
Fターム[5H572KK04]の内容
Fターム[5H572KK04]の下位に属するFターム
メモリを用いるもの (93)
Fターム[5H572KK04]に分類される特許
1 - 20 / 41
サーボドライブシステム
【課題】 サーボ制御の制御応答性を高め、制御装置の各軸の特性に応じて、制御演算部をサーボアンプ又はサーボコントローラに分配可能なサーボドライブシステムを提供する。
【解決手段】 本発明のサーボドライブシステムは、軸毎にサーボモータを制御するサーボ制御部が、サーボモータの指令を生成するプロファイル生成部と、サーボモータの位置を制御する位置制御部と、サーボモータの速度を制御する速度制御部と、サーボモータのモータ電流を制御する電流制御部と、を有し、プロファイル生成部、位置制御部、速度制御部及び電流制御部は、軸毎にサーボアンプ又はサーボコントローラにそれぞれ分配されている。
(もっと読む)
射出成形機

【課題】求められる制御精度がそれぞれ異なる複数のサーボモータをより効率的に集中制御する多軸サーボドライバを搭載する射出成形機を提供すること。
【解決手段】四つのサーボモータM1〜M4を集中制御する多軸サーボドライバEQを搭載する射出成形機において、その多軸サーボドライバEQは、それら四つのサーボモータM1〜M4のそれぞれに関する演算のために用いられる一のCPU資源を備える。また、その多軸サーボドライバEQは、それら四つのサーボモータM1〜M4の制御周期を個別に設定する制御周期設定部C13を備え、成形サイクル中にそれら四つのサーボモータM1〜M4のうちの少なくとも一つの制御周期が変化するように、それら四つのサーボモータのそれぞれの制御周期を設定することができる。
(もっと読む)
電動動作装置及びそれを用いた作業機械
【課題】シンプルで部品点数も少ない構成で自動的にバランスを修正できる信頼性の高い電動動作装置及びそれを用いた作業機械を提供することにある。
【解決手段】第一の電動アクチュエータ1は、ロータ位置センサSを有する電気モータM1を備え、第二の電動アクチュエータ2は、ロータ位置センサを有さない電気モータM2を備える。第一の電動アクチュエータ1と第二の電動アクチュエータ2の出力は、不等長リンク3により合成される。電気モータM1は、その運転条件で最大のトルクを発生するロータと磁界の位置関係にあり、電気モータM2は、その運転条件で最大のトルクを発生するロータと磁界の位置関係から外れて最大のトルクから減少したトルクを発生するような運転状態となる。
(もっと読む)
N個のロボットを同時に制御するロボット制御装置
【課題】ロボットを容易に追加および削除できると共に低コストで小型にする。
【解決手段】N個(N≧2)のロボット(R1〜Rn)を同時に制御するロボット制御装置は、メイン制御ユニット(MCU)を具備し、メイン制御ユニットは、N個のロボットのそれぞれの動作指令を作成するメインプロセッサ(MP)と、メインプロセッサにより作成された動作指令に基づいてロボットのそれぞれを駆動するサーボモータの動作量を算出するサーボプロセッサ(SP)と、を含んでおり、さらに、メイン制御ユニットに接続された、N個のアンプユニット(AU1〜AUn)を具備し、サーボプロセッサにより算出されたサーボモータの動作量に基づいてN個のロボットのうちの1個のロボットのサーボモータを駆動するサーボアンプ(SA1〜SAn)、を含む。
(もっと読む)
画像形成装置
【課題】回転多面鏡における回転速度の微調整幅の高分解能化と、回路の規模の簡略化とを両立させる。
【解決手段】回転状態検知手段は、回転多面鏡の回転状態を検知し、回転状態を示す回転状態信号を出力する。第1クロック生成手段は、第1クロックを生成する。回転基準信号生成手段は、第1クロックにしたがって順序回路動作を行い、回転多面鏡の回転基準となる回転基準信号を生成する。第2クロック生成手段は、回転基準信号の周期よりも短く、かつ、第1クロックの周期よりも長い周期の第2クロックを生成する。受信手段は、第2クロックにしたがって順序回路動作を行い、回転基準信号を受信する。位相差測定手段は、第2クロックにしたがって回転状態信号と回転基準信号との位相差を測定する。制御手段は、位相差に基づいて駆動手段に加速信号または減速信号を供給する。
