
Fターム[5J084BA02]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学系 (4,875) | 投光系に関するもの (2,428) | 光源の種類に関するもの (1,162)
Fターム[5J084BA02]の下位に属するFターム
レーザ光源 (1,039)
Fターム[5J084BA02]に分類される特許
21 - 40 / 123
車両の物体距離認識システム及び作動方法{VEHICULAROBJECTRANGINGSYSTEMANDMETHODOFOPERATION}
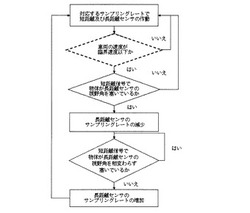
【課題】本発明は、長距離センサ及び短距離センサを持つ車両の物体距離認識システムにおいて、センサ自体によって提供された情報に基づき、少なくとも1つのセンサのサンプリングレートを減少させ、平均故障間隔の向上を図るためのものである。
【解決手段】長距離視野角を有する長距離センサ、及び前記長距離視野角をオーバーラッピングして超過する短距離視野角を有し、角度分解能を有する短距離センサを持つ車両の物体距離認識システムにおいて、サブシステムの作動に求められる放射されたレーザパルスの数を減少させ、前記サブシステムのレーザエミッタの寿命を延ばすために、2つの相補的な物体検知及び距離認識サブシステムのサンプリング回数変調方法を開示する。
(もっと読む)
光学式位置検出装置および入力機能付き表示システム

【課題】受光素子に対する電気ノイズに対する影響を阻止することにより、誤検出の発生を防止することのできる光学式位置検出装置、および当該光学式位置検出装置を備えた入力機能付き表示システムを提供すること。
【解決手段】光学式位置検出装置において、受光部13は、検出光が放射状に出射された検出対象空間に位置する対象物体で反射した検出光を受光する。受光部13には、受光素子130の受光面131を部分的に覆うシールド部材14が設けられている。シールド部材14において、入射部140は、受光面131に対する法線方向から一方側および反対側に傾くに伴って幅広になっている。従って、受光素子130での受光強度は、受光面131に対する法線方向から入射した検出光と、受光面131に対する法線方向から傾いた斜め方向から入射した検出光とにおいて差が小さい。
(もっと読む)
プラットホームドア用安全装置
【課題】 従来より耐久性を向上することができるプラットホームドア用安全装置を提供する。
【解決手段】 プラットホームドア用安全装置30は、プラットホームドア20に設置されてプラットホームドア20の近傍に存在する物体を検出するタイムオブフライト方式の三次元センサ40と、入射光に対して反射光を減衰する光減衰部50とを備えており、三次元センサ40は、所定の範囲に赤外光を発する複数のLEDと、複数のLEDから発せられて物体によって反射された赤外光を受ける複数の受光素子とを備えており、複数の受光素子は、前記所定の範囲のうち各々の担当の範囲からの光を受け、複数のLEDは、複数の受光素子の各々の担当の範囲に光を同時に発し、光減衰部50は、複数のLEDから発せられた赤外光の少なくとも一部が入射する位置に配置されていることを特徴とする。
(もっと読む)
位置検出システム及び投射型表示システム
【課題】複数の検出対象物の位置をそれぞれ検出することができる光学式の位置検出システムを提供する。
【解決手段】光学式の位置検出システム1000は、第1検出対象物31と第2検出対象物32とに向けて光を射出する光射出部20と、波長の異なる第1検出対象物31からの第1反射光41を受光する第1受光部51と第2検出対象物32からの第2反射光42を受光する第2受光部52を有し、前記第1検出対象物31は前記第1反射光41を反射する第1反射フィルター61を有し、前記第2検出対象物32は前記第2反射光42を反射する第2反射フィルター62を有する。
(もっと読む)
光学式位置検出装置、電子機器及び表示装置
【課題】対象物の位置に応じて効率良く位置検出ができる光学式位置検出装置、電子機器及び表示装置等を提供する。
【解決手段】光学式位置検出装置は、X−Y平面に沿って設定される検出エリアRDETに照射光LTを射出する光射出部3と、検出エリアRDETにおいて照射光LTが対象物OBに反射したことによる反射光LRを受光する受光部4と、受光部4の受光結果に基づいて、対象物OBの位置情報を検出する検出部50とを含む。光射出部3は、X−Y平面に直交するZ軸での対象物OBのZ座標位置に応じて、受光部4が検出する位置情報の検出精度を異ならせるように照射光LTを射出する。
(もっと読む)
