
Fターム[5H572LL49]の内容
Fターム[5H572LL49]に分類される特許
1 - 19 / 19
モータ制御システム
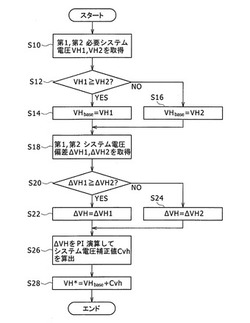
【課題】1つのコンバータの出力電圧で複数のモータを駆動するモータ制御システムにおいて、各モータに対応して行われるフィードバック制御同士の干渉を防止してシステム電圧の可変制御を安定して滑らかに行えるようにする。
【解決手段】モータ制御システムは、コンバータと、2つのインバータと、2つの交流モータと、制御部とを備える。制御部は、少なくとも一方のモータついて、モータ電流のd軸q軸平面上における電流ベクトルの電流位相が最適電流進角またはその近傍で矩形波制御されるようにシステム電圧を電流位相のフィードバック制御により可変するにあたり、電流ベクトルからそれぞれ求めたシステム電圧偏差が大きい方のモータをフィードバック制御の対象として選択する(S20〜S28)。
(もっと読む)
回転電機制御システム

【課題】回転電機制御システムにおいて、複数の回転電機の少なくとも1つにトルク変動が生じたときに、蓄電装置の入出力電力の変動を抑制することである。
【解決手段】回転電機制御システム10は、駆動用回転電機(MG2)12、発電用回転電機(MG1)14、MG2とMG1に共通の電源部16、MG2用の制御ブロック18、MG1用の制御ブロック19、MG2制御装置60、MG1制御装置62を含んで構成される。MG1制御装置62は、MG2のトルク変動を抑制するための変動抑制トルクのトルク位相を演算する変動抑制トルク位相演算部70と、変動抑制トルクのトルク振幅を演算する変動抑制トルク振幅演算部72と、演算された変動抑制トルクをMG1のトルク指令値に重畳し、これを変動抑制トルク指令値として演算する変動抑制トルク指令演算部74を含んで構成される。
(もっと読む)
回転電機制御装置
【課題】複数の交流回転電機のパルス幅変調のキャリアの波形を個別に変動させると共に、各キャリアと電流フィードバック制御の実行タイミングとを同期させ、且つ、所定の制御周期内で全ての交流回転電機の電流フィードバック制御を完了させる。
【解決手段】N個の交流回転電機の電流フィードバック制御は、重複することなく順次実行されて所定の制御周期TC内で完了される。各交流回転電機に対応するN個のキャリアCW1,CW2が、各基準区間TR1,TR2の長さを変動幅FRの範囲内でランダムに変動させて生成される。各キャリアCW1,CW2には、それぞれがN個の基準区間TR1,TR2を含むと共に、互いに開始タイミングが一致することがないように管理区間TM1,TM2が設定される。各キャリアCW1,CW2は、管理区間TM1,TM2のそれぞれの長さが制御周期TCに一致するように生成される。
(もっと読む)
回転電機制御装置
【課題】弱め界磁制御の限界点を超えた後も含め、幅広い駆動条件に対して、高い運転効率で回転電機を駆動制御する。
【解決手段】ロータと同速で回転する回転座標系に対応した電流指令を電流指令マップに基づいて決定する電流指令決定部は、電圧不足割合VRがゼロ以下の場合には、目標トルクに応じた等トルク線CTと基本制御線MTとの交点に電流指令を決定し、電圧不足割合VRがゼロ以上の場合には、目標トルクに応じた等トルク線CTに沿って電圧不足割合VRの増加に伴い限界トルク線LTへ向かう点に電流指令を決定し、電圧不足割合VRの増加により目標トルクに応じた等トルク線CTに沿った電流指令が限界トルク線LTに達した場合には、限界トルク線LTに沿って電圧不足割合VRの増加に伴い電圧制限楕円LVの中心へ向かう点に電流指令を決定する。
(もっと読む)
電力変換装置
【課題】コンデンサのリップル電流を低減しつつ、スイッチング素子間の熱損失の偏りを低減する電力変換装置を提供する。
