
Fターム[5H680DD82]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 移動子、振動子の構造 (8,146) | 構成部材の形状 (1,109) | 板状のもの、帯状のもの (271)
Fターム[5H680DD82]に分類される特許
201 - 220 / 271
圧電アクチュエータ及びこれを備えた機器

【課題】 圧電素子の欠け、割れを低減し、振動の信頼性を持続し、構造が簡単で低コストの圧電アクチュエータと、この圧電アクチュエータを備え、高効率駆動の機器を提供する。
【解決手段】 圧電アクチュエータ10は、矩形薄板状の圧電素子80を含む振動体20を有するとともに、振動体20の振動方向が振動体20の面内方向である圧電アクチュエータ10であって、振動体20を支持する支持部材40が、振動体20の振動の中心節部となる位置近傍の断面周囲を巻回して支持している。また、支持部材40が、振動体20の振動の面内方向に対して略垂直となるように振動体20の表裏両方向を支持する支持軸43を備え、支持部材40が、付勢手段によって一方向に付勢されることによって、振動体20が、振動の面内方向にあるロータ90に付勢されている。
(もっと読む)
圧電ステータ素子及びそれを用いたマイクロ超音波モータ
【課題】高出力及び高トルクが得られ、構造体としての強度を高めることと低い駆動電圧で動作させることが両立出来、更には、生産性の向上が図れ、小型化の追求に好適なマイクロ超音波モータを実現すること。
【解決手段】柱状体を呈し、その柱状体の軸方向に並行して形成された複数の圧電駆動部を有し、その複数の圧電駆動部は、それぞれ交互に積層をされた複数の圧電体層と複数の電極層とが焼成一体化されてなる圧電ステータ素子を、ステータの主構成要素として採用したマイクロ超音波モータの提供による。このマイクロ超音波モータは、圧電ステータ素子の複数の圧電駆動部に位相の異なる交流電圧信号が印加されることにより、複数の圧電駆動部が軸方向に伸長乃至収縮の変位を生じ、柱状体の端面に、周回する進行波が発生し、この回転運動によってロータが回転するモータである。
(もっと読む)
圧電アクチュエータの製造方法

【課題】屈曲状の複数の駆動部とこれら複数の駆動部にそれぞれ配置された圧電層とを有する圧電アクチュエータを、より簡単に製造することが可能な製造方法を提供すること。
【解決手段】まず、板状部材24に、複数の貫通状のスリット28を形成して複数の駆動部20を分割形成する。次に、板状部材24に圧電材料の粒子を堆積させることにより、複数の駆動部20に複数の圧電層26をそれぞれ形成する。そして、各圧電層26にその厚み方向の電界を印加するための個別電極27を形成してから、複数の駆動部20を、板状部材24の面方向と直交する方向に突出するように折り曲げる。
(もっと読む)
超音波モータ
【課題】 駆動点の垂直方向成分と進行方向成分の変位と振動速度を別々に制御することを可能にする超音波モータを提供すること。
【解決手段】 摩擦接触面を押す方向に変位する押圧方向振動成分用圧電材料と、上記押圧方向振動成分用圧電材料とは別に配置され進行方向に変位する進行方向振動成分圧電材料と、を具備し、それによって、超音波モータの摩擦接触面を押す方向に変位する振動成分と、超音波モータの進行方向に変位する振動成分を別々に励振することが可能となる。
(もっと読む)
弾性表面波モータ
【課題】エネルギ回収型の弾性表面波モータにおいて、弾性表面波に生じる位相変化を調整してエネルギ効率の向上を図る。
【解決手段】弾性表面波モータ1は、弾性表面波素子基板2と、弾性表面波素子基板2の表面Sの弾性表面波進行方向の前後に配置されてエネルギの回収と供給を行うことによりエネルギの環流を行う一方向性櫛形電極31,32と、弾性表面波素子基板2の表面Sであって一方向性櫛形電極31,32の間に配置され外部電源V1,V2に接続されるエネルギ補填用櫛形電極41,42と、予圧Fが付与された状態で表面S部分に接触、配置されるスライダ5と、を備えている。スライダ5の接触面50の弾性表面波の進行方向と直交する幅方向の全幅aと、各一方向性櫛形電極31,32及びエネルギ補填用櫛形電極41,42における電極重なり幅bとは略等しい寸法とされている。
