
Fターム[5J070BD03]の内容
レーダ方式及びその細部 (42,132) | 組合せ (788) | 一次レーダと二次レーダ (31)
Fターム[5J070BD03]に分類される特許
21 - 31 / 31
距離測定装置、距離測定方法、反射体、および通信システム
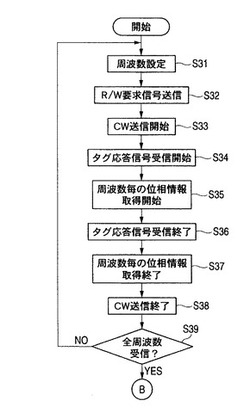
【課題】RFIDタグの距離を精度よく測定する。
【解決手段】送信制御部は、変調部を制御し、タグ応答信号の送信を要求するR/W要求信号を第1の周波数f1でRFIDタグへ送信する。RFIDタグは、第1の周波数に応じた搬送周波数からなるタグ応答信号を返信する。タグ応答信号を受信すると、位相情報取得部は、第1の受信信号を複素表現で表したx1(t)を算出し、第1の周波数f1に対応させてテーブルに記憶する。周波数制御部が、R/W要求信号を第2の周波数f2となるようにPLL部を制御する。同様にして第Nの周波数が全て確認されるまで繰り返す。位置測定部が、前記テーブルから各周波数の受信信号xn(t)を読み出し、各周波数の受信信号に基づいて相関行列Rxxを作成し、MUSIC評価関数のスペクトラムを作成することによって、ピーク値の探索を行うことによりリーダライタとRFIDタグとの距離を算出する。
(もっと読む)
位置検出システム

【課題】移動体側のアンテナが,複数の無線タグと通信しうる距離関係になった場合にも,上記移動体と無線タグとの相対位置を検知出来るようにした位置検出システムを提供すること。
【解決手段】前記複数の無線タグに対して相対的に移動する移動体に搭載され,各無線タグから発信された前記固有の識別情報を含む電波信号を受信する複数のアンテナを備えており,前記通信手段から上記電波信号発信手段への前記通信要求を含む電波信号の送信電力を変化させることによって,1つの電波信号発信手段と上記アンテナとの間で通信可能な限界の送信電力を検出し,検出された1つの電波信号発信手段と各々のアンテナとの間で通信可能な限界の送信電力から演算される各々のアンテナと上記1つの電波信号発信手段との距離の比率から前記アンテナと前記電波信号発信手段との相対位置を検出する位置検出システム。
(もっと読む)
屋内迷子捜索システム
【課題】引率者からはぐれてしまった人の現在位置を精度良く特定する屋内迷子捜索システムを提供する。
【解決手段】屋内迷子捜索システムは、登録した人が履く靴の靴底に付けら且つ個体識別番号が記憶されたRFIDカードと、床面に設置され且つ上記登録した人が履く靴の靴底が接近したときに上記RFIDカードから個体識別番号を読み取るリーダと、屋内を見渡せる箇所に設置され且つ捕捉した人の位置を検出するレーダと、上記リーダの設置位置と上記レーダが捕捉した人の位置との相関を求めるとともに相関が認められるときには上記レーダが捕捉した人が上記RFIDカードを付帯していると判定し上記個体識別情報および位置情報を含むリーダ・レーダ情報を送出し、且つ相関が認められた位置に居る人を以後上記レーダおよび上記リーダにより追尾し上記リーダ・レーダ情報を送出する検索者検出装置と、を有する。
(もっと読む)
接近通報用のレーダ波中継装置
【課題】見通しの悪い交差点などにおける車両(移動物体)の出会い頭の衝突を防止する。
【解決手段】移動物体からのレーダ波を受信するレーダ波受信部21Aと、該レーダ波受信部21Aで受信されたレーダ波を該移動物体に向けて折り返し送信する折り返し送信部23Aと、該折り返し送信部23Aから送信された折り返しレーダ波の該移動物体での反射波を受信する反射波受信部25Aと、該折り返しレーダ波と該反射波とから該移動物体の速度情報に応じた周波数信号Δfaを検出する速度情報検出部26Aと、該速度情報検出部26Aにて検出された前記周波数信号Δfaと該レーダ波が送信されてきた方向とは異なる他方向に位置する他の移動物体からの折り返しレーダ波とをミキシングして前記他方向へ送信する速度情報付加送信部30Bとをそなえる、ようにする。
(もっと読む)
側位システムおよび無線通信装置
【課題】移動局と基地局および基地局同士の同期システムが不必要であり、設置する基地局数が最低1個あれば移動局の位置を算出することの可能な側位システムを提供する。
【解決手段】1つの基地局200により側位の対象となる移動局100は、タイミング信号をトリガにして生成された超広帯域(UWB)方式による信号を基準拡散符号(PN0)で拡散して基準拡散信号とする基準拡散器104と、基地局から反射信号を受信する第1、第2の受信部110、118と、第1の受信部で受信した信号から所定の拡散符号(PN1)との相関により反射信号を検出する第1の相関器114と、第2の受信部で受信した信号から所定の拡散符号(PN1)との相関により反射信号を検出する第2の相関器118と、第1、第2の相関器により検出された反射信号とタイミング信号との時間差を測定する時間差測定部126とを備える。
