
Fターム[5J083BD10]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 走査(スキャン) (137) | ビームステアリング (69) | チルト(ティルト) (42)
Fターム[5J083BD10]の下位に属するFターム
Fターム[5J083BD10]に分類される特許
1 - 5 / 5
小さいフォームファクタの距離センサ
本明細書に開示する主題は、モバイルデバイスからリモートオブジェクトまでの距離、またはリモートオブジェクトのサイズを決定することに関する。
本発明は、回転可能なマイクロリフレクタを回転させてエネルギーをリモート表面に向ける段階であって、前記回転可能なマイクロリフレクタがモバイルデバイス中に配置され、前記回転させることが前記モバイルデバイスに関係する段階と、前記向けられたエネルギーの結果として生じる前記リモート表面からの反射エネルギーに少なくとも部分的に基づいて距離を測定する段階とを含む。  (もっと読む)
(もっと読む)
スキャニングソナー装置および追尾方法
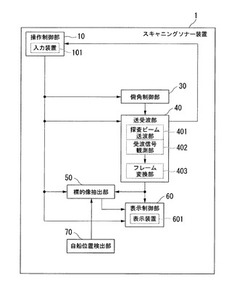
【課題】指定した追尾対象の追尾を継続することができるスキャニングソナー装置および追尾方法を提供する。
【解決手段】前回の観測結果において追尾対象とした像の重心の座標の絶対位置を基準位置とし、その周囲に追尾対象が含まれるように設定した領域を第1の観測領域として設定する第1の領域設定手順と、第1の領域設定手順によって設定された第1の観測領域内の基準位置に今回の観測結果による追尾対象の候補が存在するか否かが最初の判断である判断方法により次に追尾対象とする当該候補を設定する追尾対象設定手順と、を含む。
(もっと読む)
自動追尾スキャニングソナー

【目的】
ソナーにおいて送信波が標的に反射してから自船の探知部に到達するまでの間に、自船が移動してしまうことによる誤差を抑える。
【構成】
自動追尾スキャニングソナーにおいて、GPS及びコンパスの指示値の時系列データを保持するメモリを有し、過去の任意の時刻における自船の緯度、経度、船首方位を推定することができる船位置・方位計算部と、標的からの反射波を自船で受信した時刻における標的の緯度、経度、水深を算出する標的位置算出部とを備える事を特徴とするスキャニングソナー。
(もっと読む)
自動追尾スキャニングソナー
【課題】予測した魚群予測位置を捉えるように次回の水平スキャンにおける俯角θを制御するとともに、予測に誤差が含まれる場合にもより良い俯角に自動的に回復させることができる魚群追尾スキャニングソナーを提供すること。
【解決手段】標的である魚群を次回俯角を予測して予測追尾を行うとともに、魚群エコー強度総和が小さくなった場合には、現在の俯角から指定された所定の角度範囲内で受波ビームの俯角を振って追尾再開条件を満たす魚群エコー強度総和が得られる俯角を追尾再開時俯角として決定し、この追尾再開時俯角を基準として予測追尾を再スタートする。
(もっと読む)
水中探知装置
【課題】水中の様子を3次元的に容易かつ正確に認識できる水中探知装置を提供する。
【解決手段】水平モードおよび垂直モードでのスキャンにより得られたエコーのデータから3次元のエコー表示データを生成し、このエコー表示データに基づいて、表示画面17a上に3次元の魚群映像34を立体的に表示する。また、魚群映像34に加えて、水平モードでの傘形ビームのスキャン領域32、垂直モードでの扇形ビームのスキャン領域33、海底地形映像35、等深度線36などの3次元映像を立体的に表示する。
(もっと読む)
1 - 5 / 5
[ Back to top ]