
Fターム[5J083BE56]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 受信信号処理 (1,335) | フィルタ手段 (199) | デジタルフィルタ (14)
Fターム[5J083BE56]に分類される特許
1 - 14 / 14
フーリエ変換でのサンプル数を削減した、短時間信号のピークパワースペクトルを検出する方法及び装置
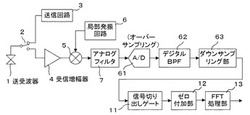
【課題】測定対象とする時間範囲の分解能を高めつつ周波数分解能を高め、しかもフーリエ変換におけるサンプリング周波数を低くしてサンプル数を少なくし、演算量を減らす。
【解決手段】受信信号を変調器5によって周波数変換し、アナログフィルタ7を介して周波数変換後の信号をA/D変換器61によりオーバーサンプリングでデジタル信号に変換し、デジタルBPF62により所望の周波数帯域幅Δfpに相当する成分を抽出し、抽出された信号をダウンサンプリング部63により最低周波数帯域にダウンサンプリングする。その後、信号切り出しゲート11により、ダウンサンプリング部63からのデジタルデータ列を所望の時間幅内で切り出し、周波数分解能を満たすようにゼロ付加部12によってゼロデータを付加し、ゼロデータが付加されたデジタルデータ列に対しFFT処理部13によって高速フーリエ変換を行う。
(もっと読む)
音源位置推定装置

【課題】到来時間差観測値に誤差がある場合にも、音源位置の推定誤差を小さくする。
【解決手段】海面1回反射波と海底1回反射波について別個に到来時間差の理論値を記憶しておき(209M)、受信した海面1回反射波及び海底1回反射波の、直接波に対する到来時間差と理論値との不一致度を別個に算出して、その和をコスト関数として(210)、音源位置の推定を行う(211)。直接波、海面1回反射波及び海底1回反射波の各々の、第1乃至第3の受波器(201、202、301)における到来時刻観測値の前後関係に基づいて、領域フィルタリングを行う。
(もっと読む)
位置検出装置、ウェアラブルセンサシステム及びプログラム
【課題】簡単、安価な構成で高精度に位置検出を行う。
【解決手段】3個の受信機までの3つの距離をベクトルとしたデータベースが予め登録された記憶部と、各受信機が出力する送信機と各受信機との間の距離に依存する距離情報に基づいてデータベースを探索して初期位置を用いて連立非線形方程式を解いて移動部分の位置を検出する検知処理部は、距離情報をフィルタリングしてデータベースの探索用距離情報を取得する第1のカルマンフィルタと、動的に調整されて移動部分の位置状態を推定する位置状態推定用の第2のカルマンフィルタを含むように構成する。
(もっと読む)
ドップラーレーダーシステム、ドップラーレーダー送信装置及び送信波最適化方法
【課題】本発明は、検出対象物体を容易にかつ精度よく検出するための相関処理に基づくドップラーレーダー送信装置を提供することを目的とする。
【解決手段】本発明は、ドップラーレーダー受信装置において自己相関が算出される検出対象物体からの反射波及び予め定められた参照波の周波数スペクトルが同一となるように、検出対象物体の移動速度のうち検出対象となる移動速度、自己の移動速度及びレーダー波の伝搬速度に基づいて、送信波の周波数スペクトルを調整する可変周波数発振部414及び読み出しアドレス生成部415と、送信波を検出対象物体に照射する送信波照射部と、を備えることを特徴とするドップラーレーダー送信装置である。
(もっと読む)
音情報表示装置、音情報表示方法およびプログラム
【課題】使用者が音源の位置とその音源から出る音の情報を直観的に判断可能とする。
【解決手段】集音情報(音信号)を得るためのマイクロホン101を透過型ヘッドマウントディスプレイの前面に配設する。信号処理部104は、マイクロホン101の集音情報に基づき、表示データを生成する。表示部105は、表示データに基づいて、音情報を、位置情報に対応した視覚映像内の位置に、この視覚映像に重ねて表示する。例えば、音源から出る音のレベル情報を、円の大きさで表示する。また、音源から出る音の周波数情報を、円に付される色で表示する。音源位置が視覚映像内にある場合、その音源位置あるいはその近傍に、音情報を表示する。一方、音源位置が表示面内から外れる場合、その音源位置に近い視覚映像の端部に、音情報を表示する。