(もっと読む)
超音波モータ
【課題】 縦振動モードおよび屈曲振動モードの双方の振動モードをそれぞれ独立した形で、あるいは縦振動モードのみを特別な装置を用いることなく、容易に検出すること。
【解決手段】 駆動用の電気機械変換素子12(A+),12(A−),12(B+),12(B−)および振動検出用の電気機械変換素子12(C+),12(C−),12(D+),12(D−)を備え、前記駆動用の電気機械変換素子12(A+),12(A−),12(B+),12(B−)に所定の位相差および所定の駆動周波数の2相の交番電圧を供給することにより、異なる2つの振動モードを同時に発生させて出力端に略楕円振動を生じさせる超音波振動子を備える超音波モータであって、前記振動検出用の電気機械変換素子12(C+),12(C−),12(D+),12(D−)により縦振動モードおよび屈曲振動モードの双方の振動モードをそれぞれ独立した形で検出可能とされている。
(もっと読む)
駆動装置、撮像装置及び携帯電話
【課題】圧電素子の後端部のダミー層を利用することにより、圧電素子の後端面が前端面よりも変位することを防止でき、製造面で優れた駆動装置を提供し、その駆動装置を搭載した撮像装置及び携帯電話を提供すること。
【解決手段】圧電素子14の伸縮方向の一端に駆動棒18を取り付け、その駆動棒18に被駆動部材20を摩擦係合して構成され、圧電素子14の重心Gが伸縮方向において伸縮部の幾何中心位置Cより他端側に位置している。これにより、圧電素子14の伸縮の際にその一端側を他端側より大きく変位させることができ、被駆動部材20を効率よく移動させることができる。
(もっと読む)
超音波モータの運転方法
【課題】 複数の振動モードを同時に発生させる超音波モータにおいて、各振動モードを効率よく発生させて、安定して高いモータ出力を得ること。
【解決手段】 駆動用の電気機械変換素子および振動検出用の電気機械変換素子を備え、前記駆動用の電気機械変換素子に所定の位相差および所定の駆動周波数の2相の交番電圧を供給することにより、異なる2つの振動モードを同時に発生させて出力端に略楕円振動を生じさせる超音波振動子を備える超音波モータの運転方法であって、前記超音波振動子の出力端を被駆動体に押し付ける押圧力が、前記振動検出用の電気機械変換素子から出力された信号に基づいて、2つの振動モードの機械的共振周波数を一致させるように設定されている。
(もっと読む)
光学機器
【課題】 振動型リニアアクチュエータにおける振動部材と接触部材との面接触状態を常に維持する。
【解決手段】 光学機器は、レンズ2(12)と、電気−機械エネルギー変換作用により振動が励起される振動部材19および該振動部材と圧接する接触部材18を含み、該レンズを光軸方向に駆動する振動型リニアアクチュエータとを有する。振動部材19は、その圧接面に略平行な第1の軸28e回りでの回動および該接触面に略直交する第2の軸19eの方向への移動が可能となるように保持される。また、接触部材18は、その圧接面に略平行で、第1の軸に略直交する方向に延びる第3の軸24d回りでの回動が可能となるように保持される。
(もっと読む)
圧電デバイス、圧電デバイスの製造方法、及び電子機器
【課題】
振動体の振動により、移動体を摩擦駆動する超音波モータ及びそれを用いた電子機器に関し、特に駆動に用いる縦振動と屈曲振動の共振周波数が調整可能な振動体の構造及び調整方法に関する。
【解決手段】
そこで、本発明の超音波モータは、振動体には振動体に励振される屈曲振動の節近傍に付加質量部もしくは質量除去部を有する。もしくは振動体に励振される屈曲振動の腹近傍に付加質量部もしくは質量除去部を有する。もしくは振動体の長手方向略先端部には付加質量部もしくは質量除去部を有する構成とする。これにより縦振動及び屈曲振動の共振周波数を希望通りに修正する。
