
Fターム[5J084BA02]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学系 (4,875) | 投光系に関するもの (2,428) | 光源の種類に関するもの (1,162)
Fターム[5J084BA02]の下位に属するFターム
レーザ光源 (1,039)
Fターム[5J084BA02]に分類される特許
41 - 60 / 123
撮像デバイス及び撮像装置
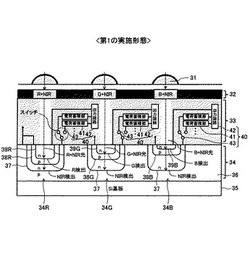
【課題】光源から投射された光を利用して被写体までの距離を取得する距離画像センサ、及び光源から投射された光により生体を検出する生体検出センサの機能を、RGB等の画像及び近赤外光画像を取得する1つの撮像デバイスを用いて実現する。
【解決手段】本発明の撮像デバイスは、光学フィルタ32、可視光センサ(2つの層38と39で形成される可視光センサ)と近赤外光センサ(2つの層36と37で形成される非可視光センサ)を光の進入方向に配置し、可視光画像と近赤外光画像を分離して出力する出力部40を有する。そのため、各画像間の画像ズレがなく、かつ解像度の欠損もなく、距離測定や生体検出の機能を高解像度撮像が可能な1つの撮像デバイスを用いて実現することが可能となる。
(もっと読む)
方向検知デバイスおよび電子機器

【課題】被検知対象物の2軸に関する移動方向を検知する方向検知デバイスであって、安価である方向検知デバイスを実現する。
【解決手段】方向検知デバイス100は、被検知対象物106を検知するための検知信号を出力する発光部105Dと、検知信号が被検知対象物106にて反射されて得られた反射後検知信号が入力されるとともに、そのそれぞれが、3つの異なる出力A〜Cを出力する受光部105A〜105Cと、判定信号A〜Cの論理積を求めることによって、判定信号Dを生成する論理積回路102と、判定信号A〜Dに基づいて、被検知対象物106の、X軸およびY軸の2軸に関する移動方向を検知する判定装置103と、を備える。
(もっと読む)
シールドとレンズが改良された光学式近接センサ
【課題】シールドとレンズが改良された光学式近接センサを提供する。
【解決手段】下にある発光体16及び光検出器12のアセンブリに対して迅速にかつ正確に位置合わせ及び位置決めされうる光シールド18を備えた光センサ10。光学式近接センサによって放射されまた受け取られる光を効率的に平行化し、かつクロストークを減少させるレンズ配列を備える。
(もっと読む)
距離情報抽出方法及び該方法を採用した光学装置
【課題】距離情報抽出方法及び該方法を採用した光学装置を提供する。
【解決手段】数学的に理想的な波形ではない実際の非線形的波形を考慮し、光学装置と被写体との間の距離を決定する方法及び装置が開示され、該方法と装置は、被写体に投射された波形の類型の制限を受けることなく正確な距離情報を抽出でき、歪曲及び非線形性がほとんどない高価の光源や光変調素子を使用する必要がなく、複雑な誤差補償手段が要求されない。また、既存の光源、光変調素子及び光学装置をそのまま利用でき、追加コストがかからない。さらに、あらかじめ計算された距離情報が保存されているルックアップテーブルを使用するために、距離情報を抽出するにおいて演算量が非常に小さいので、リアルタイム距離情報映像の撮影が可能である。
(もっと読む)
ピクセルアレイと記憶アレイを別個に備える復調センサ
【課題】ピクセルの開口率および画像品質を犠牲にすることなくピクセルサイズを縮小可能であり、各ピクセルの信号ごとに追加の後処理回路を所望に組み込むことができ、モーションアーチファクトを最小限に抑えることのできる復調センサを提供する。
【解決手段】複数のピクセル210を含み、各ピクセル210が少なくとも2個のサンプルを生成するピクセルアレイ110と、複数の記憶要素310を含み、各記憶要素310が複数のピクセル210のうちの対応する1つから少なくとも2個のサンプルを受け取る記憶アレイ150とを備える。
(もっと読む)
距離画像生成装置および距離画像生成方法
【課題】撮影対象空間内の対象物に応じて、効率よく高い品質の距離画像を得る。
【解決手段】光電変換素子で受光した受光量に応じた電荷量から各画素の強度値を算出し、強度が所定以下の画素についてのみ補正を行う。補正は、同一画素の電荷量を時間方向に過去に遡り加算することにより行う。加算は、加算後の電荷量から算出した強度値が所定以上となるまで行う。そして、補正後の電荷量から、距離値を算出し、距離画像を生成する。
(もっと読む)
画像センサとその画像センサに用いられる受光装置
【課題】 距離画像データと部位判別画像データの双方を取得可能な画像センサを提供すること。
