
Fターム[5H580BB10]の内容
ステッピングモータの制御 (5,935) | 目的 (781) | その他 (98)
Fターム[5H580BB10]に分類される特許
1 - 20 / 98
可動体駆動装置
【課題】遊技機に設けられた可動体を駆動するための、上位の制御装置の負荷を軽減可能な可動体駆動装置を提供する。
【解決手段】可動体駆動装置1は、遊技機に設けられた可動体の移動目的地を規定する制御コマンドを受信する通信部2と、可動体の現在位置を記憶する記憶部63と、その可動体の移動目的地と現在位置との差、またはその可動体の直前の動作における移動方向に基づいて、可動体の次の動作における移動方向を決定し、次の動作における移動方向に沿って可動体が移動目的地に達するまで可動体を移動させるように、可動を駆動する駆動ユニットを制御する制御部(61、62、7)とを有する。
(もっと読む)
遊技機

【課題】遊技の円滑な進行を妨げることなく回胴の加速処理を迅速に行って遊技興趣を増大して継続遊技の促進を図ることのできる遊技機を提供することにある。
【解決手段】1−2相励磁方式によるステッピングモータの回転駆動制御を行うに際して、加速期間中は、1相励磁よりも2相励磁の励磁時間が大になるように設定され、且つ2相励磁の時間を徐々に短くしている。加速期間中の1相励磁は最小単位時間(割込み処理1回の所要時間)に設定されている。トルクの弱い1相励磁の期間に対応するタイマ値を「1」にしてその時間を極力短くし、トルクの強い2相励磁の期間を長めに設定して、それを段階的に徐々に短くしているため、回胴起動後に速やかに定速回転状態に移行させて円滑な回胴遊技を促進することができる。
(もっと読む)
ステッピングモータの駆動回路、その集積回路およびそれを備える電子機器、ならびに、ステッピングモータの駆動回路の制御方法
【課題】ステッピングモータの駆動回路において、ステッピングモータへ励磁電流を供給するための配線の異常を検出する。
【解決手段】ステッピングモータ200の駆動回路100は、D/Aコンバータ120と、比較部131,132を含む電流制御部130と、異常検出部170とを備える。DAC120は、ステッピングモータ200に流れる励磁電流IOUT1,IOUT2の上限値を示す参照電圧VREFに基づいて定められる励磁電流についての目標値を示す目標電圧VA1,VA2を生成する。電流制御部130は、この目標電圧に基づいて励磁電流を制御する。比較部131,132は、励磁電流に対応する電圧RNF1,RNF2と目標電圧とを比較する。異常検出部170は、比較部からの出力信号CLOUT1,CLOUT2と、励磁電流の極性を示す制御信号PHA1,PHA2とに基づいて、駆動回路100とステッピングモータ200との間の配線の異常を検出する。
(もっと読む)
駆動回路、及び空気調和機の室内機用駆動回路
【課題】アクチュエータの駆動源に接続される配線を小径化し、当該配線と接続される制御基板上のコネクタの大型化防止を可能とする。
【解決手段】室内機1に備えられ、複数のフラップ毎に設けられたフラップ用モータM1〜M4を駆動する駆動回路であって、フラップ用モータM1〜M4を動作させるドライバ素子と、当該ドライバ素子のうち対応するドライバ素子と接続される1つのコモン接点、及び同一番号の接点が1つのフラップ用モータに接続されてなる切換接点を有する切換スイッチと、各切換スイッチの切換接点を同一番号の切換接点に切り換える切換信号を切換スイッチに出力する切換信号出力部、及びフラップ用モータM1〜M4を駆動する駆動信号をドライバ素子に出力する駆動信号出力部を有するマイコン101を備える。
(もっと読む)
ステッピングモータ駆動装置
【課題】ロータ停止判定を高精度に行うことができるステッピングモータ駆動装置を提供する。
