
Fターム[5H680GG41]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 材料、その他 (761) | 数値限定あり (85)
Fターム[5H680GG41]の下位に属するFターム
Fターム[5H680GG41]に分類される特許
1 - 20 / 20
振動アクチュエータ、レンズ鏡筒及びカメラ
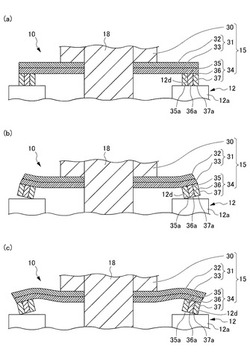
【課題】常温での回転時に異音の発生を低減することができるとともに、低温条件下や高温条件下における起動特性の低下を低減することができる振動アクチュエータを提供すること。
【解決手段】電気機械変換素子13の駆動により振動波を生じる弾性体12と、弾性体12と加圧接触し、振動波によって回転軸を中心に弾性体12に対して相対的に回転される相対移動部材15と、を備え、相対移動部材15は、弾性体12に接触可能でかつ相対移動部材15の回転軸に直交する径方向において互いにヤング率の異なる同心の複数の円環状に形成される接触部35a,36a,37aを有し、相対移動部材15が変形しない場合と変形する場合とにおいて、接触部におけるヤング率の異なる部分が弾性体12に接触する。
(もっと読む)
振動波モータ

【課題】出力性能が安定して経時的変化が少なく、鳴きの発生が抑制された振動波モータの提供。
【解決手段】表面に進行波を発生する振動体12に、摩擦材14を介して動体13を加圧接触させ、進行波によって生じた摩擦力を利用して、動体13を移動させる振動波モータ1において、摩擦材14を、振動体12又は動体13の、これらが対向する面に固定し、摩擦材14を、液晶高分子を含み且つ流動開始温度が350℃以上である成形材から得られた成形体とする。
(もっと読む)
振動アクチュエータ、レンズ鏡筒及び電子機器
【課題】製造が容易であり、異音が発生せず駆動性能の良好な振動アクチュエータ、レンズ鏡筒及び電子機器を提供すること。
【解決手段】振動を発生する振動子と、振動子と加圧接触され、振動によって振動子に対して相対移動する相対移動部材とを備え、振動子の相対移動部材に対する第一接触面、及び、相対移動部材の振動子に対する第二接触面、の一方は、弾性率が5GPa以下となるようにフッ素樹脂を含む樹脂膜で形成されており、第一接触面及び第二接触面の他方は、クルトシスが3.5〜6.5となるようにクロム化合物で形成されている。
(もっと読む)
振動アクチュエータ、レンズ鏡筒及びカメラ
【課題】磨耗が少なく且つ駆動音の小さい振動アクチュエータを提供する。
【解決手段】本発明の振動アクチュエータ100は、電気機械変換素子33,34の励振により振動する振動子32と、前記振動子32に加圧接触されて前記振動によって駆動され、前記振動子32に対して相対移動する相対移動部材120と、を備え、前記相対移動部材120の密度が前記振動子32より小さく、前記相対移動部材120のヤング率が前記振動子32より大きいこと、を特徴とする。
(もっと読む)
駆動装置
【課題】凝着の発生を抑制しつつ、異音の発生を抑制する
【解決手段】駆動装置1は、振動を発生させるアクチュエータ本体4とアクチュエータ本体4に設けられてアクチュエータ本体4の振動に伴って周回運動することにより駆動力を出力する駆動子3,3とを有する超音波アクチュエータ2と、駆動子3,3が当接していて、超音波アクチュエータ2に対して相対移動する移動体13とを備えている。移動体13における、駆動子3,3と当接する当接面13bは、平滑部13c,13c,…と、平滑部13cよりも凹んだ凹部13d,13d,…とが混在している。
(もっと読む)
振動型駆動装置
【課題】摩擦係合部材を樹脂で形成しながら起動電圧が高くならない振動型駆動装置を提供する。
【解決手段】電気機械変換素子3によって往復変位させられる駆動部材4と、駆動部材4に摩擦係合する摩擦係合部材5とを有し、摩擦係合部材5は、駆動部材4を挟み込む受け部材6と押さえ部材7とを含む振動型駆動装置1において、受け部材6を樹脂で成形し、受け部材6の駆動部材4に当接する摺動面の表面粗さを中心線平均粗さ0.9μm以上とする。
(もっと読む)
駆動装置、レンズ部品、及びカメラモジュール
【課題】スイッチング信号の周波数帯域を拡大すること。
【解決手段】駆動装置は、ピエゾ素子42及び伝達軸44が連結した連結体と、伝達軸44の長手方向に沿って摺動可能な状態で直接的又は間接的に伝達軸44が係合したケース50と、ピエゾ素子42の駆動に応じてケース50に対して連結体と共に変位するレンズホルダ31(レンズL1、L2)と、を備える。伝達軸44は比重2.1以下の材料で構成されている。より好ましくは、伝達軸44は、弾性率20GPa以上の材料で構成される。更に好ましくは、伝達軸44は、弾性率30GPa以上の材料で構成される。
(もっと読む)
電気機械変換アクチュエータおよびレンズモジュール