【解決手段】 画像センサ100は、照射装置20と撮像装置40と演算装置60を備えている。照射装置20は、第1波長光を照射する第1光源22と、第2波長光を照射する第2光源を有する。演算装置60は、少なくとも第1波長光が照射装置20から対象物で反射して撮像装置40に到達するまでの距離に基づいて距離画像データを演算する。演算装置60はさらに、対象物における第1波長光の第1反射光の反射特性と対象物における第2波長光の第2反射光の反射特性の差に基づいて部位判別画像データを演算する。
(もっと読む)
空間情報検出装置
【課題】複数台の空間情報検出装置が存在する場合でも、独立して空間情報を検出する。
【解決手段】空間情報検出装置は、対象空間に投光する発光源2と、発光源2から投光する光の強度を変調する発光制御部3と、対象空間からの受光光量に応じた電荷を生成する光検出素子1と、光検出素子1の出力から対象空間に存在する物体Obまでの距離を求める距離演算部4とを備える。発光制御部3は、投光期間と休止期間とを設けるように発光源2を制御する。距離演算部4は、休止期間の電荷から環境光成分における変動成分の存否を判定する干渉判定部を備える。距離演算部4は、光検出素子1が受光する環境光成分のうち特定の2種類の位相区間の差分の積算値を所定の積分時間において求め、干渉判定部において積算値の差分が環境光成分の影響を受けていると判定した場合は当該差分を採用せず、差分が閾値以下の場合に当該差分を用いて空間情報としての距離を求める。
(もっと読む)
画像撮像装置
【課題】レーザレーダの測距精度の向上、レーザ光路上に複数の目標が有る場合への対応、および霧・雨等の影響を除去したデータ(画像)の取得。
【解決手段】レーザ照射後、光路上の全ての反射レーザ光の信号レベルをA/D変換器により時系列に取得する。A/D変換した信号からソフトウエアによる移動平均、ピーク検出処理により受光信号のピークレベルを正確に検知し、精度の高い測距データを得る。また、A/D変換データ上にある複数のピークを検出することにより、複数目標の距離を測定可能となる。更に、A/D変換データ上の所定の閾値以上の反射信号強度のみを抽出、表示することにより、霧・雨や背景のデータを削除した画像を表示する。
(もっと読む)
2次元及び3次元位置検出システム、及びそのセンサ
2次元及び3次元の位置検出システム、ならびにそのシステムで使用されるセンサが開示される。センサは、線形アレイセンサ、及び、光又は他の放射線がセンサの大部分の素子に到達するのを遮るための開口プレートを内包する。相対的な放射線源の方向が、各センサの内の放射されたセンサ素子に基づいて、決定される。センサは、放射線源の位置を推定可能とするために、システム内に組み合わされる。 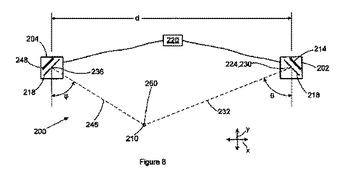 (もっと読む)
(もっと読む)
周辺物体検出装置、周辺物体検出方法
【課題】より正確に周辺物体を検出することができる周辺物体検出装置、周辺物体検出方法を提供する。
【解決手段】周辺物体検出装置1は、所定周期で強度変調された照射光を対象空間に照射する照射手段2と、対象空間において発生する反射光を所定周期内において複数設定された受光期間において受光し、受光された反射光の受光光量に応じた電荷を生成する光電変換手段5と、電荷に基づいて所定周期内の複数の受光期間毎の受光光量を検出する受光光量検出手段と、複数の受光期間毎の受光光量と第一換算式により照射光と反射光の位相差を算出する位相差算出手段と、第二換算式により反射光の輝度を算出する輝度算出手段と、位相差と第三換算式に基づいて周辺物体との相対距離を算出する相対距離算出手段と、輝度が所定閾値以上であって相対距離の一定期間内の変動距離が一定変動距離以下である場合に、周辺物体が虚像であると判定する虚像判定手段とを含む。
(もっと読む)
距離画像撮影装置
【課題】正確な距離画像の撮影を可能とする距離画像撮影装置を提供する。
【解決手段】撮像空間内に向けて光波を照射し、当該光波を照射された当該撮像空間内の物体からの反射波の伝搬遅延時間に基づいて物体までの距離を示す距離画像を撮像する距離画像撮影装置であって、異なる波長帯の複数の光波を他の物体に向けて発光する光波照射手段と、複数の光波の反射波を波長帯毎に受光し、各反射波の受光量を検出する受光手段と、複数の光波各々の伝搬遅延時間を算出する遅延時間算出手段と、受光した反射波の受光量の大きさを各々比較して、当該受光量の大小を判定する受光量判定手段と、少なくとも、受光手段における受光量が最も大きい波長帯の光波の伝搬遅延時間に基づいて物体までの距離を算出する距離算出手段と、距離算出手段により算出された物体までの距離に基づいて距離画像を生成する距離画像生成手段とを備える、距離画像撮影装置。
(もっと読む)
トランジットタイム原理に基づいて動作する光学センサ
【課題】トランジットタイム原理に基づいた光学センサに関し、仕切りスクリーンの検査を可能にする光センサの提供。
