
Fターム[5J083EA06]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 表示方法 (282) | 信号の除去又は付加 (22) | 不要画像を除去するもの (14)
Fターム[5J083EA06]に分類される特許
1 - 14 / 14
超音波診断装置
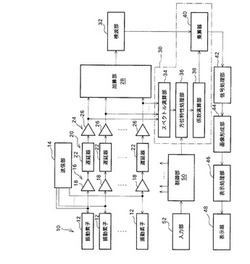
【課題】超音波診断装置において、整相加算後の信号に含まれる不要波成分の抑圧を適切に行う。特に過剰な抑圧がなされないようにする。
【解決手段】スペクトル演算部34は、整相処理後(遅延処理後)かつ加算処理前の受信信号列に対して、素子配列方向に沿って信号レベルをサンプリングして複数のサンプリング値からなる波形を得て、それに対する周波数解析により方位スペクトルを取得する。方位特性処理部36は、方位スペクトルに対して、前記整相処理及び加算処理により生じる振動素子列の方位特性を用いた重み付け処理を適用することにより、重み付け後の方位スペクトルを生成する。係数演算部38は、重み付け後の方位スペクトルに基づいて不要波成分抑圧用の係数を演算する。乗算器40は、加算部28の出力信号に対して係数を乗算することにより不要波成分を抑圧する。乗算に代えて減算を利用することも可能である。
(もっと読む)
狭帯域信号検出装置及び狭帯域信号検出方法

【課題】受信機から入力される狭帯域信号から、自己雑音を含まない信号を検出すること。
【解決手段】入力信号に対して、所定のサンプル時刻tの時間毎に得られる方位mのビーム、周波数nのビンにおける信号強度Xt(m、n)に基づいて、方位及び周波数方向にピークを検出するとともに、前記ピークの時間的なつながりであるラインのレベルに基づいて、ステータスを「検出」として判定するステータス判定手段4を有する狭帯域信号検出装置において、前記ラインが予め定めた条件に適合する場合に、前記ステータス判定手段4の判定結果から自己雑音24に関するラインを除去する不要信号除去手段を有する。
(もっと読む)
超音波探知装置
【課題】振動子の数が少なくても、グレーティングローブによる偽像を除去して探知対象物の検出精度を向上させることが可能な超音波探知装置を提供する。
【解決手段】受信ビーム信号形成部9a,9bで形成された2つの受信ビーム信号の位相差を、位相差算出部11で走査角度ごとに算出し、メインローブ受信信号検出部12は、位相差算出部11で算出された位相差の変化態様に基づいて、各走査角度における受信ビーム信号がメインローブで受信された信号かグレーティングローブで受信された信号かを判定し、メインローブで受信された信号に基づく探知対象物の画像を表示し、グレーティングローブで受信された信号に基づく探知対象物の画像を表示しないように制御する。
(もっと読む)
様々な範囲にある物体の位置推定
初期信号(20)を与え、時間シフト関数を初期信号(20)へ適用して送信信号(36)を生成し、送信信号(36)を送信し、受信信号を受信し、受信信号が初期信号によって生成されたかのように、受信信号からインパルス応答を計算し、インパルス応答を使用して、異なる距離範囲にある物体(6)からの反射による受信信号を弁別することによって、伝送路のインパルス応答を推定する。 (もっと読む)
アクティブソーナー装置およびアクティブソーナー装置による残響除去方法
【課題】オペレーターにとって簡単な方法で、不要なエコー信号を除去する範囲を指定する。
【解決手段】本発明のアクティブソーナー装置は、送波器と、前記送波器から送波された音波の反射波を受波信号として受波する受波器と、を有してなるアクティブソーナー装置であって、地図上に作図された、前記音波の反射が起きやすい地形が海底に存在する海域を、検出除去海域として設定する作図処理部と、前記受波器で受波された受波信号からエコー信号を検出し、検出したエコー信号のうち、前記検出除去海域にて反射したエコー信号を残響として除去する残響除去部と、を有することを特徴とする。
