
Fターム[5H572LL30]の内容
Fターム[5H572LL30]に分類される特許
1 - 17 / 17
回転電機制御システム
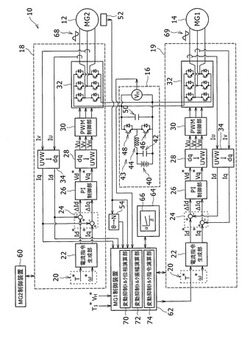
【課題】回転電機制御システムにおいて、複数の回転電機の少なくとも1つにトルク変動が生じたときに、蓄電装置の入出力電力の変動を抑制することである。
【解決手段】回転電機制御システム10は、駆動用回転電機(MG2)12、発電用回転電機(MG1)14、MG2とMG1に共通の電源部16、MG2用の制御ブロック18、MG1用の制御ブロック19、MG2制御装置60、MG1制御装置62を含んで構成される。MG1制御装置62は、MG2のトルク変動を抑制するための変動抑制トルクのトルク位相を演算する変動抑制トルク位相演算部70と、変動抑制トルクのトルク振幅を演算する変動抑制トルク振幅演算部72と、演算された変動抑制トルクをMG1のトルク指令値に重畳し、これを変動抑制トルク指令値として演算する変動抑制トルク指令演算部74を含んで構成される。
(もっと読む)
モータ制御装置および産業用ロボット

【課題】複数のモータの動作を制御するモータ制御装置において、複数のモータ各々に対して各々PWM制御を行う複数のインバータ部に供給する三角波キャリアの位相が同一であると、各インバータ部のスイッチング素子の動作が同期して大きなリプル電流が直流電源部を構成するコンデンサに流れ、コンデンサに悪影響を及ぼす。
【解決手段】複数のモータの動作を制御するモータ制御装置において、複数のモータ各々に対して各々PWM制御を行う複数のインバータ部と、前記複数のインバータ部に供給する動力を平滑する容量性素子を備え、各インバータ部はPWM制御の基本波形となる各三角波に基づいてPWM制御を行い、各インバータ部の各三角波の位相を全て異なるようにする。
(もっと読む)
交流電動機の監視装置
【課題】電流振幅の影響を受け難く、検出精度の高い交流電動機の監視装置を得る。
【解決手段】共通の交流電源1に並列接続された複数の交流電動機3の異常を監視する監視装置であって、電圧検出手段6と、個別電流検出手段5と、全電流検出手段4と、電圧検出手段6、個別電流検出手段5及び全電流検出手段4の出力から各々の個別の電力及び全体の電力を演算する電力演算手段74と、電圧検出手段4、個別電流検出手段5及び全電流検出手段4の出力からそれぞれの実効値を演算する実効値演算手段75と、電力演算手段74と実効値演算手段75の出力から、全電流と前記個別電流の各々の位相差を演算する位相差演算手段77とで構成する。各々の位相差が交流電動機3によって定められた異常判定レベルを超えたとき、交流電動機3が異常であると判定する。
(もっと読む)
電動機駆動システム
【課題】複数台の交流電動機を1台の駆動装置(電力変換器)により駆動可能とし、かつ、巻線の巻き方が同じ固定子を使用可能としてシステム全体のコスト上昇を抑えると共に、横流の発生を抑制して銅損を低減させた電動機駆動システムを提供する。
【解決手段】n(nは2以上の整数)台の交流電動機を1台のインバータ400により駆動する電動機駆動システムにおいて、例えば、インバータ400の出力可能な電圧の1/2以下の端子電圧を印加可能な2台の交流電動機101,201をタンデム結合し、かつ、これらの交流電動機101,201の巻線を相ごとに直列に接続すると共に、誘起電圧の位相を一致させる。
(もっと読む)
画像形成装置
【課題】回転多面鏡における回転速度の微調整幅の高分解能化と、回路の規模の簡略化とを両立させる。
【解決手段】回転状態検知手段は、回転多面鏡の回転状態を検知し、回転状態を示す回転状態信号を出力する。第1クロック生成手段は、第1クロックを生成する。回転基準信号生成手段は、第1クロックにしたがって順序回路動作を行い、回転多面鏡の回転基準となる回転基準信号を生成する。第2クロック生成手段は、回転基準信号の周期よりも短く、かつ、第1クロックの周期よりも長い周期の第2クロックを生成する。受信手段は、第2クロックにしたがって順序回路動作を行い、回転基準信号を受信する。位相差測定手段は、第2クロックにしたがって回転状態信号と回転基準信号との位相差を測定する。制御手段は、位相差に基づいて駆動手段に加速信号または減速信号を供給する。
(もっと読む)
負荷駆動装置
【課題】2つのインバータ駆動の負荷を近接して設ける場合に、キャリア音を低減又は抑制する技術を提供する。