(もっと読む)
洗濯機のモータ駆動装置
【課題】モータを高速回転させる場合に必要となる昇圧電圧をより確実に発生できる洗濯機のモータ駆動装置を提供する。
【解決手段】制御回路42Bは、脱水運転を行う場合の制御パラメータであるドラムモータ5の回転数の変化に応じて、IGBT48により交流電源の電圧波形のゼロクロスタイミング間に全波整流回路45の入力端子間を短絡させる回数を変化させ、リアクトル44に蓄積された電磁エネルギーを有効に利用して、全波整流回路45より出力される直流電源電圧をより高く昇圧する。
(もっと読む)
アクチュエータ駆動装置
【課題】アクチュエータ駆動装置に対し、1サーボ演算ルーチンの処理時間を短縮させてサーボ動作帯域を向上させ、より複雑で高度な演算処理を行った場合でもサーボ動作帯域を確保する。
【解決手段】半導体の検査装置又は製造装置の試料移動台をサーボ制御するためのアクチュエータを駆動させるアクチュエータ駆動装置において、前記アクチュエータの1駆動軸又は複数駆動軸に対して、複数の演算機を用いてソフトウェア・サーボにより駆動させる構成を有することを特徴とする。また、前記ソフトウェア・サーボを複数にブロック化して、各々のブロックをソフトウェア・サーボの演算スケジュールに則り前記複数の演算機にて分散処理させる。
(もっと読む)
負荷駆動システム
【課題】主電力変換器及び補助電力変換器に使用されるスイッチング素子の耐圧を等しくして素子の選定を容易にし、コストを低減する。
【解決手段】補助モータM1,M2を駆動する補助電力変換器Conv1,Conv2のうち少なくとも一部は電源電圧を昇圧してその直流中間回路に供給する昇圧機能を備え、前記直流中間回路を含む任意の正,負極間の直流中間回路に主電力変換器INVを接続して主モータMを駆動するシステムにおいて、主電力変換器INVの直流中間回路の両端を、補助電力変換器Conv1,Conv2の直流中間回路の直列回路の両端に接続し、主電力変換器INVの各相において直列接続された半導体スイッチング素子の個数を、補助電力変換器Conv1,Conv2の直流中間回路の直列回路の各相において直列接続されたスイッチング素子の個数と等しくする。
(もっと読む)
一種のモータ及びその制御方法とマルチモータの集中制御システム
【課題】 直接にネットワークに接続して、遠隔制御、デバッグ、遠隔診断とトラブル排除を行い、簡単に識別でき、機能が完備され、使用範囲が更に広いモータを提供する。
【解決手段】 一種のモータ及びその制御方法とマルチモータの集中制御システムであって、採用されるモータには固定子、回転子とモータ制御装置が含まれ、モータ制御装置はネットワークインターフェース回路モジュールNICが連結され、TCP/IP通信プロトコルによって直接にネットワークに接続され、遠隔制御、デバッグ、遠隔診断とトラブル排除ができ、簡単に識別でき、機能が完備され、使用範囲が更に広いのである。
(もっと読む)
回転電機制御装置
【課題】回転電機制御装置において、回転電機に接続されるインバータの欠相判断をさらに容易にすることである。
【解決手段】回転電機制御装置40は、欠相故障を検出するために予め定められた内容の評価電流値を取得し、これを評価電流閾値と比較し、取得された評価電流値が評価電流閾値を超えないが正常値よりも大きいときに欠相可能性があると判断する1次判断処理部42と、欠相可能性があると判断されたときに、回転電機を流れる電流値を増加させる電流増加処理部44と、電流増加状態の下での評価電流値を取得し、取得された評価電流値と評価電流閾値とを比較し、評価電流値が評価電流閾値を超えるときに、欠相故障であると判断する欠相判断処理部46とを備えて構成される。
(もっと読む)
モータ制御回路
【課題】複数のモータドライバを内蔵するICは、外部端子が数多く必要になると同時、複数個の固有のアドレスが必要となり、固有のアドレスを複数個、準備するのは手間がかかる。更にドライバの数が増えると、アドレスが不足しドライバが制御できない問題が発生する。