【課題】 大きな比重と耐食性があり、かつ、圧電素子との接着強度を強固にした錘を有する信頼性の高い電気機械変換アクチュエータおよびその電気機械変換アクチュエータを用いた移動速度が大きく良好なレンズ駆動が可能なレンズモジュールを提供する。
【解決手段】 磁石1と圧電素子3と錘2とからなり、圧電素子3の一端に錘2が接着され、圧電素子3の他端に磁石1が接着されて構成されている。錘2の組成がW:85%以上98%以下、Ni:1%以上12%以下、Mo:0.1%以上2.0%以下、Fe:1.0%以下、または、W:85%以上98%以下、Ni:1%以上12%以下、Mo:0.1%以上2.0%以下、Co:2.0%以下であり、錘2が焼結方法により製造され、錘2の圧電素子3との接着面の平均表面粗さRaが0.1μmより大きく60μm未満である。
(もっと読む)
超音波モータ
【課題】駆動が容易で且つ被駆動体に対する固定を容易としつつ、大きなヘッド変位量を得ることを可能ならしめる超音波モータを提供する。
【解決手段】超音波モータ100は、被駆動体に当接させるヘッド11と、駆動電圧が印加された際の伸縮方向が所定角度で交差するようにヘッド11に固定された2個の圧電素子12a,12bと、ヤング率が40GPa以上220GPa以下の材料からなり、圧電素子12a,12bをそれぞれ保持する第1,第2保持部13a,13bおよびこれらを連結する連結部13cとからなる凹型形状の保持部材13を具備する。被駆動体の移動方向に応じて2個の圧電素子12a,12bのいずれか一方が駆動され、その際に保持部材13を含めた共振を利用してヘッド11を動かすことにより被駆動体に力を加えて被駆動体を動かす。
(もっと読む)
超音波モータの駆動方法
【課題】超音波モータの安定かつ効率の良い駆動方法を提供すること。
【解決手段】本発明にかかる超音波モータの駆動方法は、第1周波数の交流電圧をアクチュエータ部に印加して前記超音波モータを始動する工程と、前記第1周波数から前記超音波モータが停止する第2周波数まで駆動周波数を下げながら、該アクチュエータ部に生じる電圧を検出する電圧検出工程と、第3周波数で前記超音波モータを始動する始動工程と、前記駆動周波数を運転周波数範囲内の値となるように、前記第3周波数から低周波数側に変化させる駆動工程と、を有し、前記運転周波数範囲は、前記電圧検出工程において最大電圧が検出される際の前記駆動周波数の値よりも高周波数側の範囲である。
(もっと読む)
圧電アクチュエータ及びその駆動方法
【課題】駆動信号の供給先となる圧電素子を切り替えること無く、被駆動体の駆動方向を変更可能とする技術を提供する。
【解決手段】圧電アクチュエータは、少なくとも1つの圧電素子(120)と、被駆動体(MB)に駆動力を作用させるための作用端(130)とを有し、圧電素子(120)の変形に応じて作用端(130)が振動する圧電素子構造体100を備える。圧電アクチュエータは、さらに、圧電素子(120)に電圧を印加するためのドライバ回路(300)と、ドライバ回路(300)に矩形波状の駆動信号(DV,#DV)を供給することによって、作用端(130)を振動させる駆動制御回路(200)と、を備える。駆動制御回路(300)は、駆動信号(DV,#DV)のデューティ比を変更することによって被駆動体(MB)の駆動方向を反転可能である。
(もっと読む)
弾性振動体の励振方法および振動型駆動装置
【課題】設計を容易化するとともに設計の自由度を確保でき、さらに、低コスト化を図る上で有利な振動型駆動装置を提供する。
【解決手段】振動型駆動装置10は、ベース12と、2つの支持体14と、弾性振動体16と、駆動回路18とを備えている。2つの支持体14は断面が矩形状を呈し、断面の縦横よりも大きい寸法の高さを有する柱状に形成されている。支持体14は、入力される駆動信号に応じて高さ方向に伸縮する電気−機械エネルギー変換素子から形成されている。弾性振動体16は、本体板部20と突起部22とを備えている。突起部22の上端22Aは、この突起部22の振動によって動かされる被振動体に当て付けられる。駆動回路18は、第1、第2の支持体14A、14Bにそれぞれ第1の駆動信号SA、第2の駆動信号SBを供給する。
(もっと読む)
圧電アクチュエータ
【課題】 発熱による異常摩耗を未然に防止するとともに、圧電素子を効率よく動作させるのに好適な圧電アクチュエータキ装置を提供する。
【解決手段】 圧電アクチュエータ7は、圧電素子12と、可動体を設置する走行プレート6と、走行プレート6と圧電素子12の間に設けられたフィンガ8とを備え、圧電素子12に電圧を印加することにより圧電素子12を変位させ、その変位によって可動体を駆動する。また、温度変化により抵抗値が変化する導線13をフィンガ8に巻き付け、フィンガ8の温度を検出する。
(もっと読む)
電気機械変換素子を用いた駆動装置