【解決手段】電力変換装置1は、第1インバータ部20および第2インバータ部30と、コンデンサ50と、マイコン51と、を備える。マイコン51は、第1デューティ中心値Dc1が出力中心値Rcよりも下側にシフトされ、第2デューティ中心値Dc2が出力中心値Rcよりも上側にシフトされる第1状態と、第1デューティ中心値Dc1が出力中心値Rcよりも上側にシフトされ、第2デューティ中心値Dc2が出力中心値Rcよりも下側にシフトされる第2状態と、をステアリングホイール91の操舵状態に応じて切り替える。これにより、コンデンサ50のリップル電流を低減しつつ、MOS21〜26、31〜36間の熱損失の偏りを低減することができる。
(もっと読む)
制御装置
【課題】複数の制御対象を制御するための処理の増加に対して柔軟に対応可能な制御装置を提供すること。
【解決手段】 複数の制御対象を制御する制御装置は、複数の制御対象の入出力電力に応じて、複数の制御対象を制御するための各処理の優先度を決定する優先度決定部と、単位時間中に行われると推定される複数の制御対象の各処理に要する合計時間の総和に応じて、複数の制御対象の少なくともいずれか1つの処理を省略するか否かを決定する処理省略決定部と、処理省略決定部によって処理を省略すると決定された場合、優先度決定部が決定した優先度に基づいて、複数の制御対象の内、どの制御対象の処理を省略するかを決定する省略処理決定部とを備える。
(もっと読む)
電動機駆動装置、および、これを用いた電動パワーステアリング装置
【課題】過電流を流すことなく、故障を検出できる電動機駆動装置およびこれを用いた電動パワーステアリング装置を提供する。
【解決手段】電動機駆動装置1の制御部50は、通常のPWM制御を開始する前に、端子電圧とPIG1電圧に基づいて、MOS21〜26自体のショート故障を検出する。MOS21〜26自体のショート故障が検出されなかった場合、MOS21〜26の少なくとも1つをオン制御した後、全てのMOS21〜26をオフ制御したときの端子電圧とPIG1電圧とに基づいて、MOS21〜26を非導通状態にできないプリドライバ52のショート故障を検出する。これにより、上MOS21〜23から対をなす下MOS24〜26に向かって電流が流れる経路が形成されないため、過電流を流すことなくプリドライバ52のショート故障を検出することができ、インバータの焼損を防止することができる。
(もっと読む)
電動機駆動装置の制御装置
【課題】電圧制御部による内部処理に関する演算周期が最適化され、交流電動機を制御する際の処理負荷の低減が図られた制御装置を提供する。
【解決手段】直流電圧を交流電圧に変換して交流電動機に供給する直流交流変換部を備えた電動機駆動装置を、ベクトル制御法により制御する制御装置。交流電動機を駆動するための電圧指令値から直流交流変換部を制御するための制御信号を生成する電圧制御部として、電圧指令値と直流交流変換部に供給される実際の直流電圧とに基づいて、変調率と電圧指令位相とを導出する第一電圧制御部と、変調率と電圧指令位相と磁極位置とに基づいて、制御信号を生成する第二電圧制御部と、を備え、第一電圧制御部の演算周期(第二演算周期T2)が、第二電圧制御部の演算周期(第一演算周期T1)よりも長く設定されている。
(もっと読む)
回転電機制御装置
【課題】複数の回転電機を回転電機の総数よりも少ない演算処理ユニットを用いて良好に制御することが可能な回転電機制御装置を提供する。
【解決手段】各回転電機を駆動する電圧の指令である3相電圧指令をそれぞれ演算する電圧制御機能F3と、電圧制御機能F3において用いられる各電圧指令をそれぞれ演算する電流制御機能F2と、所定の周期に設定された基準演算周期ごとに、各回転電機を駆動する電圧制御機能F3の実行をそれぞれ完了させ、基準演算周期の複数回に1回、各回転電機のうち1つの電流制御機能F2の実行を完了させると共に、各回転電機のうち1つの電流制御機能F2を実行していない基準演算周期に、他の回転電機の電流制御機能F2の実行を完了させるタスク管理機能F1とを備える。
(もっと読む)
旋回駆動制御装置及びこれを含む建設機械
【課題】電動機及びインバータを大型化することなく、大型の建設機械にも搭載可能な旋回駆動制御装置及びこれを含む建設機械を提供することを課題とする。
