
Fターム[5J084AA13]の内容
光レーダ方式及びその細部 (24,468) | 測定内容 (2,871) | 物体の形状、凸凹 (151)
Fターム[5J084AA13]に分類される特許
81 - 100 / 151
測距装置および測距方法並びにプログラム
【課題】精度良くかつ高速に測距を行うことができるようにする。
【解決手段】測距光源16が、所定周期にて強度が時間的に変化するように変調された第1の測距光、および所定周期にて強度が一定のパルス波状に変調された第2の測距光を切換可能に発光する。第1の測距光を発光し、第1の測距光の変調周期における位相が異なる複数の受光期間において複数の第1の受光信号を取得し、複数の第1の受光信号に基づいて、第1の測距光と第1の測距光の反射光との位相差を算出し、位相差に基づいて第2の測距光の位相を第1の測距光とは異なるように変更して第2の測距光を発光する。第2の測距光の変調周期における位相差に応じた複数の受光期間において複数の第2の受光信号を取得し、複数の第1の受光信号に基づいて、距離情報の算出に使用する第2の受光信号を選択する。距離画像生成部31が、選択した第2の事項信号を用いて距離情報を算出する。
(もっと読む)
物体検出装置

【課題】物体の端部を高精度に特定することができる物体検出装置を提供する。
【解決手段】自車両の前方を走行する他車両の位置情報を一定の周期で繰り返して検出するLIDAR2と、自車両の前方を撮像して自車両の前方を走行する他車両を撮像するカメラ3と、LIDAR2から送信されるLIDAR点列と、カメラ3から送信される撮像画像撮像画像とにより、自車両の前方を走行する他車両の端部を特定して、この他車両の中心位置及び向きを検出するECU4とを備えている。そして、このECU4は、LIDAR点列に近似された物体検出直線αと、撮像画像における矩形領域の左右端の方位直線β1,β2との交点x1,x2を、他車両21の左右端部として特定する。
(もっと読む)
形状測定装置
【課題】スリット光を用いた三角測量において、被検物によってスリット光が正反射された場合においても、被検物の形状を部分的に欠落することなく測定する。
【解決手段】
この3次元形状測定装置10は、第1投光部11、第2投光部12、撮像部13、および画像処理部14を備える。第1投光部11と第2投光部12とは、異なる照射角で被検物1を照射するので、一方からのスリット光が正反射したとしても、それと同時に他方からのスリット光が正反射することはない。よって、正反射が生じていない方の投光部の照射光の反射光を撮像した画像を採用し、被検物1の3次元形状を解析する。本発明は、スリット光を用いた三角測量により被検物の3次元形状を測定する測定装置に採用することができる。
(もっと読む)
駐車支援方法
【課題】 後退による駐車を行う際、駐車位置の事前計測を行わずに、駐車体勢の時点で駐車位置の検出と軌道の生成を行い、駐車位置へ誘導する駐車支援方法を提供することを課題とする。
【解決手段】 車両1の後方に設置したレーザ測定器11を用いて、車両後方にある駐車車両の輪郭を計測し、レーザ測定器11にて計測できない部分は計測結果に略矩形の形状を重ねることにより輪郭を補い、駐車車両11、12、及び隣接する仮駐車目標位置3を求める。次に車両1の現在位置と仮駐車目標位置3を結ぶ軌道4を求め、車両1を自動的に誘導する。後退駐車中も計測を繰り返し行い、駐車車両11、12、及び軌道4を適宜補正し、最終的に駐車位置5に車両1を誘導する駐車支援方法を提供する。
(もっと読む)
ファイル生成装置および方法、ファイル表示装置および方法並びにプログラム
【課題】距離画像を表示する際に、距離画像に関連する輝度画像あるいは高解像度の距離画像の存在の有無を容易に確認できるようにする。
【解決手段】第1の距離画像生成部31が、被写体までの距離を表す第1の距離画像S1を生成する。第2の距離画像生成部32が、第1の距離画像S1よりも高解像度の第2の距離画像S2を所定条件下において生成する。ファイル生成部24が、第1の距離画像S1および第2の距離画像S2から1つの画像ファイルF0を生成するに際し、第2の距離画像S2の有無を表す付帯情報を付与して画像ファイルF0を生成する。
(もっと読む)