【課題】 往復駆動を繰り返していくにつれて生じる係合部材の経時的な移動速度の低下を概ねなくすとともに、低温環境下においても係合部材の移動速度の上限値の低下を概ねなくすことができる。
【解決手段】 電気機械変換素子15と、前記電気機械変換素子の伸縮方向一端に固定された駆動摩擦部材17と、前記駆動摩擦部材に摩擦力で係合する係合部材11とを備え、前記電気機械変換素子15に電圧を印加して伸縮させることで、前記駆動摩擦部材17と前記係合部材11とを相対移動させる駆動装置であって、前記電気機械変換素子15に周波数10kHz以上300kHz以下の電圧を印加し、前記駆動摩擦部材15と前記係合部材11の係合部分に、基油動粘度が0℃において300mm2/s以下であるグリースを塗布する。
(もっと読む)
駆動装置、撮像装置及び携帯電話
【課題】圧電素子の後端部のダミー層を利用することにより、圧電素子の後端面が前端面よりも変位することを防止でき、製造面で優れた駆動装置を提供し、その駆動装置を搭載した撮像装置及び携帯電話を提供すること。
【解決手段】圧電素子14の伸縮方向の一端に駆動棒18を取り付け、その駆動棒18に被駆動部材20を摩擦係合して構成され、圧電素子14の重心Gが伸縮方向において伸縮部の幾何中心位置Cより他端側に位置している。これにより、圧電素子14の伸縮の際にその一端側を他端側より大きく変位させることができ、被駆動部材20を効率よく移動させることができる。
(もっと読む)
駆動装置
【課題】金属材料で形成する場合に比べて低コスト化と軽量化を図れるとともに、移動速度や駆動力を低下させることなく高剛性の可動子を用いた高性能駆動装置を提供する。
【解決手段】電圧が印加されることにより伸縮する圧電素子2と、圧電素子2の伸縮方向一端に固定された駆動軸3と、駆動軸3に摺動可能に摩擦係合する可動子4とを備え、圧電素子2の伸びと縮みの速度または加速度を異ならせて駆動軸3を振動させることにより、可動子4を駆動軸3に沿って移動させる駆動装置1であって、可動子4を炭素繊維を含む液晶ポリマーで形成した。
(もっと読む)
駆動装置
【課題】 複数の振動型モータからの駆動力を合成して出力する駆動装置において、振動型モータの駆動特性の差によって、鳴き現象が発生することがある。
【解決手段】 電気−機械エネルギ変換素子への駆動信号の印加によって振動を励起する振動体と、振動体に接触する接触体とを相対的に駆動する複数の振動型アクチュエータ(9〜14)と、これら振動型アクチュエータからの駆動力を合成して被駆動部材に伝達する動力伝達機構(1、2、3〜8)とを有する。各振動型アクチュエータにおける振動体の共振周波数が、所定の共振周波数に対して、所定の共振周波数の略1%以下の範囲内である。
(もっと読む)
振動アクチュエータ
【課題】駆動効率の高い振動アクチュエータを提供する。
【解決手段】圧電素子12の弾性体11側と反対側であり、圧電素子12と加圧板41との間に、ステータ部10の端面に沿って、密度が例えば0.4×103kg/m3以下の発泡体によって形成されたステータ支持部30を設けることにより、弾性体11の振動に追従して振動する部分の質量を小さくし、振動エネルギーの損失を小さくすることにより振動アクチュエータの駆動効率を向上させることを実現した。
(もっと読む)
圧電アクチュエータおよび機器
【課題】 駆動性能の確実性を向上させることができる圧電アクチュエータおよび機器を提供すること。
【解決手段】 検出電極82D,82Eを、屈曲振動モードの振動の腹を含む位置に形成した。このため、屈曲の歪も最大となり縦振動モードの位相差の影響を打ち消すことができる。また、屈曲振動モードを励振するのに使用する側の駆動電極82B,82Cの位置にそれぞれ検出電極82D,82Eを形成した。これにより、縦振動モードとは逆符号の屈曲振動モードの位相差が生じるので、縦振動モードが主である周波数と、屈曲振動モードが主である周波数との位相差による区別が容易になり、各周波数の振動挙動に基づいて的確に制御できる。したがって、縦振動モードの振動による良好な駆動力の確保が確実となる。
(もっと読む)
少なくとも1つの圧電アクチュエータを備えた回路
制御回路(3)が駆動指令(S*)を与えた場合、駆動回路(1)は、圧電アクチュエータ(Pi)に対して駆動信号(S)を出力し、この駆動信号(S)により、圧電アクチュエータ(Pi)が、0位置から駆動位置に移行し、制御回路(3)が補正指令(I1*、I2*)をプリセットした場合、補正回路(2)は、圧電アクチュエータ(Pi)に対して補正信号(I1、I2)を出力し、圧電アクチュエータ(Pi)が、0位置から補正位置に移行し、駆動指令(S*)のプリセットと、補正指令(I1*、I2*)のプリセットとが、互いに関してロックしあう(verriegelt)ように、制御回路(3)が構成されている。  (もっと読む)
(もっと読む)
1 - 20 / 20
[ Back to top ]