【解決手段】出力が略等しい第1及び第2インバータ10,20と、2つのインバータそれぞれが駆動し、互いに近接して設けられる第1及び第2三相負荷12,22とを備え、第1インバータのキャリア信号の周波数たる第1キャリア周波数C1と、第2インバータのキャリア信号の周波数たる第2キャリア周波数C2とは互いに略等しく、第1インバータのデューティ値と、第2インバータのデューティ値とは互いに略等しく、第1インバータと第2インバータとは同じスイッチングパターンで動作し、第1キャリア周波数と第2キャリア周波数との位相差が117.5度〜242.5度の範囲にある。
(もっと読む)
電気掃除機
【課題】複数の電動送風機を備え、いずれか1つ以上の電動送風機が電流遮断部の動作によって運転不可能状態になっても、他の健全な電動送風機の運転を継続可能な電気掃除機を提案する。
【解決手段】電気掃除機1は、掃除機本体2に収容された複数の電動送風機9a、9bと、ぞれぞれの電動送風機9a、9bに直列に接続され、ぞれぞれの電動送風機9a、9bに流される電流を遮断する複数の電流遮断部24a、24bと、電動送風機9a、9bに流される電流を検出する電流検出部23と、電流遮断部24a、24bによって電流が遮断されたことを、電流検出部23で検出された電流値に基づいて判断するとともに、いずれか1つの電動送風機9a、9bに流される電流が遮断されると、他の電動送風機9a、9bの運転を開始させる制御部22と、を備える。
(もっと読む)
鉄道車両駆動制御システム
【課題】2台の2レベルPWMコンバータの直流電圧間にアンバランスが発生しないように制御して、永久磁石電動機を低速回生運転モードでも中断することなく運転継続できる鉄道車両駆動制御システムを提供する。
【解決手段】本発明の鉄道車両駆動制御システムは、コンバータ制御部30が変圧器41の低電圧側巻線43に交流電源と位相が90度ずれた無効電流が流れるように2台の2レベルPWMコンバータ31,32を動作させた上で、2台の2レベルPWMコンバータの直流側電圧の差と変圧器の低電圧側巻線の電流瞬時値とに応じて2台のPWMコンバータの交流出力電圧指令を補正し、補正後の交流出力電圧指令にて2台の2レベルPWMコンバータの各々を動作制御することで、2台の2レベルPWMコンバータの直流電圧間にアンバランスが発生しないようにした。
(もっと読む)
電動機の制御回路および電動機の制御回路を備えた移動体
【課題】比較的簡単な構成で、複数の電動機の回転速度を制御することのできる技術を提供する。
【解決手段】
複数の電動機を備えた移動体の制御回路100は、複数の電動機をそれぞれ駆動させる駆動信号をそれぞれ生成する複数の駆動信号生成部120L,120Rと、複数の電動機のうちの1つの電動機の回転速度を検出し、回転速度に応じた周波数を示す回転信号を生成する回転信号生成部32Lと、複数の電動機のうちの1つの電動機に関する目標回転速度を設定し、設定された目標回転速度に応じた周波数を示す基準回転信号を生成する基準回転信号生成部104と、回転信号と基準回転信号との位相差を検出し、位相差を示す位相差信号を生成する位相差信号生成部108と、を備える。複数の駆動信号生成部120L,120Rは、位相差信号に基づいて、駆動信号をそれぞれ生成する。
(もっと読む)
同期制御方法および同期制御システム
【課題】 シャフトレス輪転印刷機の同期制御システムにおいて、紙詰まりや破断すること無く原点合わせを終了して、速やかに印刷運転を開始できるようにすること。
【解決手段】折り機の同期駆動装置06fは、位相制御に移行する直前の瞬時位相偏差を折り機初期位相偏差として初期位相偏差メモリ0622に記憶し、折り機初期位相偏差を、複数の印刷機の同期駆動装置06fへ送出するとともに、位相制御に移行して累積位相偏差に基づき位相制御を行なう。これにより、折り機は原点合わせを経ること無く同期制御へ移行する。印刷機の同期駆動装置06fは、印刷機位相指令補正器0613により位相指令、前記折り機初期位相偏差、オフセット調整量から印刷機補正位相指令を演算し、前記印刷機補正位相指令と印刷機位相フィードバックから累積位相偏差を演算し、累積位相偏差による位相制御を行って速やかに同期制御に移行し、印刷運転を開始する。
(もっと読む)
永久磁石モータの制御装置
【課題】永久磁石モータのトルクリップルを抑制する際に事前のトルクリップルの計測を必要とせず、また出力軸に発生するトルクリップルの周波数が高い場合でも、トルクリップルを低減させ、安定したトルク出力を可能とする。
【解決手段】同一シャフト上に偶数個の特性が同一な永久磁石モータのロータを連結する際に、それぞれの永久磁石モータが発生するトルクリップルを互いに打ち消す位相差となるように、ロータの取り付け角度をずらして取り付け、それぞれの永久磁石モータを個別にトルク制御する制御アンプを設置し、トルク指令をそれぞれの制御アンプに均等に分配する。