(もっと読む)
圧電素子の配線構造、圧電アクチュエータ及び電子機器
【課題】 電極部への負荷を低減する圧電素子の配線構造、この配線構造を有する圧電アクチュエータ及び電子機器を提供する。
【解決手段】 正電極用配線部21、負電極用配線部23及びアース用配線部25を、高弾性率を有する第1〜第3絶縁層27〜29及び第1〜第3導電層31〜33から形成した。これにより、正電極用配線部21、負電極用配線部23及びアース用配線部25を形成したことによる第1及び第2ピエゾ素子13,15の振動特性の劣化及び屈折効率の低下を軽減させることができる。導電性ペーストはレーザ等の熱光源にて局所的に加熱することで、硬化できるので、第1及び第2ピエゾ素子13,15の分極性能に影響を及ぼすことなく第1〜第4正電極部A1〜A4及び第1〜第4負電極部B1〜B4に接着することができる。
(もっと読む)
直動案内装置
【課題】真空中に配され、作業テーブルとともに移動する駆動モータなどの発熱源を有する直動案内装置で、発熱源で発生する熱を真空槽の所定位置まで金属ベルトを介して熱伝導によって搬送して放熱することにより、発熱源近傍の温度上昇を効率よく防止し、直動案内装置の機能を損なうことなく、低コストで計測や加工などの精度を高く維持することにある。
【解決手段】真空槽内に、駆動モータによって作業テーブルを所定の方向に移動させる案内機構を設けた直動案内装置において、直動案内装置の運転時に、作業テーブルに前記駆動モータなどの発熱部を有し、発熱部で発生した熱を前記真空槽外に除去するための放熱部を備え、かつ発熱部と放熱部とを伝熱手段で連結し、該伝熱手段を介して発熱部で発した熱を放熱部まで熱伝導するようにした。
(もっと読む)
積層型圧電アクチュエータおよび積層型圧電アクチュエータ接着体
【課題】 圧電駆動部の端部における絶縁破壊の発生を抑制し、かつ、機械的強度を適切に保持した積層型圧電アクチュエータを提供する。
【解決手段】 アクチュエータ10は、圧電セラミックス層11と内部電極層12とが交互に積層されてなる圧電駆動部2と、圧電セラミックス層11どうしがその中央部で接合層14により接合され、その外周部に圧電セラミックス層11どうしが不連続となる不連続層15が形成されてなる応力吸収層部3と、圧電不活性な保護層部4とを有している。接合層14の中心から外周までの距離cと、内部電極層12の中心から外周までの距離aとを、0.73≦c/a≦0.95、の関係が満たされるように設定する。
(もっと読む)
超音波モータ駆動回路及び超音波モータ駆動方法
【課題】小型、かつ簡便な構成で超音波モータを安定して所定の状態で駆動できる超音波モータ駆動回路等を提供すること。
【解決手段】圧電素子105へ印加する信号を出力する発振部101と、発振部101から出力された信号を移相する移相部102と、発振部101から出力された信号を増幅する第1の増幅回路103aと、移相された信号を増幅する第2の増幅回路103bと、第1の増幅回路103aからの信号の電流、または第2の増幅回路103bからの信号の電流を電圧に変換する電流検出回路104と、電圧に変換された信号と移相された信号とを積算する積算器106と、積算された信号のうちの直流成分を抽出するローパスフィルタ107と、ローパスフィルタ107からの出力が所定値となるように発振部を制御する比較判定部108とを有することを特徴とする。
(もっと読む)
弾性表面波モータ
【課題】弾性表面波モータにおいて、エネルギ効率の向上を実現する。
