む)
電動機制御装置
【課題】 回転位置信号または直線位置信号等の基準位置信号に振動またはノイズが伴う場合であっても、電動機の位置決め精度を向上させることが可能な電動機制御装置を提供する。
【解決手段】 速度検出回路40は、n回目スキャンの基準位置信号とn+1回目スキャンの基準位置信号とから基準速度信号を演算し、速度フィルタ回路41は、基準速度信号の速度群の平均値を演算し、位置生成回路42は、平均速度信号から位置信号に変換してn回目スキャンの第1基準位置演算信号を演算する。そして、第2減算器46は、n回目スキャンの第1基準位置演算信号とn回目スキャンの基準位置信号との位相差を位相補償する。このようにして得たn回目スキャンの第2基準位置演算信号に基づいて、制御軸を駆動する位置指令値を生成し、位置フィードバック信号によって電動機を制御する。
(もっと読む)
リニアアクチュエータ
【課題】 一対のリニアモータのスライダ間をアーム部材で結合するリニアモータで発生する各モータ間の位置誤差を補正して高精度の位置決め制御を可能とするリニアアクチュエータを実現する。
【解決手段】 位置検出手段を備えた一対のリニアモータのステータを所定距離を隔てて平行に配置し、前記リニアモータのスライダ間をアーム部材で結合したリニアアクチュエータにおいて、
前記一対の位置検出手段の出力の和に基づき前記スライダ間の中点位置信号を算出する中点位置検出手段と、
前記一対の位置検出手段の出力の差に基づき前記スライダ間の位置誤差信号を算出する位置誤差検出手段と、
前記中点位置信号と目標位置信号との偏差に基づく推力指令によりドライバを介して前記リニアモータのスライダを駆動する中点位置制御手段と、
前記位置誤差信号を演算した補正信号を前記推力指令に差動的に重畳させる姿勢制御手段と、
を備える。
(もっと読む)
モータ駆動装置及び画像形成装置
【課題】 ブラシレスDCモータを駆動するモータ駆動装置において、相切替を安定して行うことができ、かつ、装置の小型化、コスト低減を効果的に図りうる構成を提供する。
【解決手段】 モータ駆動装置は、デジタル処理を行うASIC200と、ASIC200からのデジタル信号出力に基づいて、スキャナモータ25の駆動を行うモータドライバ250aとを備えて構成されている。ASIC200には、ホール素子信号が入力可能に構成されており、このホール素子信号に基づいて、スキャナモータ25の相切換タイミングを決定する相切換部234が設けられている。そして、相切換部234で決定した相切換タイミングに基づくデジタル信号(相切換信号)をモータドライバ250aに出力するように構成されている。
(もっと読む)
1 - 13 / 13
[ Back to top ]