
Fターム[5J084AA13]の内容
光レーダ方式及びその細部 (24,468) | 測定内容 (2,871) | 物体の形状、凸凹 (151)
Fターム[5J084AA13]に分類される特許
41 - 60 / 151
光波距離測定装置

【課題】測定対象物の画像データと画素毎の距離データが得られる様にした光波距離測定装置を提供する。
【解決手段】測距光を変調して測定対象物に照射する投光部1と、測定対象物からの反射測距光を受光する受光部6と、受光信号を記憶する信号処理部7と、前記受光部及び前記信号処理部を制御して受光信号を取得する信号処理制御9と、受光信号に基づき測定対象物迄の距離を演算する演算処理器8とを有し、前記受光部は、所定の配列で配置された複数の画素11と、各画素からの受光信号を蓄積し、1周期を所定数分割した内の1分割分の受光量を検出し、検出結果を時系列に出力する出力部15とを有し、前記信号処理制御部は、一周波毎に受光量を検出する分割部分の位置を順次変更し、前記演算処理器は、少なくとも1周期分の検出結果に基づき一周波分の波形を演算すると共に、照射した前記測距光に対する前記波形の位相差を求め、該位相差より距離を演算する。
(もっと読む)
移動ロボットの走行領域判別装置及び走行領域判別方法

【課題】移動ロボットの前方領域を走行可能領域及び走行不能領域に正しく区分けし得るうえ、隣接して存在する走行可能領域間の境界部分の段差をも検出して走行の可否を判定し得る走行領域判定装置及び方法を提供する。
【解決手段】移動ロボットRの前方側を走行可能及び走行不能の各領域に分ける処理部30では、外界計測部10のレーザレンジファインダ11を用いて取得した移動ロボットRの前方側プロファイルデータの幾何的特徴量から領域の分割を行い、分割後の領域内の計測点データから勾配や表面粗さなどの幾何的特徴量を評価して、分割した領域を走行可能領域及び走行不能領域に区分けし、加えて、区分けによる走行可能領域G1,G2が隣接している場合、走行可能領域G1,G2間の境界部分Nのデータから、段差Hなどの幾何的特徴量を評価することで、移動ロボットRの境界部分Nでの走行の可否を判定処理する。
(もっと読む)
三次元画像を形成するための識別専用オプトロニックシステムおよび方法
【課題】三次元画像を形成するための識別専用オプトロニックシステム及び方法を提供する。
【解決手段】光センサと、通信手段21、22と、コンピュータ処理手段1とを含み、センサが捕捉した画像から三次元の物体を再構成し、当該再構成に基づいて物体を識別可能にする、物体を識別するためのオプトロニックシステムであって、光センサが、物体5周囲の何通りかの観測角61、62で捕捉された、物体5の表面で反射される電磁放射の輝度レベルを表す物体の画像を記録でき、通信手段21、22が、物体表面で反射される電磁放射の輝度レベルを表す前記物体の画像を処理すべく構成された断層撮影機能によって、三次元で物体を再構成できるよう、前記画像をコンピュータ処理手段1に送信できる。
(もっと読む)
光電変換素子、受光装置、受光システム及び測距装置
【課題】光電変換によって得られた光電子を所望の領域に高速に移動させ、集積させるようにして、測距装置や受光システム等を実現できるようにする。
【解決手段】光を検知して光電子に変換する第1光電変換素子10Aは、半導体基体12上に絶縁体を介して形成された第1電極16aを有する1つの第1MOSダイオード18aと、半導体基体12上に絶縁体を介して形成された第2電極16bを有する複数の第2MOSダイオード18bとを有する。第1MOSダイオード18aの第1電極16aは、上面から見たとき、1つの電極部位20から複数の枝分かれ部位22に分岐配列されたくし歯形状を有し、第2MOSダイオード18bの各第2電極16bは、上面から見たとき、第1電極16aとは分離され、且つ、第1電極16aにおける複数の枝分かれ部位22間にそれぞれ入れ子状に配置されている。
(もっと読む)
距離画像取得装置
【課題】ファイババンドル型イメージガイドの屈曲に起因して距離画像の各画素間に相対的な誤差が生じることを抑制することが可能な距離画像取得装置を提供する。