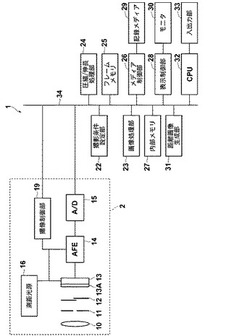
測距装置および測距方法並びにプログラム
【課題】距離画像および輝度画像の双方を生成するに際し、高解像度の輝度画像を生成できるようにする。
【解決手段】測距光照射部3が、所定周期にて強度変調された測距光を被写体に照射し、複数の受光素子が配列されたCCD13が被写体による測距光の反射光を受光し、受光光量に応じた信号を出力する。この際、撮像制御部19が、所定数の受光素子からなる受光素子単位にて、測距光の変調周期における互いに異なる複数の位相において反射光をそれぞれ受光して、複数の位相毎に信号を取得するようCCD13を制御する。距離画像生成部31が、複数の位相毎の信号に基づいて、受光素子単位にて被写体までの距離を表す距離情報を算出し、距離情報を各画素の情報とする距離画像を生成する。輝度画像生成部32が、複数の位相毎の信号に基づいて、受光素子単位にて被写体の輝度を表す輝度情報を複数算出し、各輝度情報を各画素の情報とする輝度画像を生成する。
(もっと読む)
測距装置および測距方法並びにプログラム
【課題】高いフレームレートにて距離画像を生成できるようにする。
【解決手段】測距光照射部3が所定周期にて強度変調された測距光を被写体に照射し、複数の受光素子が配列されたCCD13が測距光の反射光を受光し受光光量に応じた信号を出力する。この際測距光の変調周期における互いに異なる複数の位相の数に対応する数の受光素子からなる受光素子単位を設定し、第1の基準変調周期において受光素子単位に含まれる受光素子により複数の位相の反射光を受光し、複数の位相数に対応する数の第1の基準変調周期からなる第2の基準変調周期において、各受光素子により受光される反射光の位相を順次切り替えて、各受光素子により複数の位相のすべての反射光を受光して、複数の位相のすべての受光信号を取得する。第1の距離画像生成部31が受光素子単位毎に第1の距離画像S1を生成し、第2の距離画像生成部32が受光素子毎に第2の距離画像S2を生成する。
(もっと読む)
立体撮像装置および立体撮像装置の制御方法並びにプログラム
【課題】ステレオマッチングにより距離画像を生成する際に、立体撮像装置から被写体までの距離が大きくても、距離画像を精度良く生成する。
【解決手段】第1の距離画像生成部30において、撮像部2Aが取得した距離画像用のデータから距離画像D1を生成する。基線長変更手段38が、第1の距離画像に基づいて被写体までの距離である被写体距離を算出し、被写体距離が大きいほど撮像部2B,2C間の距離である基線長を大きくするよう変更する。基線長の変更後、撮像部2B,2Cが取得した基準画像および参照画像からステレオマッチング部31が対応点を検出し、第2の距離画像生成部32が距離画像D2を生成する。
(もっと読む)
距離計測方法および装置、ならびに距離計測装置を備えた車両
【課題】計測対象空間内の被検物の距離情報、例えばその被検物が計測装置からある特定の距離だけ離れているかどうかを高速に計測する。
【解決手段】投光器1L,1Rは、計測対象空間内に照射光L11〜L13およびL21〜L23を交差するように、かつそれらの交点からの反射光のパルス間隔が交点までの距離に対応する時間間隔となるようにパルス光を投光する。撮像素子2は、計測対象空間内の被検物からの反射光を検出してその被検物の像を複数回撮像する。同期検波部33Aは、複数枚の画像における各画素から出力される時系列画素信号の中から、計測対象である交点までの距離に対応するパルス間隔を持つ時系列画素信号を検出する。
(もっと読む)
立体撮像装置および立体撮像装置の制御方法並びにプログラム
【課題】隠れ点を考慮して簡易に精度良くマッピング画像を取得できるようにする。
【解決手段】同期制御部20により距離画像を取得するための撮像部2Aおよび撮像部2Bの駆動を同期させて距離画像および2次元画像を取得する。対応関係算出部30により、距離画像上における画素と、2次元画像上における画素との対応関係を算出する。この際、隠れ点検出部31において、撮像部2Aからは臨むことができるが撮像部2Bからは臨むことができない被写体上の隠れ点を距離画像および2次元画像上において検出する。マッピング部32により、対応関係に基づいて、隠れ点を視認可能に2次元画像を距離画像にマッピングしてマッピング画像を生成する。