【解決手段】A相出力部(11)は、ハイインピーダンス制御信号を受けてA相コイルの両端をハイインピーダンスにし、通電固定信号を受けてA相コイルの通電状態を固定し、B相検知制御部(14)から通電固定信号を受けてからA相コイルの駆動タイミングに同期してB相誘起電圧検知部(16)に検知期間信号を出力する。B相出力部(12)は、ハイインピーダンス制御信号を受けてB相コイルの両端をハイインピーダンスにし、通電固定信号を受けてB相コイルの通電状態を固定し、A相検知制御部(13)から通電固定信号を受けてからB相コイルの駆動タイミングに同期してA相誘起電圧検知部(15)に検知期間信号を出力する。停止判定部(17)は、検知部の検知結果に基づいて、ステッピングモータのロータが停止しているか否かを判定する。
(もっと読む)
遊技機
【課題】可動役物5を駆動させるステッピングモータ155を停止させる際にステッピングモータ155に過度の負荷がかかるのを防止することができるパチンコ遊技機1を提供すること。
【解決手段】パチンコ遊技機1は、励磁パルス信号をステッピングモータ155へ送信してステッピングモータ155を駆動させる駆動回路154と、励磁パルス信号を監視して、ステッピングモータ155が励磁状態であるか否かを判定し、かつ可動役物が所定の停止位置に到達したことを検知する、CPU151とを備えている。パチンコ遊技機1では、CPU151によって可動役物5が所定の停止位置に到達したことが検知され、かつ、ステッピングモータ155が励磁状態ではないと判定された場合のみ、CPU151が、駆動回路154がステッピングモータ155へ励磁パルス信号を送信することを停止させる。
(もっと読む)
車両用ヘッドアップディスプレイ装置
【課題】車両の乗員に違和感を与えることなく、車両関連情報の虚像の表示位置を調整する車両用HUD装置を、提供すること。
【解決手段】虚像36の表示位置を連続調整する調整指令が入力された場合に、安定点θsの間隔Iθよりも小さな設定角度Δθずつ電気角が変化するように駆動信号を制御することにより、ステッピングモータ40をマイクロステップ駆動する(S103)。その後、虚像36の表示位置を微調整する調整指令が入力された場合に、安定点θsの間隔Iθずつ電気角が変化するように駆動信号を制御することにより、ステッピングモータ40をフルステップ駆動する(S107)。
(もっと読む)
ステッピングモータ制御回路及びアナログ電子時計
【課題】コンパレータ回路等の電圧検出専用回路を設けることなく、過充電による二次電池の劣化を抑制すること。
【解決手段】少なくともステッピングモータ108に電力を供給する電源としての二次電池111と、ステッピングモータ108の回転状況を検出する回転検出回路109と、複数種類の駆動パルスの中からステッピングモータ108の回転状況に応じたエネルギの駆動パルスを選択して駆動する制御手段と、二次電池111を充電する太陽電池112とを備え、前記制御手段は、所定エネルギの過充電指示駆動パルスPkjによってステッピングモータ108を回転させることが可能と判定した場合、過充電指示駆動パルスPkjよりもエネルギの大きい過消費駆動パルスPksに変更して駆動する。
(もっと読む)
モータ
【課題】共通の回転軸に設けた複数のステータに少ない数の駆動回路でモータ電流を供給した場合でも、十分な回転数およびトルクを得ることのできるモータを提供すること。
【解決手段】ステッピングモータ100では、モータ部20を複数、モータ軸線L方向に配列し、複数のモータ部20の間において極歯215、225、265、275の角度位置を同一にしてあるため、大きなトルクを得ることができる。モータ部20のステータコイル24同士およびステータコイル29同士を直列に接続し、その分、駆動回路からの出力電圧を高く設定してある。このため、ステータコア24、29に十分なモータ電流を供給することができるので、十分な回転数やトルクを得ることができる。
(もっと読む)
モータ制御装置
【課題】モータを回転させる前に、設定値を確実に設定することができ、モータを適正に制御することができるモータ制御装置を提供する。
【解決手段】中央制御IC100は、分散制御IC110に対し、シリアル通信を行い、モータ回転方向信号CW/CCWおよび電流設定信号I1、I0を分散制御IC110に送信した後、所定時間WAIT待機する。中央制御IC100は、所定時間WAITが経過した後、ステッピングモータを回転させるためのクロックをモータドライバ200に出力する。