【解決手段】距離画像取得装置1は、可撓性外装体3と、光源21と、第1光ガイドファイバ7と、第2光ガイドファイバ9と、反射光を受光し、基端面11Tから出射させるファイババンドル型イメージガイド11と、光源21の出射光の光行路を変更し、自己校正光21Eとしてファイババンドル型イメージガイド11に入射させる光行路変更部材15と、第1光伝搬遅延時間に対応する第1出力信号を出力する距離画像センサ23と、測定対象物33の距離画像を演算する信号処理部25とを備える。信号処理部25は、自己校正光21Eを受光した距離画像センサ23の第2出力信号に基づき、第2光伝搬遅延時間を演算し、これに基づき複数の画素ごとに距離画像を校正する。
(もっと読む)
小さいフォームファクタの距離センサ
本明細書に開示する主題は、モバイルデバイスからリモートオブジェクトまでの距離、またはリモートオブジェクトのサイズを決定することに関する。
本発明は、回転可能なマイクロリフレクタを回転させてエネルギーをリモート表面に向ける段階であって、前記回転可能なマイクロリフレクタがモバイルデバイス中に配置され、前記回転させることが前記モバイルデバイスに関係する段階と、前記向けられたエネルギーの結果として生じる前記リモート表面からの反射エネルギーに少なくとも部分的に基づいて距離を測定する段階とを含む。 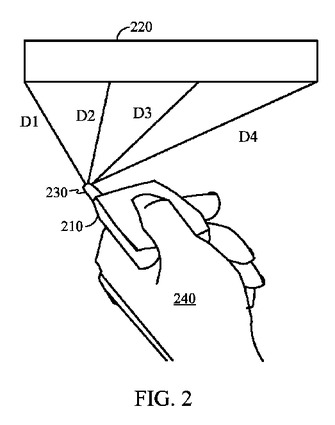 (もっと読む)
(もっと読む)
レーザ照準機構
レーザトラッカまたはレーザスキャナとともに使用するための照準デバイスは、トラッカまたはスキャナ制御システムとトラッカまたはスキャナ装置とを含むとよい。トラッカ装置は、レーザを操作する機構へトルクを印加するように構成された複数のモータと、機構の角度位置についてのフィードバック情報をトラッカ制御システムへ送るように構成された複数の角度エンコーダとを含むとよい。トラッカまたはスキャナ制御システムは、照準デバイスが手動調節モードで作動している時にトラッカまたはスキャナ制御システムが複数のモータを制御してユーザにより引き起こされた移動の方向と反対に機構へトルクを付与するように構成されるとよい。 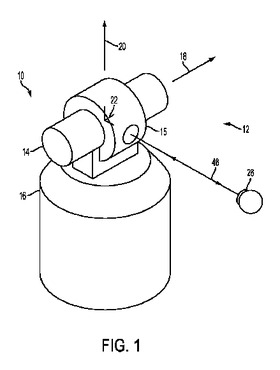 (もっと読む)
(もっと読む)
センサ固定具
【課題】複数個のセンサで形成される指向領域がつながるようにセンサを配置すること、さらには、各センサの指向領域を所定の測定対象空間の中で同じ向きにし、センサシステムとしての測定誤差を防止することを課題とする。
【解決手段】複数のセンサを固定可能な固定具であって、センサの測定動作を阻害しないようにセンサを個々に保持する保持部材と、複数の前記保持部材をその上下から固定する為の挟持部材と、前記保持部材と挟持部材とを固定する為の連結部材とを備え、前記挟持部材の挟持面には、保持部材を略円周方向に配置することを規制するための段差部が形成され、該段差部は、前記挟持面と直交する垂直段差面を有するものとする。
(もっと読む)
距離測定方法、距離測定システム及び距離センサー
【課題】距離測定方法を提供する。
【解決手段】距離測定方法は、複数の変調位相オフセットで複数の積分信号を測定する段階と、複数の変調位相オフセットのうちから他の一つの積分信号に対する受信時間を調節するために、複数の変調位相オフセットのうちから少なくとも一つに対する少なくとも一つの積分信号をそれぞれ推定する段階と、推定された少なくとも何れか一つの信号によってターゲットと受信器との距離を決定する段階と、を含む。
(もっと読む)
改善された光学測距カメラ
【課題】
一つの情景中の全ての画素から実質的に同時に深度情報を得る、改善された測距カメラを提供する
【解決手段】
情景中の被写体までの距離を示す画像を生成するための装置であって、第1変調関数を有しており、放射体を情景に向かわせる変調された放射体源と、第2変調関数により変調され、上記情景から反射された放射体を検知するとともに、上記検知され変調された放射体に応じて、上記情景の領域までの距離に応答する信号を発生する検知器と、該検知器からの信号を受信するとともに、上記装置からの被写体の距離を示す強度値分布を有する、上記信号に基づいて画像を形成するプロセッサと、該プロセッサにより形成された画像の強度値分布に応答して、上記第1変調関数および第2変調関数の少なくとも一つを変化させるコントローラとを含んでいる。