【解決手段】本発明は、複数のモータドライバを内蔵しても、1つシリアルポートを共有して使用することで、外部端子数を削減すると共に、1つの固有のアドレスを用いて、複数個のモータを制御することが出来るモータ制御回路に関する。
(もっと読む)
消費電力量および回生電力量を計算するサーボモータ駆動制御装置
【課題】複数のアンプ群を有する電源構成の機械システムにおいて、消費電力量や回生電力量の適切な評価を可能とする。
【解決手段】上位の電源に接続された共通電源部と、それからサーボモータに電力を供給する複数の電力供給部と、からそれぞれ構成されている複数のアンプ群を有する機械システムのサーボモータ駆動制御装置は、アンプ群毎の電力量を求めるアンプ群電力検出部を有する。各アンプ群電力検出部は、それに該当するアンプ群に属する電力供給部に接続されたサーボモータについての個別周期電力量dEakを合計して、当該アンプ群での消費電力量または回生電力量であるアンプ群周期電力量dEbgを求め、それを所定の期間にわたって積算してアンプ群消費電力量Ebngを求める。個別周期電力量dEakは、サーボモータが電力を消費している場合に正の値であり、サーボモータが電力を回生している場合に負の値である。
(もっと読む)
クレーンシステム
【課題】複数のクレーンを効率的に運転するクレーンシステムを提供する。
【解決手段】システムコントローラ5は、受電部4と複数のクレーンの電力を受信する送受信部と、受電部電力が最大電力を超えないように荷役コマンドに対応したクレーン最大電力を生成するクレーン最大電力生成部を備え、クレーンは操作信号と荷役コマンドと最大電力に基づいて巻上部・走行部・横行部・起伏部の速度プロファイルを生成しこれより位置指令を生成して各部のインバータに位置指令を送信しインバータから状態情報を受信するクレーンコントローラと、商用電源から第1直流電源を生成するコンバータと、第1直流電源から前記位置指令に基づいて交流電源を生成し巻上部・走行部・横行部・起伏部のモータを駆動する複数のインバータと、第1直流電源と第2直流電源の間にあり双方向に電力を変換するチョッパと、第2直流電源に接続した蓄電部と、を備えた。
(もっと読む)
多軸モータ制御システム
【課題】CPUの演算能力が高くない場合にも、多軸での高速、高加速でのモータ駆動を可能として、高い制御性能と低コストを両立させる。
【解決手段】1台のCPU42で複数のモータ10の制御演算を行なう多軸モータ制御システムにおいて、速度の立ち下がり以外の区間と立ち下がり区間を識別する速度区間識別手段(速度区間検出部42F、位置指令演算部50)と、電流指令補償分を設定する補償量設定手段(補償量演算部42G、補償量記憶部42J)と、速度の立ち下がり以外の区間では電流指令に電流指令補償分を加算し、速度の立ち下がり区間では電流指令に電流指令補償分を加算しない電流指令補償手段(スイッチ部42H、可変ゲインアンプ42K)と、を備える。
(もっと読む)
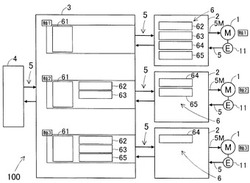
モータ制御システムおよびその接続判定方法
【課題】2台のサーボアンプを通信ケーブルで接続するだけでマスター、スレーブの設定ができ、簡便に同期制御がおこなえるモータ制御システムを提供する。
【解決手段】サーボアンプ1(2)は、双方向通信手段15(26)の一方に駆動するサーボモータ3(4)のエンコーダ通信ケーブル5(6)が接続され、他方の双方向通信手段16と双方向通信手段25を通信ケーブ7で接続しており、装置コントロール部11(21)は、通信開始時に出力するセレクタ切替信号11d(21d)によって双方向通信手段15(25)と装置間通信部13(23)またはエンコーダ通信部12(22)をセレクタ4(24)で選択的に接続し、同期制御におけるマスター、スレーブを自動判定する。
(もっと読む)
電動機の制御回路および電動機の制御回路を備えた移動体
【課題】比較的簡単な構成で、複数の電動機の回転速度を制御することのできる技術を提供する。
【解決手段】