(もっと読む)
距離画像装置及び撮像装置
【課題】開口率を大幅に改善し、高精度な距離画像を生成する。
【解決手段】撮像装置を構成するための半導体基板25内に画素ごとにpn接合フォトダイオード(PD)14を設ける。PD14のn型領域24の表面に、オーバーフローバリア(OFB)17を設け、OFB18の表層にオーバーフロードレイン(OFD)18を形成する。OFB17及びOFD18は、受光期間の開始時にPD14内の信号電荷(電子)を破棄するための電荷破棄部である。この電荷破棄部と同じく、PD14より半導体基板25の表層側の領域に、電荷転送チャネル23a,23bにより構成される電荷蓄積部を設ける。電荷蓄積部は、1画素につき複数設けられ、照射光の変調周期に同期した複数のタイミングでPD14から読み出した信号電荷を蓄積するものである。これにより、半導体基板25の裏面側全体が受光領域となり、開口率がほぼ100%となる。
(もっと読む)
撮像装置、立体画像再生装置及び立体画像再生プログラム
【課題】撮影後に多視点画像を立体表示する場合においても、編集を容易に行うことができる多視点画像を撮影することができる。
【解決手段】複数の撮像手段により多視点画像を撮影し、多視点画像を立体表示するときの基準となる面である基準面の距離を取得し、全撮影範囲内の被写体の距離を所定の画素単位で測距してなる距離画像を取得し、多視点画像と、基準面の距離を示す情報と、距離画像とを関連付けて記録する。これにより、撮影された被写体像内の基準面上の領域を識別する表示をすることができる。なお、撮影、記録後に、基準面を示す情報と距離画像とに基づいて、多視点画像内の基準面上にある被写体の領域を抽出し、抽出した領域にマーキングデータを合成することで、変更後の基準面の領域を識別可能に表示しながら、基準面の距離を変更することもできる。
(もっと読む)
計測装置およびその計測方法
【課題】被検物の全体3次元形状を測定する計測装置、およびその計測方法を提供することを目的とする。
【解決手段】本発明に係る計測装置1は、被検物170を載置する支持ステージ151と、支持ステージ上に載置された被検物の3次元形状を光学的手法を用いて非接触で測定する測定部2とを備えており、測定部は支持ステージに対して測定方向が可変となるように構成され、また、予め設定した所定の位置関係で支持ステージ上に載置された少なくとも3つ以上の測定基準体160、161および162と、測定部により複数の測定方向から支持ステージ上に載置された測定基準体および被検物を測定し、得られた測定データから測定基準体の測定位置を合成基準として複数の測定方向からの被検物の測定データを合成することにより、被検物の全体3次元形状を求める合成部とを有している。
(もっと読む)
測距装置及び測距方法
【課題】ノイズの影響を受けにくく、撮像素子を駆動するための回路も簡単にすることができ、CPUへの負荷を低減することができる測距装置を提供する。
【解決手段】第1測距装置10Aは、強度変調され、且つ、開始位相がそれぞれ異なる第1変調光12A〜第4変調光12Dをシリーズに出射する発光手段14と、第1変調光12A〜第4変調光12Dにより照射された被検出物16からの反射光18を受光する受光手段20と、第1変調光12A〜第4変調光12Dと反射光18の位相差から被検出物16までの距離を算出する演算手段22とを有する。発光手段14は、発光部26と、発光部26から出射される光を強度変調して第1変調光12A〜第4変調光12Dとして出射させる発光制御部28とを有し、さらに、発光制御部28は、第1変調光12A〜第4変調光12Dの各開始位相を制御する開始位相制御部64を有する。受光手段20は、照射開始時を基準として一定周期ごとに設定された露光期間において反射光18の光量をサンプリングする。
(もっと読む)
測距装置及び測距方法
【課題】被検出物までの距離が遠い場合等において、専用のキャリブレーションを行うことなく、被検出物までの距離を正確に測定できるようにする。