【解決手段】光学センサは、発光パルスを観察領域に放射するための光源と、前記発光パルスのビーム方向を、回転させるための回転装置と、前記観察領域における対象物により反射された光パルスを検知するための検知器と、前記センサの内部を周囲環境から離隔しておくための、透明な仕切りスクリーンを含むハウジングと、前記仕切りスクリーンの透光性をテストするためのテスト装置と、前記光源を制御し、前記検知器により検知された前記光パルスを評価し、且つ、対象物からの距離を、前記光パルスの測定されたトランジットタイムに基づいて決定するための、前記テスト装置と協働する制御及び評価ユニットとを含む。
(もっと読む)
光学センサシステムにおいて光源に流れる電流の上昇時間を早める高電圧源
光学センサシステムにおいて、高電圧源回路により光源が駆動される。高電圧源により、高電圧出力が、光源のオン期間の開始期間に光源へと供給され、光源に流れる電流の上昇時間が減じられる。光源オン期間の開始の後、高電圧出力が、回路から非接続とされ、電流源が、電流出力を光源へと供給し、その余の光源オン期間の期間、光源を駆動する。  (もっと読む)
(もっと読む)
光センサシステム用の二重電圧電流制御フィードバックループ
光センサシステム用の二重電圧電流制御フィードバックループが提供される。電源が直流(DC)安定化電圧出力を提供する。電流源が直流(DC)安定化電圧出力を受け、光源にスイッチド電流を提供する。電流源が光源を駆動する際は光源への電流を表す電流フィードバックがフィードバックパス上で電源に提供される。電流源が光源を駆動しない場合は直流(DC)安定化電圧出力を表す電圧フィードバックがフィードバックパス上で電源に提供される。  (もっと読む)
(もっと読む)
光学センサシステムにおいて光源を駆動する電流源
光学センサシステムにおいて光源を駆動する電流源回路が開示されている。電流源は、抵抗器に直列接続されたインダクタ、及びインダクタと抵抗器に対して並列結合されたダイオードを含む。電流源は、調整された直流(DC)電圧を受け、スイッチが閉じているときにインダクタを通じて電流を光源へ供給し、スイッチが開いているとき、インダクタを通じた電流をダイオードへ流すように構成されている。  (もっと読む)
(もっと読む)
物体検知装置
【課題】被検知物の存在、方向、または距離だけでなく、形状や大きさをも検知することができる超小型物体検知装置を提供する。
【解決手段】物体検知装置1は、発光素子3と、これから照射された光を線状光に変換する回折光学素子4とを回転させる回転駆動手段と、前記線状光をその線方向と直交する方向に走査することによって形成される検知領域にある被検知物から反射された反射光を受けて反射光のパターンを生成する撮像素子5と、前記撮像素子により生成された前記反射光のパターンから前記被検知物の存在、その方向、形状又は大きさを検知する検知回路6とを備える。
(もっと読む)
三次元情報検出装置及び三次元情報検出方法
【課題】本発明は、高速に動く測定対象物に対しても、カメラから測定対象物までの距離を高精度な画像としてリアルタイムに検出する三次元情報検出装置及び三次元情報検出方法を提供することを目的とする。
【解決手段】強度変調光11を測定対象物200に照射する光源10と、
前記強度変調光の反射光12を受光し、該反射光の1周期の変調波に対して、又は所定の複数周期の変調波に対して、異なるタイミングでゲートを開放することにより撮像タイミングの異なる複数の画像61、62を取得する複数のゲート撮像素子41、42と、
前記複数の画像から、前記測定対象物の距離画像を算出する演算処理装置70と、を含むことを特徴とする。
(もっと読む)
光学距離センサー
【課題】 高い感度を備えると共に、反射に関して波長選択性を有する距離測定目標物であっても、正確に距離を測定することができる光学距離センサーを提供する。
【解決手段】 発光部11と、上記発光部から光を照射して距離測定目標物17で反射した光を受光する受光部12と、上記発光部からの発光信号及び上記受光部の受光信号の位相差に基づいて、距離測定目標物までの距離を演算する制御部13と、を含むタイムオブフライト方式の光学距離センサー10において、上記発光部が、互いに異なる複数の色の光を互いにタイミングをずらして発光し、上記受光部が、上記距離測定目標物からの反射光をそのまま受光して、積算するように、光学距離センサー10を構成する。
(もっと読む)
センサ校正装置、及び、センサ校正方法
【課題】距離画像センサ等の測距センサを適正に且つ簡便に校正する。
【解決手段】センサ校正ECU1は、車両VCの状態及びVC車両が位置している路面SRの状態の少なくとも一方に基づいて、距離画像センサ2が校正可能状態であるか否かを判定する校正可否判定部12、及び、校正可否判定部12によって校正可能状態であると判定された場合に、距離画像センサ2と該車両VCが位置している路面SRとの予め求められた距離(=基準距離)に基づいて、距離画像センサ2を校正する校正実行部13、を備える。
(もっと読む)
41 - 60 / 123
[ Back to top ]