(もっと読む)
超音波探知装置および超音波探知方法
【課題】サイドローブによる偽像が表示されない超音波探知装置および超音波探知方法を提供する。
【解決手段】受信ビーム形成部9L、9Rは、振動子2L、2Rなどの受信信号から左受信ビーム信号、右受信ビーム信号を形成する。両受信ビームでスプリットビームが構成される。位相差算出部11はスプリットビームの位相差を算出する。メインローブ信号抽出部12は、1走査分の各走査角度での位相差データから位相差のゼロクロス点を探し、ゼロクロス点の前後で位相が±180度変化するときの走査角度幅を算出する。さらに、この走査角度幅とゼロクロス点における既知のメインローブ角度幅との比率に基づいて、受信信号がメインローブまたはサイドローブのいずれで受信されたかを判定し、サイドローブで受信されたと判定した場合、当該受信信号に係る画像を表示しないようにする。
(もっと読む)
パルスドプラ計測装置、その方法及びそのプログラム
【課題】対象物の速度を超音波パルスの反射波の位相差により計測する際に、位相差における位相の折り返しによる誤計測を防止することを可能にしたパルスドプラ計測装置を提供する。
【解決手段】パルスドプラ計測装置1は、反射波から、周波数毎の位相を検出するフーリエ変換手段31と、周波数毎の位相について位相差を演算する位相差演算手段33と、その位相差に対して、予め定めた異なる複数の位相修正パターンで2πの整数倍の位相を加算又は減算する位相差修正手段341と、周波数と当該周波数における位相差とを座標点とする座標系において、位相修正パターン毎に周波数毎の座標点を直線に近似することで、その直線の傾きとその誤差とを演算する直線近似手段342と、その誤差が最小となる直線の傾きを、移動速度に対応する位相差の傾きとして選択する速度特定手段36と、を備えることを特徴とする。
(もっと読む)
物体検知装置
【課題】物体検知装置において、受波素子が送波器から直接に受波した超音波を受波信号として出力するのを、確実に効率よく防止し、SN比を上げて誤検出を減少させる。
【解決手段】検知領域に超音波SWを送波する送波器1と、検知領域にある被測定物体2で反射された超音波RW(超音波SWの反射波)を受波してその超音波RWを電気信号である受波信号に変換する複数個の受波素子3と、受波素子3が送波器1から直接に受波した超音波DWを受波信号として出力することを防止する消音手段4と、受波素子3の受波信号に基づいて超音波SWが送波されてから受波されるまでの時間に対応する被測定物体2までの距離を求めると共に各受波素子3における各受波信号の時間差に対応する被測定物体2の方位を求めて被測定物体2を検知する検知部5と、を備える。消音手段4は、送波器1から送波される超音波SWとは逆位相の電気信号を検知部5に出力する。
(もっと読む)
車両用障害物検知装置および車両用障害物検知方法
【課題】 ノイズ成分が一定でない場合であっても確実な障害物検知を可能にするとともに、障害物検知の拘束処理を可能とする車両用障害物検知装置および車両用障害物検知方法を提供すること。
【解決手段】 測定対象物に対して送信波を発信し、送信波が測定対象物に反射して戻ってくる反射波を受信する超音波センサ10と、受信器による受信波をウェーブレット変換を用いて多重解像度解析して前記受信波の周波数バンドを算出し(ステップS33)、ウェーブレット変換においてノイズを除去するレベルを可変にして(ステップS31,S34)、反射波に基づいて障害物を検知するコントローラ40とを備え、受信波から前記ノイズを除去して障害物検知を行うようにした。
(もっと読む)
物体検出装置および物体検出方法
【課題】 物体の位置を精度よく検出することが可能な物体検出装置を提供する。