【解決手段】弾性表面波モータは、表面Sに外部電源に接続されたエネルギ供給用櫛形電極を有するステータとなる弾性表面波素子2と、予圧付与手段4によって予圧Fが付与された状態で弾性表面波素子2の表面Sに表面Sと接触して配置されるスライダ3と、を備えている。スライダ3の弾性表面波素子2の表面Sとの接触面30、すなわち表面Sに対向している面には、弾性表面波の波長をλとして弾性表面波の進行方向に対してλ/4の間隔で配置された接触突起5が、スライダ3の接触面30の全幅bにわたって設けられている。接触突起5が、スライダ3が弾性表面波素子2の表面Sに接触することによって誘起される弾性表面波の反射を打ち消す反射打消手段を構成する。
(もっと読む)
圧電アクチュエータモジュール、モータモジュールおよび装置
取り扱いが容易で薄型化が図れ、汎用性の高い圧電アクチュエータモジュールを提供する。 圧電アクチュエータモジュール10は、電極を有する圧電アクチュエータ本体21と、外部から駆動信号が入力され、前記電極に前記駆動信号を供給する信号入力端子18A〜18Dと、圧電アクチュエータ本体21と略同一平面上に配置され、圧電アクチュエータ本体21により駆動され回転運動する回転体22と、回転体22および前記信号入力端子が電気的に接続された前記圧電アクチュエータ本体を収納する筐体15と、筐体15より露出され、回転体22により直接的あるいは間接的に伝達された回転運動を外部に出力するための出力軸12と、を備える。 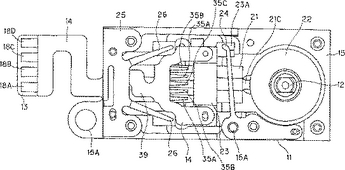 (もっと読む)
(もっと読む)
圧電アクチュエータ
【課題】 応答性を向上するとともに可動体の位置決めを高精度に行うのに好適な圧電アクチュエータを提供する。
【解決手段】 圧電アクチュエータ7は、圧電素子12と、圧電素子12の一方の面に設けられた2つの電極膜10a,10bと、圧電素子12の他方の面に設けられた電極膜10cと、電極膜10a,10bに電圧を印加する電源22a,22bと、電源22a,22bを制御する制御部26とを有して構成される。制御部26は、周波数が圧電素子12の共振周波数未満でかつ位相が90°異なる2つの電圧波形の電圧を電極膜10a,10bにそれぞれ印加するように電源22a,22bを制御する。
(もっと読む)
振動駆動移動体
【課題】移動機構の小型化を現実のものにすることが期待されている。本発明はこの課題を解決するためになされたもので、微小作業機械を駆動することができる、小型でシンプルかつ高性能な振動駆動移動体を提供するものである。
【解決手段】単体または複数の振動子3と、振動子3に接続してループを形成する弾性体2を一体化し、載置面5に接触する少なくとも3の接地脚を有し、交流電源6によって駆動された振動子3の振動が載置面5に伝達され、少なくとも3の接地脚が位相差を持って振動することによって、該接地脚と載置面5との摩擦により載置面5上を移動することを特徴とする振動駆動移動体1。
(もっと読む)
超音波モータ
【課題】温度上昇が生じにくく長寿命な超音波モータを提供する。
【解決手段】超音波モータ1は、超音波領域の振動を発生させる振動体2と、この振動体2に接合され振動体2の振動に伴って振動する駆動チップ3と、振動体2を収納するケース4と、を備えている。このケース4はアルミ合金等の金属材料で構成されており、バネ等の弾性支持体34を介して振動体2を支持している。ケース4の内面には、金属材料よりも放射熱の吸収率が高いセラミックで構成された薄膜状又はシート状の吸熱部材Hが被覆されている。
(もっと読む)
超音波モータの制御方法
【課題】 移動体を、位置偏差を小さくして高精度に移動させることができる超音波モータの制御方法を提供する。
【解決手段】 フィードフォワード制御およびフィードバック制御を併用して超音波モータ10を制御する。フィードフォワード制御では、超音波モータ10を駆動することによって移動する移動体15の移動範囲における超音波モータ10の駆動力の変動を予めデータ化し、実際の超音波モータ10の駆動時には、移動体15の位置情報にしたがって、例えば、速度フィードフォワードゲインを決定するための係数Kvfを、このデータに基づいて変化させる。
(もっと読む)
201 - 220 / 271
[ Back to top ]