(もっと読む)
目標捕捉追尾装置
【課題】2次元画像の視野内に存在する目標の3次元形状を取得する際の視軸設定及び対象視野の自由度を向上させ、効率よく目標を追尾する目標捕捉追尾装置を得る。
【解決手段】2次元画像情報を取得するセンサを有する赤外線撮像部と、3次元形状情報を取得するセンサを有するレーザレーダ部とを分離した構成とし、2次元画像情報の視軸及び視野と、3次元形状情報を取得する方向及びその走査範囲とをそれぞれ独立に設定可能にする。そして、赤外線撮像部の視軸は自身の移動方向に一致させつつ、レーザレーダ部の視軸は、目標を捕捉する際には、赤外線撮像部の視軸の方向に一致させるとともに、赤外線撮像部の視野の方位角範囲に一軸走査してその3次元形状情報を取得する。また、目標を追尾する際には、目標の方向に視軸を設定し、これを基準とする限定された範囲を一軸走査して目標の3次元形状を取得する。
(もっと読む)
三次元形状測定装置
【課題】被測定物の奥行き方向の空間分解能を低下させずに測定範囲を拡大できる三次元形状測定装置を提供する。
【解決手段】色が規則的に経時変化するチャープ光パルスを生成する第1パルス光源30と、所定の波長の単波長光パルスを生成する第2パルス光源32と、ワーク24から反射されたチャープ光パルス110a、110bの第1反射光像を取得する反射光像取得部78と、前記第2反射光像の二次元情報を参照し、ワーク24から反射された単波長光パルス112の第2反射光像を取得する反射光像取得部78と、前記第1反射光像の二次元情報及び色情報を用いてワーク24の三次元情報を取得する三次元情報取得部80と、前記チャープ光パルスをワーク24に向けて照射するタイミングと、前記単波長光パルスをワーク24に向けて照射するタイミングとを調整するタイミング制御部70とを有する。
(もっと読む)
距離画像撮影装置
【課題】正確な距離画像の撮影を可能とする距離画像撮影装置を提供する。
【解決手段】撮像空間内に向けて光波を照射し、当該光波を照射された当該撮像空間内の物体からの反射波の伝搬遅延時間に基づいて物体までの距離を示す距離画像を撮像する距離画像撮影装置であって、異なる波長帯の複数の光波を他の物体に向けて発光する光波照射手段と、複数の光波の反射波を波長帯毎に受光し、各反射波の受光量を検出する受光手段と、複数の光波各々の伝搬遅延時間を算出する遅延時間算出手段と、受光した反射波の受光量の大きさを各々比較して、当該受光量の大小を判定する受光量判定手段と、少なくとも、受光手段における受光量が最も大きい波長帯の光波の伝搬遅延時間に基づいて物体までの距離を算出する距離算出手段と、距離算出手段により算出された物体までの距離に基づいて距離画像を生成する距離画像生成手段とを備える、距離画像撮影装置。
(もっと読む)
走行時間原理で動作する光センサ
【課題】単純な技術的手段によって、360°の走査範囲を実現する。
【解決手段】走行時間原理に基づいた光センサは、観察領域内に放射光パルスを放出する光源20と、前記放射光パルスのビーム方向を、当該ビーム方向に対して直角に配置される回転軸を中心に回転させる回転装置と、前記観察領域内の物体から反射された光パルスを検出する検出器50と、前記光源20を制御し、前記検出器50によって検出された前記光パルスを評価し、更に、前記光パルスについて測定された走行時間に基づいて物体の離隔距離を特定する制御評価ユニット90と、を含む。前記光センサは、前記回転装置がロータ40およびステータ30を有することと、光源20、検出器50、および制御評価ユニット90の一部を構成する電子アセンブリが、ロータ40上に配設されて、ロータと共に回転する。
(もっと読む)
光学センサシステムにおいて光源を駆動する電流源
光学センサシステムにおいて光源を駆動する電流源回路が開示されている。電流源は、抵抗器に直列接続されたインダクタ、及びインダクタと抵抗器に対して並列結合されたダイオードを含む。電流源は、調整された直流(DC)電圧を受け、スイッチが閉じているときにインダクタを通じて電流を光源へ供給し、スイッチが開いているとき、インダクタを通じた電流をダイオードへ流すように構成されている。  (もっと読む)
(もっと読む)
光学式変位計
【課題】正確な計測結果を得ることが可能な光学式変位計を提供する。