(もっと読む)
航空管制用レーダシステム
【課題】離陸直後に出発機が急旋回する等の航路を取った場合にも機影を見失うことなく確認することができ、また滑走路周辺の離発着機情報を捉えることができる航空管制用レーダシステムを提供する。
【解決手段】航空管制用レーダシステムは、空港監視レーダ(ASR)と、二次監視レーダ(SSR)と、精測進入レーダ(PAR)と、所定の出発機についてSSRおよびASRによってそれぞれ得られる出発機情報とこの出発機についてPARによって得られる出発機情報とに基づいて出発機の追尾を行う。また、ASRで得ることができない滑走路周辺の離発着機情報をPARで補間し追尾を行う構成とすることができる。
(もっと読む)
計器着陸システムの望ましくない信号を除去する方法及びシステム
【課題】 航空誘導システムにおいて望ましくない信号を除去する。
【解決手段】
航空誘導システムにおいて望ましくない信号を除去する方法は、振幅変調の第1の周波数を有する、少なくとも1つの第1の望ましい信号を受け取るステップと、振幅変調の第2の周波数を有する、少なくとも1つの第2の望ましい信号を受け取るステップと、前記第1と第2の望ましい信号の少なくとも1つと実質的に同じかあるいはその低調波である周波数を含む任意の周波数を有する少なくとも1つの望ましくない信号を受け取るステップを含む。前記振幅変調の第1と第2の周波数は位相が同期しており、前記望ましくない信号は前記第1と第2の望ましい信号の少なくとも1つと同期しない。この方法は、前記望ましくない信号を識別するステップと、当該望ましくない信号を除去するステップとも含む。
(もっと読む)
飛行場用気象レーダ装置とその風観測運用方法と風観測システム
【課題】飛行場用として、降雨・非降雨にかかわらず、風観測を可能にする。
【解決手段】空中線装置15によりレーダパルスを放射して降雨エコーを受信し、信号処理装置11にてその信号強度から降雨状況を観測して、降雨状況に応じて降雨時観測モードと非降雨時観測モードを選択的に切り替える。ここで、降雨時観測モードでは、エコー成分を観測し、この観測結果から風向・風速を算出するものとし、非降雨時観測モードでは、受信信号を積算してSNを向上させ、ブラック散乱によるエコー成分を観測し、この観測結果から風向・風速を算出する。
(もっと読む)
空港面監視システムおよびこれに用いる航跡統合装置
【課題】 複数の目標検出装置を併用して空港面を監視する場合において、各目標検出装置の位置検出精度に応じた正確な統合航跡の座標位置を決定する。
【解決手段】 複数の目標検出装置を併用して空港面を監視し、前記複数の目標検出装置により検出された同一目標物についての航跡情報から統合航跡を生成して表示部に表示する空港面監視システムにおいて、空港面のセンターライン情報を蓄積したセンターラインデータベースからセンターライン情報を読み出し、そのセンターライン情報を用いて複数の目標検出装置により検出された各航跡情報の座標位置から基準センターラインまでの垂直距離をそれぞれ算出し、それら垂直距離に基づく重み付け割合により前記同一目標物について統合航跡の座標位置を決定する。
(もっと読む)
二次監視レーダ応答信号受信装置及び二次監視レーダ応答信号受信方法
【課題】簡易的に航空機の位置を特定することが可能な二次監視レーダ応答信号受信装置及び二次監視レーダ応答信号受信方法を提供することを目的とする。
【解決手段】高度と応答信号が受信された際の仰角とから航空機との直線距離を算出し、直線距離と応答信号が受信された際の方位角とからX軸及びY軸における航空機との距離を算出する3次元位置演算部43を設ける。
(もっと読む)
合成開口を用いた無線ベースの位置決定システム
本発明は、移動局および少なくとも1つの位置固定局を有する無線ベースの位置決定システムの測定精度を高める方法に関する。本発明の特徴は、
− スタート位置から出発した上記の移動局の運動を絶対センサシステムおよび相対センサシステムの測定データによって検出し、
− この測定データを用いて開口合成の形態で仮想アンテナを形成し、
− この開口合成を使用することによって、前記の移動局を位置固定局に、および/またはこの逆に互いに焦点合わせすることである。  (もっと読む)
(もっと読む)
21 - 31 / 31
[ Back to top ]