【解決手段】 物体検出装置10は、超音波を射出し、該超音波の反射状態から物体との距離を検出するソナー50を備え、このソナー50を移動させつつ物体との距離を繰り返し検出することによって、物体の位置や輪郭を検出する装置である。この物体検出装置10は、さらに、ソナー50の移動距離を検出する移動距離検出部41と、ソナー50の移動距離と検出距離の変化量とから求められる検出結果間の距離がソナー50の移動距離に応じて設定される連続性判断基準値内に収まっているか否かを判断することにより、検出結果の連続性を判断する連続性判断部42とを備える。この連続性判断部42は、物体との距離が検出され始めてからのソナー50の移動距離が予め設定されている所定距離を越えた場合に、上記連続性判断基準値をより大きな値に持ち替える。
(もっと読む)
レーダ装置および類似装置
【課題】
複数のレーダアンテナから得られる探知データを正確に合成して表示するレーダ装置を提供する。
【解決手段】
レーダアンテナ11から得られた探知データは相関処理部91Aで相関処理される。レーダアンテナ21から得られた探知データは相関処理部91Bで相関処理される。レーダアンテナ21からの相関処理データと同じアドレスを指定するマスク画像は、マスク領域発生部32により設定されてマスク用画像メモリ62に書き込まれる。これら相関処理部91A,91Bの各相関処理データはレーダアンテナ11,21の設置位置に応じたアドレス設定がされており、相関処理部91Bの処理用画像メモリ902B、マスク用画像メモリ62は共通のアドレスが設定されている。表示用画像メモリ61は、マスクデータに従って入力された相関処理データを表示画面に設定されたアドレスに従って記憶するとともに表示器10に出力する。
(もっと読む)
乗員保護装置、乗員保護方法および乗員保護装置付き車両
【課題】 衝突対象に応じた乗員保護を行うことが可能な乗員保護装置を提供する。
【解決手段】 乗員保護装置1は、車外に向けて超音波を発信し、車外対象物にて反射して戻ってくる反射波を受信する。そして、乗員保護装置1は、受信した反射波の特性から、車外対象物の種類を判別する。このとき、乗員保護装置1は、反射波の波形の積分値及びひずみの少なくとも2つから、車外対象物の種類を判別する。判別後、乗員保護装置1は、車外対象物の種類に応じて、乗員を拘束すべきか否かを判断する。
(もっと読む)
移動体制御装置及び方法
【課題】音源の方向を基準とする移動体の方向に関する情報と移動体の走行情報とだけを利用して移動体を高精度に制御する移動体制御装置を提供する。
【解決手段】本発明による移動体制御装置は、移動体(40)の軌道上の二カ所(P1、P2)で、音源(44)の方向(50、52)を基準として移動体(40)の方向(θ1"、 θ2")を推定し、その二カ所(P1、P2)間の走行距離(l)と、その二カ所(P1、P2)で推定された方向(θ1"、 θ2")とを利用して音源(44)と移動体(40)と間の距離(l2)を決定する。
(もっと読む)
改善されたソーダーよる下層大気の観測
【解決手段】下層大気を音響的に観測するための方法及びシステムは、音響チャープを送信すること、及び返されたエコーと干渉をウェーブレット及び整合フィルタ技術を用いて処理することを含む。1台の送信機と4台の受信機を使用することができ、受信機はコンパス主要点上に送信機から等距離に配置されている。N、S、E、W入力がデジタル化され、直接信号及び周囲ノイズ信号を減衰させるために送信機チャープ信号(R又はD)と共にウェーブレットフィルタ(50)に入力される。次いで、干渉を減衰させた信号は、位相及び振幅出力(54、56)を抽出するために整合フィルタ(52)で処理され、位相出力はアンラップされる(70)。N及びS位相信号並びにE及びW位相信号は別々に差別化され(74、80)、その結果が風速及び風向を計算(86、92)するために使用される。抽出された振幅信号(56)は第2のウェーブレットフィルタ(58)を通され、レンジゲート(96)内の風速及び風向データと共に記憶される前にエコークラッターを除去する。  (もっと読む)
(もっと読む)
1 - 14 / 14
[ Back to top ]