(もっと読む)
位置検出装置、方法及びプログラム
【課題】必要な計算量が少なく、信頼性の高い測定結果を得ることができる位置検出装置を提供する。
【解決手段】装置は、各ランドマーク装置との距離の履歴に基づき、新たに測定した各ランドマーク装置との距離が異常であるか否かを判定する距離異常判定手段と、各ランドマーク装置の位置情報と、各ランドマーク装置との距離に基づき、カルマン・フィルタにより現在位置を求めて出力する位置判定手段とを備えており、位置判定手段は、新たに測定した第1のランドマーク装置との距離が異常である場合、新たに測定した第1のランドマーク装置との距離から、カルマン・フィルタによる、その予測値を引いた値が大きい程、小さくなる重み係数を算出し、算出した重み係数によりカルマン・ゲインを調整し、調整後のカルマン・ゲインにより現在位置を求める。
(もっと読む)
誤りのあるセンサ出力を特定するための方法及び装置
【課題】誤りのあるセンサ出力を特定するための方法及び装置を提供する。
【解決手段】誤りのあるセンサ出力を特定するための方法が提供される。本方法は、或る時間にわたって、センサから第1の複数のサンプルを得ることを含む。複数のサンプルの平均を求める。第1の複数のサンプルが得られた時刻より後の時刻においてセンサから第1のさらなるサンプルも受信する。第1のさらなるサンプルと平均との相違を求める。相違が或るしきい値よりも大きいときに、第1のさらなるサンプルを誤りがあると特定する。
(もっと読む)
目的物及び動作検出
例えば、人間の手のモーション、位置、若しくは構成は、夫々の時間フレームで複数の送信信号を送信するステップ、複数の受信信号を受信するステップ、送信信号及び受信信号を利用して複数のチャネルインパルス応答を判別するステップ、近接する時間フレームに対するインパルス応答を相互に近接させて、インパルス応答のマトリクスを規定するステップ、及び、モーション、位置、若しくは構成に対応するパターン(22)に対する上記マトリクスを分析するステップによって、認識され得る。  (もっと読む)
(もっと読む)
パーティクルフィルターに基づく音響センサーを利用した3次元空間での客体追跡方法
パーティクルフィルターに基づく音響センサーを利用した3次元空間での客体追跡方法が開示される。従来のベアリング−オンリートラッキングのためのパーティクル・フィルタリング・アルゴリズムを3次元空間で直接的に確張する代わりに、本発明は、3次元パーティクルフィルターを多様でなおかつ簡単な2次元パーティクルフィルターに再構成する。2次元パーティクルフィルターに対する再構成及び選択は、ノイズ環境での音響センサーの特性に基づく。本発明は、多重パーティクルフィルター結合で拡張されるが、本発明の剛健さと性能は、ラオの理論限界(Cramer−Rao Lower Bound:CRLB)を使って証明されうる。本発明は、計算の複雑性を減少させながらも、正確な3次元客体追跡を行うことができる長所がある。 (もっと読む)
デジタルレーダーまたはソナー装置
レーダーまたはソナーシステムは、レーダーシステムのアンテナまたはソナーシステムのトランスデューサが受信した信号を増幅し、次いで線形受信機による線形復調に晒す。増幅器と線形受信機との間には、アンチエイリアスフィルタおよびアナログ−デジタルコンバータが存在してもよい。このシステムはさらに、プロセッサにおいて実行されるネットワークスタックを有するデジタル信号プロセッサを有してもよい。当該プロセッサはさらに、システムが異なるレンジにて動作する場合、ネットワークインターフェイス・メディアアクセスコントローラを有してもよく、モジュレータは、パルス持続時間およびインターパルス間隔が異なる2つのパルスパターンのパルスを作り出してもよい。これらのパルスパターンは、2つのレーダー画像を形成するよう導入されるとともに用いられる。これら2つの画像は、より大きいインターパルス間隔よりも20倍未満の持続時間またはレーダーシステムの場合はアンテナ分解能時間の1/2未満の時間において取得されたデータから導き出される。1つ以上のルックアップテーブルが増幅器を制御するよう用いられてもよい。レーダーシステムは、レーダービデオのレベルを8つより多く含むデジタル出力を生成してもよい。 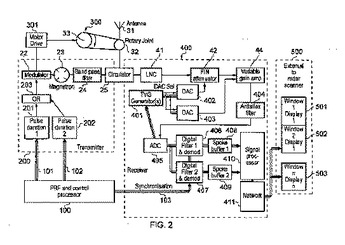 (もっと読む)