【解決手段】時点t21,t22,t23において、X方向における光の走査位置が位置P12に一致し、時点t21a〜t21bの期間、時点t22a〜t22bの期間、時点t23a〜t23bの期間に露光が行われる。この場合、露光の開始時点と終了時点との中間の時点で、投光方向が所定の方向と一致する。すなわち、時点t21a〜t21の期間の長さと時点t21〜t21bの期間の長さとが等しく調整され、時点t22a〜t22の期間の長さと時点t22〜t22bの期間の長さとが等しく調整され、時点t23a〜t23の期間の長さと時点t23〜t23bの期間の長さとが等しく調整される。
(もっと読む)
2D電子光学的画像データに対する3D点群データの登録
二次元画像データセット及び点群データを有する三次元画像の登録のための方法及びシステムについて開示している。本発明の方法は、シーンにおいて地表面を有する点群データの一部を除去するように、三次元画像データを有する点群データの三次元ボリュームをクロッピングするステップと、三次元ボリュームをm個のサブボリュームに分割するステップとにより始まる。次に、その方法は、二次元画像データをエッジ強調するステップを有する。次に、サブボリュームを各々適格化するために、フィルタ処理された濃淡画像を生成し、エッジ強調された前記二次元画像データ及び前記フィルタ処理された濃淡画像に基づいて、二次元相関表面を演算し、前記二次元相関表面のピークを求め、前記二次元画像における前記ピークの対応する位置を決定し、対応点セットを規定し、そして点セットリストにおける前記対応点セットを記憶するステップを有する。最終的には、点セットリストに含まれる複数の相関点セット間の誤差を最小化する変換が決定される。  (もっと読む)
(もっと読む)
シーン補間及び登録性能評価のための2D電子光学的画像及び3D点群データの融合
共通シーンの改善された可視化及び登録処理の成功裏の補間のための3D点群と2D画像を組み合わせる方法及びシステムについて開示している。結果として得られた融合データは、オリジナルの3D点群からの情報及び2D画像からの情報の組み合わせを有する。オリジナルの3D点群データは、カラーマップタグ化処理に従ってカラー符号化される。異なるセンサからのデータを融合することにより、結果として得られるシーンは、戦争空間認識、目標識別、レンダリングされたシーンにおける変化検出及び成功裏の登録の決定に関連する有用な複数の属性を有する。  (もっと読む)
(もっと読む)
場面の内容に基づく点群データの視覚化のための方法及びシステム
色と空間データを結びつけるシステム及び方法が提供される。前記システム及び方法において、場面タグが、場所についての放射測定画像800の部分804のために選択される。さらに、前記放射測定画像データの前記第一の部分に関連する前記空間データ200の部分が選択される。前記場面タグに基づいて、前記空間データの前記部分の色空間関数500、600が選択される。前記色空間関数は、前記空間データの高度座標の関数として、色相、彩度及び輝度(HSIを定義する。)前記空間データの前記部分は、前記空間データの前記部分に基づく前記色空間関数から選択されるHSI値を用いて表示される。前記システム及び方法において、場面タグはそれぞれ異なる区分に関連する。各色空間関数は、関連する区分の前記HSI値における所定の異なるバリエーションを表す。  (もっと読む)
(もっと読む)
三次元情報検出装置及び三次元情報検出方法
【課題】本発明は、高速に動く測定対象物に対しても、カメラから測定対象物までの距離を高精度な画像としてリアルタイムに検出する三次元情報検出装置及び三次元情報検出方法を提供することを目的とする。
【解決手段】強度変調光11を測定対象物200に照射する光源10と、
前記強度変調光の反射光12を受光し、該反射光の1周期の変調波に対して、又は所定の複数周期の変調波に対して、異なるタイミングでゲートを開放することにより撮像タイミングの異なる複数の画像61、62を取得する複数のゲート撮像素子41、42と、
前記複数の画像から、前記測定対象物の距離画像を算出する演算処理装置70と、を含むことを特徴とする。
(もっと読む)
41 - 60 / 151
[ Back to top ]