(もっと読む)
ステッピングモータ制御回路及びアナログ電子時計
【課題】 簡単な構成でステッピングモータの回転の有無を検出することにより駆動制御を行うこと。
【解決手段】 駆動パルス選択回路104が主駆動パルスP1によってステッピングモータ105を回転駆動すると、モータ電流検出回路107は、主駆動パルスP1による回転駆動期間中にステッピングモータ105に流れる駆動電流を検出して対応する駆動電流信号を出力し、微分回路108が前記駆動電流信号を微分した後、波形整形回路109が矩形波に波形整形した駆動電流信号を出力する。制御回路103は、波形整形回路109から単一の矩形波信号が入力された場合には非回転と判定し又、前記単一の矩形波信号の時間幅が所定時間T以上の場合には非回転の一種である中間止まりと判定し、補正駆動パルスP2によってステッピングモータ105を強制的に回転駆動する。
(もっと読む)
撮影装置
【課題】外乱の影響を受けやすい場合や、ステッピングモータを複数の速度領域で駆動する場合であっても、ステッピングモータの異常動作を確実に検出できる撮影装置を提供すること。
【解決手段】ステッピングモータに取り付ける遮光羽に、幅の異なる2種類以上のスリット孔1032aを形成しておく。幅の異なるスリット孔1032aに対応してHとなる期間の異なる2種類以上のPI信号が出力される。このPI信号をカウントすることによって脱調を判定する。
(もっと読む)
フィードフォワード電圧モードでステッパーモータを駆動する方法とハードウエア・システム
【課題】 ステッパ・モータを電圧モードで駆動する際に、モータの全速度範囲に亘ってステータの巻き線に生成される相電流の変動を押さえる。
【解決手段】 本発明のフィード−フォワード電圧モードでステッパ・モータを駆動する方法は、(A)前記ステッパ・モータを所望の速度で回転するために、ステッパ・モータのサイン波形の相電圧の振幅を、所定の値に設定するステップを有する。前記所定の値は、所望の速度の関数で予測されるBEMFと、相電流の所望の振幅(Iphase)と前記ステッパ・モータのインピーダンスの予測絶対値との積の和である。
(もっと読む)
電気的に整流される電動モータの障害を検出するための方法
【解決手段】本発明は、1又は複数のモータ巻線を有するユニポーラ型ステッピングモータへの供給電流を分析することにより、前記ユニポーラ型ステッピングモータの障害を検出する方法に関しており、前記ユニポーラ型ステッピングモータの動作のために電流供給変化に応じた動作電流を前記1又は複数のモータ巻線にモータ巻線接続部毎の制御可能なスイッチにより印加するステップを有しており、前記スイッチは、夫々のモータ巻線接続部を第1の供給電圧接続部に選択的に接続し、共通の電位にある各モータ巻線のモータ巻線接続部は第2の供給電圧接続部に常時接続されており、電流供給変化の段階が前記モータ巻線の切替と切替との間にあり、該段階中に、前記スイッチに接続されたモータ巻線のモータ巻線接続部が高インピーダンスに切り替えられ、少なくとも高インピーダンス段階にするために高インピーダンスに切り替えられたモータ巻線接続部での電圧を検出し、供給電圧の少なくとも1.5倍、又は少なくとも1.8倍、特には少なくとも2.0倍、好ましくは少なくとも2.5倍、又は少なくともより大きい整数又は非整数の倍数である閾値と前記電圧を比較するステップと、高インピーダンスに切り替えられたモータ巻線接続部での電圧が前記閾値より高い期間を検出するステップと、高インピーダンスに夫々切り替えられた複数のモータ巻線接続部に関して前記期間の長さを比較するステップと、前記期間の長さの比較に基づいて障害を検出するステップとを更に有する。  (もっと読む)
(もっと読む)
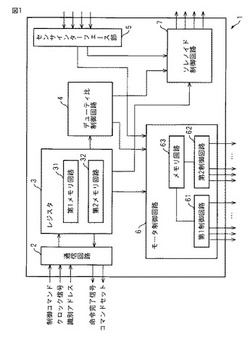
モータ駆動装置及び光学制御装置
【課題】高速駆動が可能で、かつ、複数のモータ駆動時における精度劣化を抑制するモータ駆動装置を提供する。