(もっと読む)
ランプ製造装置
【課題】ランプ製造に際して各種工程における各加工装置が精度よく同期動作できるようにするとともに、コストの増大を抑制することができるランプ製造装置を提供する。
【解決手段】ランプ製造装置100は、封止装置41等の加工装置、マスター31、伝送路33を備える。マスター31は、基準位相角度生成手段51、パルス信号生成手段52を備え、基準位相角度を生成し、基準位相角度に対応するパルス信号をスレーブ32に出力する。パルス信号は、予め定められた特定パルス列に当てはめて出力される。スレーブ32は、基準位相角度復元手段53、加減速信号出力手段54、インバータ55を備え、基準位相角度復元手段53は、入力されたパルス信号からなる参照パルス列から基準位相角度を復元する。復元された基準位相角度とモータ56の機械軸の位相角度等とに基づいて、インバータ55に加減速信号を出力し、モータ56の機械軸を制御する。
(もっと読む)
印刷機および印刷機の制御方法
【課題】 複数のモータ間における同期崩れを防止するとともに、試し刷りを行うことなく同期の確認をすることができる印刷機および印刷機の制御方法を提供する。
【解決手段】 印刷ユニット3内のモータ17と、複数のモータ17をそれぞれ制御する複数のモータ制御部27と、複数のモータ17の回転位相をそれぞれ検出する複数の位相検出部19と、複数のモータ17のそれぞれに対する回転位相を制御する指令値を、複数のモータ制御部27に出力する同期制御部31と、が設けられ、同期制御部31は、複数のモータ17が同期して駆動されている際における複数の位相検出部19の出力値の差を基準位相差として記憶し、所定のタイミングで、複数の位相検出部27から取得した複数の出力値から位相差を算出し、算出された位相差と基準位相差とを比較することを特徴とする。
(もっと読む)
動力回収システム
【課題】系統保護機能等を備えることなく、エネルギー源のエネルギーを用いて生成された電力を有効に利用できるようにする。
【解決手段】系統電源に系統連系される主電源系統と、
前記主電源系統に接続された電動機と、
前記主電源系統とは独立して構成され、エネルギー源のエネルギーを利用して生成された電力を供給してこの電力に応じた前記電動機への駆動力付与が可能な補助電源系統と、
前記電動機による逆潮が生じないように、前記補助電源系統による電力供給を制御する制御器と、を備えている
(もっと読む)
洗濯機あるいは洗濯乾燥機のモータ駆動装置
【課題】モータを高速回転時にセンサレス正弦波駆動することにより低騒音化する。
【解決手段】直流電源2の直流電力をインバータ回路3により交流電力に変換し、回転ドラム5あるいは撹拌翼6を駆動するモータ7と、モータ7のロータ磁極位置を検知する位置検知手段70とモータ電流を検知する電流検知手段71と制御手段9により構成し、低速では位置検知手段70の出力信号により回転制御し、高速では電流検知手段71の出力信号により回転制御する。
(もっと読む)
同期制御システム
【課題】 マスタ、スレーブ各ユニットで夫々制御されるモータ同士の同期制御の精度の維持。
【解決手段】 マスタユニットのネット回線デバイスから同期用パケットがスレーブユニット#1、#2に転送される。これをスレーブユニット#1のネット回線デバイスで受信し、メモリデバイスに書き込む。サイクル監視&位相差保持手段は、そのライトサイクルを検出し、タイミング信号との位相差を検出し、保持し、プロセッサで読み出し、位相差分に応じてスレーブユニット#1で制御されるモータの指示量を補正する。スレーブユニット#2では、同様の監視に基づき検出される位相差をディジタルフィルタを通してタイミング信号発生周期調整手段に伝達し、タイミング信号の発生タイミングを調整する。
(もっと読む)
モータのトルクアシスト運転装置
【課題】スレーブモータの位置検出器を不要とすることで、信頼性を向上するとともにコストを低減する。
【解決手段】マスタモータのロータを所定位置で固定し、その時に機械的に固定したスレーブモータのロータの位置をスレーブモータのステータに設けた目盛りで読みとり、スレーブモータのロータの位置θrから電流位相θiを計算し、マスタ側の電流指令位相との差をスレーブモータ駆動用アンプに予め、記憶する手段を備え、マスタモータ駆動用アンプはスレーブモータ駆動用アンプへマスタモータと同じ位置指令を出力し、スレーブモータ駆動用アンプはマスタモータ駆動用アンプから受け取ったトルクと電流位相指令に位相θiを加算する手段を備えたものである。
(もっと読む)
1 - 17 / 17
[ Back to top ]