(もっと読む)
底質判別装置および底質判別方法
【課題】海底深度の深浅の影響を受けることなく海底の底質を判別することのできる底質判別装置および底質判別方法を提供する。
【解決手段】振動子1は海底深度に比例するパルス幅の送信パルスを海底に向けて送信する。このパルス幅は、深度算出部7が海底エコー信号から算出した海底深度に基づいて、送信パルス幅算出部8が算出する。振幅データ抽出部9では、海底エコー信号の所定範囲から海底深度に比例する時間間隔で振幅データが抽出される。この振幅データは、ゲイン補正部9でTVG処理され、正規化部12で正規化される。さらに、正規化後の振幅データの系列における複数個の区間(セグメント)ごとに特徴量が特徴量算出部13で算出され、この特徴量に基づいてニューラルネットワーク14が底質判別情報を生成する。底質判別情報は、判別対象の底質と複数の底質種別(岩や石など)との類似度をそれぞれ表す数値からなる。
(もっと読む)
2Dマトリクスアレイを用いてCWドップラー超音波を実施する方法およびその装置
【課題】2次元(2D)マトリクスアレイを用いた連続波(CW)ドップラー超音波方式およびその装置を提供する。
【解決手段】対象物体中に連続波(CW)ドップラー送信信号を送信する2Dマトリクス状の変換素子(204)を有する超音波プローブ(205)を含む超音波システムを提供する。CW送信信号(304)はディザー信号成分を含み、プローブ(205)は、CW送信信号に応答する当該物体からの超音波エコー信号を受信する。プローブ(205)は、これらの超音波エコー信号に基づいてアナログCW受信信号を生成する。アナログデジタル(A/D)変換器(111、222)が、アナログCW受信信号を所定のサンプリング周波数でデジタルCW受信信号に変換し、プロセッサ(112、228)が、CWドップラー撮像に関連してこのデジタルCW受信信号を処理する。
(もっと読む)
水中探知装置および信号処理回路
【課題】探知性能を劣化させることなく干渉波の影響を除去することが可能な水中探知装置を低コストで実現する。
【解決手段】バンドパス・フィルタ2の出力を増幅するアンプを、増幅率の異なる複数のアンプ31〜33で構成し、各アンプの出力をマルチプレクサ4で切り替えて、A/D変換器5で時分割的にサンプリングする。データ選択部8は、A/D変換器5の出力から、非飽和で、かつ、最も増幅率の大きいアンプに対応する出力を選択する。デジタル・プログラマブル・フィルタ9は、データ選択部8で選択された出力の所定帯域の信号成分を通過させる。フィルタ9の出力は振幅位相補償部12へ与えられ、ここで振幅の不連続および位相の不連続が補正される。
(もっと読む)
浸透、解像度及びフレームレートの自動制御を有する超音波画像診断システム
画像解像度とフレームレートとの間のバランス(Res/Speed)及び画像解像度と浸透との間のバランス(Pen/Gen/Res)が、画像内容に応じて自動的に調整される超音波画像診断システム及び方法が与えられる。動き検出器は、連続する画像間の相対的な動きを解析する。動き内容が相対的に高い場合、撮像パラメータは、相対的に大きいフレームレート及び低減された解像度を優先して変更される。低い動き内容は、反対の調整をもたらす。更に、連続する画像間の電子ノイズが計算され、遠距離場における相対的に高いノイズ内容(低い相関関係)は、結果的に、送信周波数を下げることによって浸透に対する調整をもたらす。相対的に低いノイズ内容は、高められる解像度を優先する調整をもたらす。  (もっと読む)
(もっと読む)
1 - 14 / 14
[ Back to top ]