【解決手段】モータ駆動装置は、第1コイルへの通電の切り替えによって回転する第1ロータを備えた第1モータ108と、第1モータ108を駆動する第1ドライバ107と、第2コイルへの通電の切り替えによって回転する第2ロータを備えた第2モータ111と、所定の時間間隔に従って第2モータ111の第2コイルへの通電を切り替える第2ドライバ109と、位置センサ112の出力に応じて第2モータ111の第2コイルへの通電を切り替える第3ドライバ110と、第1モータ108を駆動するとともに第2モータ111を駆動する際には、第3ドライバ110ではなく第2ドライバ109で第2モータ111を駆動するように制御する制御回路105とを有する。
(もっと読む)
冷蔵庫
【課題】冷蔵庫の配線の異常を確実に発見し、信頼性の高い冷蔵庫を得ることを目的とする。
【解決手段】ステッピングモータにより駆動される電動ダンパと、該電動ダンパを制御する電動ダンパ制御装置を備えた冷蔵庫において、前記電動ダンパ制御装置はスイッチング電源トランスとステッピングモータドライブ回路と電圧降下素子を有し、該電圧降下素子は前記ステッピングモータドライブ回路とスイッチング電源トランスの零V側に接続し、前記電圧降下素子の印加電圧が所定電圧の場合、前記電動ダンパを駆動するための配線の異常を判断することを特徴とする。
(もっと読む)
ステッピングモータ制御装置およびプログラム
【課題】低コストかつ簡易な制御でステッピングモータを駆動させるための電力のピーク値を抑制することができるステッピングモータ制御装置およびプログラムを得る。
【解決手段】複数のステッピングモータの回転駆動の動作タイミングの基準となる基準クロック信号を生成する発振器12と、基準クロック信号に基づいて、前記複数のステッピングモータの回転速度を規定する速度制御用クロック信号を当該ステッピングモータの各々毎に生成する速度制御用クロック信号生成部13Aと、各々前記ステッピングモータの各々に対応して設けられ、対応するステッピングモータ用の速度制御用クロック信号に基づいて、対応するステッピングモータを回転駆動させる相励磁信号を生成する駆動回路18A〜18Dとを備え、CPU30により、ステッピングモータの各速度制御用クロック信号を各々の位相が互いに異なるように生成させるように制御する。
(もっと読む)
2相ステップモータ駆動回路
【課題】本発明は、4個の巻線をブリッジ接続して駆動することにより、バイポーラ方式の駆動回路で用いるアーム短絡防止回路を不要とすることを目的とする。
【解決手段】本発明による2相ステップモータ駆動回路は、一対のA相巻線(A1,A2)とB相巻線(B1,B2)をブリッジ接続して第1〜第4ノード(N1〜N4)を形成し、各ノード(N1〜N4)にHアーム(Q1,Q3,Q5,Q7)及びLアーム(Q2,Q4,Q6,Q8)を設け、アーム短絡防止回路を不要とする構成である。
(もっと読む)
モータ制御回路、モータ制御方法、サーマルプリンタ装置及び半導体装置
【課題】2相型ステッピングモータの高速回転における安定動作を行うモータ制御回路、モータ制御方法、そのモータ制御回路を用いたサーマルプリンタ装置及び半導体装置を提供する。
【解決手段】1相励磁と2相励磁とを切り換えて繰り返す1−2相励磁駆動で駆動される2相型のステッピングモータ52のモータ制御部30において、モータ制御部30で制御されるモータドライバ51は、1相励磁期間内の所定の期間に対して、その1相励磁の次の2相励磁と同じ相で2相励磁させる。
(もっと読む)
ステッピングモータの駆動装置
【課題】マイクロプロセッサによるモータへの通電異常を検出する。
【解決手段】所定の励磁パターンに従って、各ステップに定められた電流値で各コイル94,95に通電が行われるように制御するステッピングモータの駆動装置10において、励磁パターンに従って各ステップを推移させるように指令出力を行うマイクロプロセッサ1と、指令出力に基づくステップに定められた電流値となるように各コイルへの通電を行う制御回路20と、各コイルの通電電流値を検出する電流検出手段11と、各検出電流値を合計し、その絶対値を求める加算手段71,72と、検出電流の合計の絶対値が所定値を超える場合に各コイルへの通電を絶つ電流停止手段74,75とを備えている。
(もっと読む)
1 - 20 / 98
[ Back to top ]