
Fターム[5J083AB06]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 用途 (922) | 海底判別 (33)
Fターム[5J083AB06]の下位に属するFターム
底質判別 (19)
Fターム[5J083AB06]に分類される特許
1 - 14 / 14
探知装置、探知方法、および探知プログラム
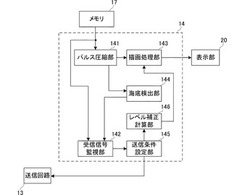
【課題】コストや回路規模の増大を抑えながら受信信号を飽和させない探知装置を提供する。
【解決手段】受信信号監視部142は、メモリ17から海底深度に応じた受信信号を読み出し、飽和状態を監視する。例えば、海底深度よりも数サンプル程度浅い深度に対応する受信信号から順に所定サンプル数の受信信号を読み出し、これらのサンプルの最大値が飽和レベルに達したか、あるいは飽和レベルに近づく場合飽和状態であると判定する。送信条件設定部145は、受信信号監視部142で受信信号が飽和状態であると判定された場合、送信信号の条件を変更する。すなわち、送信回路13に対し、次のpingから送信信号の出力を低減する設定を行い、受信信号の飽和を防止する。
(もっと読む)
超音波プローブ

【課題】 減衰が大きい測定対象であっても厚さ測定を正確に行なうことができる超音波プローブを提供する。
【解決手段】 本発明は、アニューラ状に配置され、複数の送信チャネルを形成し、第1の共振周波数を有する複数の送信用振動子11と、十字状に配置され、受信チャネルを形成し、第1の共振周波数よりも低い第2の共振周波数を有する複数の受信用振動子13とを具備する。十字状に配置された複数の受信用振動子の中心は、アニューラ状に配置された送信用振動子の径方向の中心に配置される。
(もっと読む)
海底検出方法および魚群探知装置
【課題】所定深度毎にその深度での海底検出レベルを演算し、この海底検出レベルを移動することにより海底を検出する方法および装置を提供することにある。また、この海底検出レベルを、海底反射を含む反射信号が横切る深度を記憶し、当該反射信号が検出レベルを上回る場合、当該反射信号の最大値と海底検出レベルとの差を所定の範囲とすることにより、安定して海底を検出する方法および装置を提供することにある。
【解決手段】海底を検出する方法において、所定深度毎に海底検出レベルを演算し、受信機で増幅検波した反射信号を所定深度毎に演算した海底検出レベルと比較し、比較の結果により演算した海底検出レベルを移動することを特徴とする。
(もっと読む)
海底熱水鉱床探測装置
【課題】海底におけるブラックスモーカーあるいはホワイトスモーカーの位置を測定する海底熱水鉱床探測装置を提供すること。
【解決手段】
送信部13より送信信号を送受波器11へ供給するとともに、送受波器11で受信した信号を受信部14へ供給する。送受波器11は、空孔率10%の多孔質PZT圧電体振動子で構成した。受信部14は、送信用信号と受信信号との差の周波数をとるヘテロダイン検波部を備えている。符号15は帯域通過フィルタである。符号17は、デジタルシグナルプロセッサであり、相関処理、FFTの演算処理を実行する。符号18は表示制御部であり、DSP17で求められたスモーカーのデータをモニタ19に適したビデオ信号に変換する。符号21はGPS電波受信用のアンテナであり、符号20はGPS信号から調査船1の位置を特定するための信号処理回路である。
(もっと読む)
超音波計測装置
【課題】船体の三次元位置及びロール,ピッチ,ヨウの6条件を把握することなく、高速運航下においても、海底形状を連続計測することができる超音波計測装置を提供する。
【解決手段】方位方向に周波数の異なる超音波を送波する送波器と、前記送波器から送波された超音波の対象物からの反射波を受波する受波器と、前記対象物からの反射波の情報を三次元計測結果として処理する処理手段とを備える超音波計測装置において、前記三次元計測結果を順次連結させる連結手段を含む。
(もっと読む)
水中情報収集システム
【課題】水中航走体の移動領域の制約を低減すること。
【解決手段】水中航走体1は、自己の有する動力で水中を移動可能であり、水中情報を収集するサイドスキャンソーナ10C等と、サイドスキャンソーナ10C等が集めた水中の情報を送信可能な水中側第1音響モデム12Hとを有している。水上移動体2は、水中側第1音響モデム12Hと通信可能であり、水中側第1音響モデム12Hから送信された水中情報を受信する水面側第1音響モデム22Hと、水中航走体1の位置を検出する水中位置計測装置21とを有する。そして、水上移動体2は、水中航走体1の位置を検出しながら、水中航走体1の移動に合わせて水面Hを移動する。
(もっと読む)
水中航走体及び水中航走体の編隊航行方法
【課題】水深データベースが用意されていない領域についても航行効率を低下させずに、航跡検出精度を向上させること。
【解決手段】水深データベースが用意されていない領域においては、慣性航法装置及び対地速度計の計測値に基づいて現在位置を特定し、この現在位置を用いて航跡を生成し、水深データベースを有しない領域から水深データベースを有する領域に進入した場合に、水深データベースに基づいて検出された現在位置に基づいて、慣性航法装置及び対地速度計の計測値に基づいて現在位置を補正する。
(もっと読む)
超音波探知装置
