
Fターム[5J084BA02]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学系 (4,875) | 投光系に関するもの (2,428) | 光源の種類に関するもの (1,162)
Fターム[5J084BA02]の下位に属するFターム
レーザ光源 (1,039)
Fターム[5J084BA02]に分類される特許
121 - 123 / 123
非接触型検出装置及び制御装置
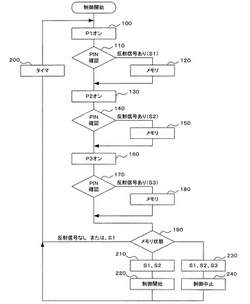
【課題】 演算の負担が少なく、確実に検出対象の状態を検出することができる非接触型検出装置、及びその検出結果に基づいて好適な制御を行うことができる制御装置を提供すること。
【解決手段】 ステップ100では、高輝度の赤外線を照射する。ステップ110では、PINに受信信号S1が入力したかを判定する。ステップ130では、中程度の輝度の赤外線を照射する。ステップ140では、PINに受信信号S2が入力したか否かを判定する。ステップ160では、低輝度の赤外線を照射する。ステップ170では、PINに受信信号S3が入力したかを判定する。ステップ190では、メモリに記憶した受信信号の状態に応じて制御の内容を設定する。例えば受信信号S1、S2が記憶されている場合には、第2領域に手が進入したとみなしてドームランプ1を点灯し、受信信号S1〜S3が記憶されている場合には、第3領域に手が進入したとみなしてドームランプ1を点灯する制御を実施しない。
(もっと読む)
距離計測機能付きランプ装置

【課題】 ランプカバーの内面で反射した反射散乱光による受信信号の飽和等による近距離領域の検出感度が低下するのを回避して、安定した物標検出を行う。
【解決手段】 一対の車両用ランプに、LED31L,31R、LED駆動部32L,32Rと、フォトダイオード42L,42Rとを有し、送信トリガ発生部21L,21Rにより一対の車両用ランプによる送信信号の送信を時分割で交互に行わせ、距離算出部22により、発光ダイオードをパルス発光させてから、反射信号を受信するまでの時間差に基づいて、当該物標までの距離を算出する。このとき、距離算出部22は、一方の車両用ランプにおける発光ダイオード31Lから送信信号が送信された場合には、送信信号を送信していない他方の車両用ランプのフォトダイオード42Rによって受信された信号を用いて物標までの距離の算出を行う。
(もっと読む)
変調光による距離測定装置
【課題】 拡散光によるトランスポンダ方式により、例えば圃場内や工場内などを移動する移動体の位置計測、または2台の移動体間の距離計測を高精度かつ低コストで行う。
【解決手段】 第1の周波数で変調された第1の変調光(80)を所定の角度範囲にわたって放射可能に配置された複数の発光ダイオード(33)を有する光送信部(68)と、第2の周波数で変調された第2の変調光を所定の角度範囲にわたって受信可能に配置された光受信部(70)とを備えた光送受信器(37)を具備する光トランスポンダ方式による距離測定装置。
(もっと読む)
121 - 123 / 123
[ Back to top ]