複数の電動機を備えた移動体の制御回路100は、複数の電動機をそれぞれ駆動させる駆動信号をそれぞれ生成する複数の駆動信号生成部120L,120Rと、複数の電動機のうちの1つの電動機の回転速度を検出し、回転速度に応じた周波数を示す回転信号を生成する回転信号生成部32Lと、複数の電動機のうちの1つの電動機に関する目標回転速度を設定し、設定された目標回転速度に応じた周波数を示す基準回転信号を生成する基準回転信号生成部104と、回転信号と基準回転信号との位相差を検出し、位相差を示す位相差信号を生成する位相差信号生成部108と、を備える。複数の駆動信号生成部120L,120Rは、位相差信号に基づいて、駆動信号をそれぞれ生成する。
(もっと読む)
多軸ロボット用電源回路およびその電源回路の遮断方法
【課題】簡潔な配線で安価で信号伝達の遅れを考慮する必要がなく、信号線の断線ですべてのモータ電源をオフにする多軸ロボット用電源回路を提供する。
【解決手段】 モータ電源遮断回路を駆動する安全ユニット10において、第1入力回路11に入力信号があるとき正常とする出力信号をCPU12と論理回路13に入力し、CPU12は入力信号が入ると出力信号を論理回路13とモータ電源遮断回路19に入力し、論理回路13は2入力で1出力を第1出力回路14に入力し、第2入力回路16に入力信号があるとき正常とする出力信号をCPU12と第2出力回路17に入力し、第1入力回路11または第2入力回路16に入力が断たれると出力を出さなくなることにより、CPU12がモータ電源遮断回路19を遮断動作させる。
(もっと読む)
モータ駆動用通信システム
【課題】通常動作時の性能を落とすことなく、通信異常時においても安全に停止させ、異常状態を的確に分析できるモータ駆動用通信システムを低コストで提供する。
【解決手段】上位装置11と複数のモータ駆動装置12は、高速シリアル通信手段15と2チャンネルの低速シリアル通信手段16およびCPU14を有し、上位装置11とモータ駆動装置12の同じシリアル通信手段(高速シリアル通信手段15,低速シリアル通信手段16)をそれぞれ接続する通信ケーブル13を備え、上位装置11のCPU14は、高速シリアル通信手段15を介して通信データを一方向に送信し、一定期間内に通信データを受信できないとき、高速シリアル通信手段15による通信を停止させ、低速シリアル通信手段16aに切替え、モータ駆動装置12と双方向シリアル通信をする。その後、低速シリアル通信手段16bに切替え、逆周りにモータ駆動装置12と双方向シリアル通信する。
(もっと読む)
通信システム
【課題】スレーブ制御手段およびこれが制御するアクチュエータの大型化を抑制しつつ、スレーブ制御手段およびアクチュエータを共通化することが可能な通信システムを提供すること。
【解決手段】各アクチュエータ制御ユニットは、マスタECUから多重通信のためのアドレスの設定を指示された場合には(510)、ドアサーボを作動して接続した各ドアを駆動し(520、530)、ドアサーボ出力軸の回転作動方向両端側の作動限界位置から回転量を検出し(540)、検出した回転量をマスタECU内に予め設定された回転量とアドレスとの対応関係に照合し(550)、各ドアサーボに接続したそれぞれのドアに対応したアドレスを特定して設定する(560)。
(もっと読む)
グラビア印刷機およびその制御方法
【課題】各印刷ユニットによる印刷の見当ずれを早期に定常状態に収束させることができるグラビア印刷機およびその制御方法を提供する。
【解決手段】グラビア印刷機は、最初にウェブWに印刷を施す前段印刷ユニット10aと、前段印刷ユニット10aの下流側に設けられた後段印刷ユニット10b、10c、10dとを備えている。各後段印刷ユニット10b、10c、10dは、ウェブW上の見当マークを検出する見当マーク検出センサ15b、15c、15dと、印刷ユニット間の張力を検出する張力検出器18b、18c、18dとを各々有している。また、グラビア印刷機は制御装置30を有している。制御装置30は、見当ずれの大きさならびにウェブWの張力の所定時刻間の偏差に基づいて、モータ13b、13c、13dの制御量修正値を経時的に算出するようになっている。
(もっと読む)
1 - 20 / 41
[ Back to top ]