【解決手段】第1測距装置10Aは、複数の発光開始タイミングにおいてそれぞれ強度変調された変調光12を出射する発光手段14と、変調光12により照射された被検出物16からの反射光18を受光する受光手段20と、変調光12と反射光18の位相差から被検出物16までの距離を算出する演算手段22とを有し、受光手段20は、発光開始タイミングの回数と変調光12の波長に基づいて発光開始タイミングから反射光18の受光開始時点までの時間的長さをそれぞれ変化させるタイミング制御部68を有する。
(もっと読む)
レーザレーダ装置とその制御方法
【課題】数値演算の負荷の増加や所要計測時間の増加を最小限に抑えながら、遠距離にある計測対象物の空間分解能を高めることができ、或いは近距離であっても特定の対象物の空間分解能を従来以上に高めることができるレーザレーダ装置とその制御方法を提供する。
【解決手段】レーザ発振器12、投光器14、受光器16、距離演算器18及び制御器20を備え、距離演算器18で得られた距離データ9に基づき、計測領域に向けて走査するレーザ光(投光レーザ光2)の走査ピッチを変更する。投光レーザ光2の走査ピッチの変更により、所定の計測領域に向けて空間的に走査される投光レーザ光2の角度ピッチが変更される。
(もっと読む)
監視装置
【課題】 小型の装置により、鮮明な監視画面を得ることのできる監視装置を提供することを目的とする。
【解決手段】 レーザレーダ制御部2内の画像処理装置25が、ICCDカメラヘッド123から出力された画像信号をCCDカメラの1フレーム期間に渡って蓄積し、蓄積した複数の画像信号を重畳して監視画像を作成することにより、輝度の高い監視画像を得る。
(もっと読む)
測距装置及び測距方法
【課題】ノイズの影響を受けにくく、撮像素子を駆動するための回路も簡単にすることができ、CPUへの負荷を低減することができる測距装置を提供する。
【解決手段】発光部26と、発光部26から出射される光を強度変調して第1変調光12A〜第4変調光12Dとして出射させる発光制御部28と、第1変調光12A〜第4変調光12Dの基準時から照射開始時までの時間的長さを制御する開始時間制御部64とを有する発光手段14と、第1変調光12A〜第4変調光12Dにより照射された被検出物16からの反射光18を受光する受光手段20と、第1変調光12A〜第4変調光12Dと反射光18の位相差から被検出物16までの距離を算出する演算手段22とを有する。受光手段20は、照射開始時を基準として一定周期ごとに設定された露光期間において反射光18の光量をサンプリングする。
(もっと読む)
三次元形状計測装置及び三次元形状計測方法
【課題】物体の三次元形状を迅速に精度良く計測する。
【解決手段】物体2に正弦波状の光パターンを投射するとともに、光パターンが投射された物体2を撮影し、その撮影画像に基づいて物体2の三次元形状を計測する三次元形状計測装置であって、短波長の光パターン20及び長波長の光パターン30の各々を物体2に投射するプロジェクタ3と、短波長の光パターン20及び長波長の光パターン30が投射された物体2を撮影するカメラ4と、カメラ4で撮影された画像に基づいて、短波長の光パターン20の相対位相及び長波長の光パターン30の相対位相を算出し、算出した長波長の光パターン30の相対位相に基づいて、短波長の光パターン20の相対位相と絶対位相との間のオフセット値を求め、該オフセット値と、算出した短波長の光パターン20の相対位相とに基づいて、物体2までの距離Zを求める制御部5とを備えることを特徴とする。
(もっと読む)
3次元環境計測装置及びそれを備えた移動ロボット
【課題】広範囲な計測をするとともに、必要に応じて測定点の粗密を調整して適切な密度で、さらには、移動しながら計測する場合でも、移動によるずれをなくして誤認識せずに3次元形状を計測することができるようにする。
【解決手段】レーザで平面状にスキャンして環境の2次元形状を取得するセンサ1と、センサ1をチルト回転させるモータ2と、モータ2の回転速度を制御するモータ制御装置3とを備えた3次元環境計測装置において、操作者によって予め入力される、センサ1のスキャン速度に対するセンサのチルト動作の回転速度の比に応じてモータ2の回転速度を変更する回転速度指令を生成し、該回転速度指令をモータ制御装置3へ与える指令生成装置4を備えた3次元環境計測装置とそれを搭載した移動ロボットとした。
(もっと読む)
81 - 100 / 151
[ Back to top ]