【課題】サイドローブによる偽像が表示されるのを抑制しながら、S/N比が低下するのを抑制することが可能な超音波探知装置を提供する。
【解決手段】水中探知装置50は、探知対象物で反射したエコーを含む受信信号を受信する複数の振動子1aと、所定の振動子1bが受信する受信信号を基準にして、所定の振動子1b以外の振動子1cが受信する受信信号を整相することにより、1つの受信ビーム信号を探知範囲内の走査角度毎に形成する受信ビーム信号形成部7と、受信ビーム信号の位相を走査角度毎に算出する位相算出部8と、位相の変化態様に基づいて各走査角度における受信信号がメインローブにより受信されたか否かを判定するとともに、メインローブにより受信されたと判定された受信信号のみを抽出するメインローブ受信信号抽出部9とを備えている。
(もっと読む)
ガスハイドレート位置探知用方法及び装置
【課題】ガスハイドレート堆積物を位置探査する改良した技術を提供する。
【解決手段】ガスハイドレートが垂直又はほぼ垂直な岩脈内に蓄積する場合があるという可能性を考慮する電磁探査又は地震探査のいずれかを使用してガスハイドレート堆積物を検知・特性付ける調査パラダイムを提供。ガスハイドレート安定ゾーンの存在、ガスハイドレート安定ゾーンの下側にガスの豊富な供給源が存在する(又は存在した)ことの表示、及びガスの高いフラックスをガスハイドレート安定ゾーン内へ輸送することの可能性表示等の地質学的要因を調査ストラテジーの一部として考慮することが可能である。ウォークアウェイ垂直地震プロファイル技術等の地震技術、又は垂直又はほぼ垂直な岩脈の存在を検知すべく適合された電磁探査を使用してデータを収集することが可能である。1つの例においては、データ処理及び採取技術をハイドレート岩脈を検知すべく適合することが可能である。
(もっと読む)
超音波フェイズドアレイ送受波器
【課題】 直交4ビームに加え、真下にビームが放射できる小型な超音波フェイズドアレイ送受波器を提供することを課題とする。
【解決手段】 超音波振動子21を行列配列し、配列された超音波振動子21を一定の規則に従いグループ化して回路を形成し駆動する。
(もっと読む)
海底検出方法および魚群探知装置
【課題】所定深度毎にその深度での海底検出レベルを演算し、この海底検出レベルを移動することにより海底を検出する方法および装置を提供することにある。また、この海底検出レベルを、海底反射を含む反射信号が横切る深度を記憶し、当該反射信号が検出レベルを上回る場合、当該反射信号の最大値と海底検出レベルとの差を所定の範囲とすることにより、安定して海底を検出する方法および装置を提供することにある。
【解決手段】海底を検出する方法において、所定深度毎に海底検出レベルを演算し、受信機で増幅検波した反射信号を所定深度毎に演算した海底検出レベルと比較し、比較の結果により演算した海底検出レベルを移動することを特徴とする。
(もっと読む)
水中探知装置および水中探知方法
【課題】 水底が検知されない場合であってもおおよその水深値を提示可能であり、ユーザの使い勝手を向上させることができる水中探知装置の提供。
【解決手段】 水中から得た情報を表示部2に表示させることができる魚群探知機1は、水中に探知信号を送出すると共に水中からの反射信号を受信する送受波器4と、反射信号に基づいて水底Pを検知すると共に水深を算出する水底検出部26と、水底検出部26によって水底Pが検知されたか否か判定する水底検知判定部32と、水底検知判定部32によって水底検出部26が水底Pを検知していないと判断された場合に、水底検出部26による水深の算出値の前回値を水深値として表示部2に表示させるための水深表示画像生成部30、描画プロセッサ44およびビデオメモリ46とを備える。
(もっと読む)
水中探知装置
【課題】尾引き信号に影響されることなく、水面近くの水中情報を正確に表示できる水中探知装置を提供する。
【解決手段】送信回路3から出力される送信信号に基づき、送受波器1から水中へ超音波を発射するとともに、水中で反射したエコーを送受波器1で受波して電気信号に変換し、この電気信号を処理して取り出されたエコー信号に基づいて水中情報を表示部8に表示する水中探知装置において、尾引き信号を除去してエコー信号のみを取り出すための尾引き信号除去部6を設け、表示部8の画面上で、表層魚群の映像が尾引き信号の映像で隠されずに明瞭に表示されるようにした。
(もっと読む)
水底情報更新方法及び装置
【課題】正確に水底の様子を三次元像として表示できるように、水底情報を修正或いはグレードアップして更新する水底情報更新方法及び装置を提供する。
【解決手段】水底情報格納手段5aが、現在位置や航行軌跡が重畳して表示される水面と該水面下の水底地形との三次元像を生成するための水底情報を格納している。水底情報は、所定間隔で予め定めた経緯度線の交点の水底高さ情報を有する。組合せ情報取得手段13aが、船舶が位置する水面下のターゲットの深度を含む探知情報と、探知時に測定した船舶の水面上の位置の経緯度を含む船舶位置情報との組合せ情報を順次取得し、組合せ情報格納手段5bに格納させる。水底高さ演算手段13bが、船舶位置情報の経緯度と、探知情報の水底部分の深度と、探知情報取得時の高さ位置とに基づいて、交点の水底高さを演算し、水底情報格納手段5aに格納されている対応する交点のそれ以前のものと入れ替え更新する。
(もっと読む)
1 - 14 / 14
[ Back to top ]