【解決手段】前記旋回機構に機械的に接続される第1電動機及び第2電動機と、前記旋回機構の操作部を介して入力される操作量に基づき、前記第1電動機の回転速度を制御するための速度指令を出力する速度指令出力部と、前記第1電動機の回転速度を検出する回転速度検出部と、前記速度指令出力部から出力される速度指令と、前記回転速度検出部によって検出される回転速度とに基づき、前記第1電動機を駆動するための駆動指令を生成する駆動指令生成部と、前記駆動指令生成部によって生成される駆動指令を用いて前記第1電動機を駆動制御する第1駆動制御部と、前記駆動指令生成部によって生成される駆動指令を用いて前記第2電動機を駆動制御する第2駆動制御部とを含む。
(もっと読む)
回転電機制御システム及び車両駆動システム
【課題】電圧変換部の故障を検出した場合に、平滑コンデンサの保護を目的としてモータとして働く回転電機が発生するトルクを制限する回転電機制御システムにおいて、例えば発進時に所要のトルクを発生することが可能な回転電機制御システムを得る。
【解決手段】直流電源、回転電機、周波数変換部、電圧変換部、トルク制限部を備えた回転電機制御システムにおいて、電圧変換部の停止を必要とする異常を検出する異常検出部を備え、当該異常検出部が異常を検出した場合に、トルク制限部が前記回転電機の回転速度が0未満の回転速度下限閾値未満の領域で正トルクの発生を制限し、正トルクを発生する領域を回転速度下限閾値以上の領域に設定する。
(もっと読む)
モータ制御装置
【課題】モータの位相制御に異常が生じた場合に異常の内容を把握する。
【解決手段】モータ制御装置100aを、互いの相対位相を変更可能な外周側回転子と内周側回転子を備えるモータ1と、相対位相に係る通電指令に応じて流体圧を制御する油圧制御装置13を具備する位相変更手段と、相対位相に係る実位相値を取得すると共に、通電指令に応じた相対位相に係る目標位相値と実位相値との差に基づき、油圧制御装置13の異常の有無を判定するフェール判定制御部67とを備えて構成した。
(もっと読む)
電動機システムの制御装置
【課題】電動機に備えた2つのロータ間の位相差を適切に制御しながら、その両ロータ間の位相差の変更動作に関する異常の有無を容易に判定する。
【解決手段】電動機1は、2つのロータ3,4を有し、両ロータ3,4間の位相差を位相差変更駆動手段23により変更可能である。制御装置50は、電動機1の誘起電圧定数パラメータの目標値Ke_cと観測値Ke_eとの偏差に応じて、該偏差を解消するように位相差変更駆動手段23を制御すると共に、該偏差に基づいて両ロータ間の位相差の変更動作の異常の有無を判定する手段55を備える。異常の有無の判定には、偏差の積分値を用いる。
(もっと読む)
ハイブリッド駆動装置、並びにその制御方法及び制御プログラム
【課題】回転電機のインバータに印加する電圧を昇圧可能な構成を備えたハイブリッド駆動装置において、出力軸に接続された第二回転電機がストール状態にある場合にも、第二回転電機の駆動制御用のインバータの発熱を抑えつつ、必要なトルクを出力軸に出力し得るハイブリッド駆動装置を提供する。
【解決手段】エンジンEが動作状態であり、第二回転電機MG2がストール状態である場合であって、動作点決定手段11により決定された第一回転電機MG1の動作点が、当該動作点での第一回転電機MG1の動作のために昇圧装置Coによる昇圧を必要とする昇圧領域に設定された場合に、当該動作点のトルクを一定トルクに維持したままで回転速度を低下させ、前記昇圧装置による昇圧を必要としない通常領域内に第一回転電機MG1の動作点を変更する。
(もっと読む)
電動機の制御装置
【課題】2つのロータを有する電動機の運転状態によらずに、両ロータ間の位相差を所要の応答特性で目標とする位相差に制御することができる電動機の制御装置を提供する。
【解決手段】電動機1は出力軸5と一体に回転する第1ロータ3とこの第1ロータ3に対して相対回転可能な第2ロータ4とを備え、各ロータ3,4は永久磁石6,8を有する。両ロータ3,4間の位相差θdを位相差変更駆動手段23を介して制御可能である。位相差検出器44による位相差検出値θd_sと、目標位相差データ決定手段54による位相差指令値θd_cとの偏差に応じてフィードバック制御処理により操作量Dt_cを決定し、この操作量Dt_cに応じて位相差変更駆動手段23を制御する位相差制御手段55を備える。位相差制御手段55は、フィードバック制御処理として、応答指定型のフィードバック制御処理を使用する。
(もっと読む)
電動機の制御装置
【課題】2つのロータを有する電動機の運転状態によらずに、両ロータ間の実際の位相差と目標とする位相差との偏差に応じたフィードバック操作量の過大な変動や頻繁な変動が生じるのを抑制し、両ロータ間の位相差の目標値への制御を安定して行なう。
【解決手段】電動機1は出力軸5と一体に回転する第1ロータ3とこの第1ロータ3に対して相対回転可能な第2ロータ4とを備え、各ロータ3,4は永久磁石6,8を有する。両ロータ3,4間の位相差θdを位相差制御手段54により位相差変更駆動手段23を介して制御可能である。位相差制御手段54は、位相差検出値θd_sと目標値θd_cとの偏差に応じてフィードバック操作量を決定する手段と、両ロータ3,4間に発生する外乱トルクの影響を補償するためのフィードフォワード操作量を電動機1の運転状態に応じて決定する手段とを有し、これらの操作量を合成した操作量に応じて位相差変更駆動手段23を制御する。
(もっと読む)
電動機の制御装置および制御方法
【課題】1つのディジタル演算手段を用いて複数の電動機の電流フィードバック制御を共通に行い、かつ複数の電動機毎に異なったキャリア周期でも使用可能な電動機の制御装置を提供する。
【解決手段】電流値の取り込みからPWM信号出力までを全て行うA処理と、A処理の一部を省略して前回演算した電圧指令値を用いてPWM信号の演算を行うB処理とに分け、それぞれの電動機における各演算処理の残り時間を検出し、次に行う演算処理については残り時間に応じてA処理とB処理の何れかを選択する、つまり、残り時間が十分あってA処理を行うことが可能であれば正常なA処理を行い、残り時間が少なくてA処理が無理であれば必要最低限のB処理を行うように構成した電動機の制御装置。
(もっと読む)
車両用制動制御装置
【課題】 本発明は、回生電力の充電ができない場合でも回生電力を適切に消費することができる車両用制動制御装置の提供を目的とする。
【解決手段】 車両に回生制動力を作用させる第1のモータを有する車両用制動制御装置において、前記第1のモータと異なる第2のモータを備え、前記第1のモータにより生ずる回生電力を蓄電可能な蓄電手段に充電ができない場合、前記第2のモータのトルク電流指令を略ゼロに、励磁電流指令を非ゼロにするディスチャージ制御を実行して、前記第2のモータのトルクを実質的に発生させることなく、前記第1のモータにより生ずる前記蓄電手段に充電できない回生電力を前記第2のモータで消費させることを特徴とする車両用制動制御装置。
(もっと読む)
モータ制御装置
【課題】放電制御時等のモータ停止状態でモータに通電する際に、回転子角度センサの検出誤差により生じるモータの回転をより低減する。
【解決手段】回転子角度センサ91,92は、互いにトルクが伝達するモータMG1,MG2の回転子角度を検出する。インバータ81,82は、モータMG1,MG2に電流を供給する。モータMG1,MG2を回転させないように、モータMG1,MG2に電流を流す通電制御を行う期間においては、モータECU10は、回転子角度センサ91により検出された制御開始時点での回転子角度に基づいて、モータMG1の発生トルクをゼロにするためのモータ駆動信号をインバータ81に与えるとともに、回転子角度センサ92により検出された制御開始時点での回転子角度に基づいて、モータMG2の発生トルクをゼロにするためのモータ駆動信号をインバータ82に与える。
(もっと読む)
1 - 19 / 19
[ Back to top ]