物体検出ユニット
【課題】物体の誤検出を抑えたい領域と、物体の見逃しを抑えたい領域とが、混在する検出空間に対して、領域毎に、その領域に合わせた物体の検出が行える物体検出ユニットを提供する。
【解決手段】発光部31を発光させて入出口の幅方向に検出波を照射し、受光部32で反射波を検出する。記憶部5、物体の仮検出に用いる受光部32の受光光量の下限を設定する仮検出レベル、および仮検出した物体の本検出に用いる受光部32の受光光量であって、仮検出した物体までの距離に応じて下限を設定する本検出レベルを記憶する。測距部3は、受光部32で検出した反射波の受光光量が、記憶部5に記憶している仮検出レベルを超えているときに、物体を仮検出するとともに、この仮検出した物体までの距離を算出する。制御部2は、本検出レベルを用いて、仮検出した物体が物体であるかどうかを判定する。
(もっと読む)
情報処理システム、情報処理プログラム、情報処理装置、入力装置、および情報処理方法
【課題】ユーザの動作をより細かく判定することができる情報処理システム、情報処理プログラム、情報処理装置、入力装置、および情報処理方法を提供する。
【解決手段】情報処理システムの一構成例は、ユーザの身体の少なくとも一部を乗せることが可能な第1の入力装置と当該第1の入力装置から得られたデータを処理する情報処理装置とを含む。第1の入力装置は、ユーザの身体の少なくとも一部を乗せる第1の台部、および距離データ出力手段を備える。距離データ出力手段は、第1の台部の台面に対して離間する方向に位置する物体までの距離にしたがって決められる距離データを出力する。情報処理装置は、データ取得手段および処理手段を備える。データ取得手段は、距離データ出力手段から出力された距離データを取得する。処理手段は、データ取得手段が取得した距離データに基づいて、所定の処理を行う。
(もっと読む)
レーザレーダ
【課題】障害物がレーザレーダに接近した位置に有る場合も、障害物までの距離を精度よく測定することができるレーザレーダを提供する。
【解決手段】レーザレーダ1は、レーザ光を出射するレーザ光源21と、目標領域においてレーザ光を走査させるミラーアクチュエータ24と、目標領域において反射されたレーザ光を受光する光検出器33と、レーザ光のパルス幅を制御するとともに、光検出器33から出力される信号に基づいて目標領域における障害物までの距離を測定するDSP106と、を備える。DSP106は、目標領域における障害物までの距離に適するパルス幅を決定し、決定したパルス幅のレーザ光により障害物との距離を測定する。
(もっと読む)
物体検出ユニット
【課題】外乱光や電気的ノイズによる影響を抑え、物体の検出精度を向上させた物体検出ユニットを提供する。
【解決手段】測距部3は、発光部31と、受光部32とを有する。測距部3は、発光部31を発光させ、受光部32で受光した受光光量に基づき物体を仮検出するとともに、ここで仮検出した物体までの距離を算出する。記憶部5が、物体までの距離の変化に応じて受光部32での受光光量の下限閾値を設定する下限パラメータ、および物体までの距離の変化に応じて受光部32での受光光量の上限閾値を設定する上限パラメータを記憶する。制御部2は、受光部32で受光した受光光量が、測距部3が算出した仮検出した物体までの距離において、下限パラメータで決定される下限閾値と、上限パラメータで決定される上限閾値と、の間に位置していなければ、この仮検出した物体を物体でないと判定する。
(もっと読む)
乗員頭部検知装置
【課題】演算負荷の増大を防止しつつ検知精度を向上させる。
【解決手段】乗員頭部検知装置10は、単眼距離画像センサ11から出力される距離画像を構成する複数の画素毎に3次元空間での法線ベクトルの逆方向に固定長の逆ベクトルを算出し、該逆ベクトルにより指定される3次元空間での位置座標を内部座標とする内部座標設定部52と、3次元空間を構成する複数の単位空間毎に該単位空間内に含まれる内部座標の総数に係るスコア値を算出し、複数の画素毎に対応する内部座標が含まれる単位空間のスコア値を複数の画素毎に対応させて示すスコア画像を生成するスコア画像生成部53とを備え、スコア画像を構成する複数の画像領域のうちからスコア値に基づいて車室内の乗員の頭部領域を抽出する。
(もっと読む)
乗員検知装置
【課題】乗員とチャイルドシートとの存在を精度良く判定する。
【解決手段】乗員検知装置10は、単眼距離画像センサ11から出力される距離画像に基づき、乗員の頭部領域を検知する頭部領域検知部52およびシートの領域を検知するシート領域検知部53と、シートの領域を距離画像から除去して得られるシート領域除去画像に基づき、頭部領域を有する乗員領域の体積を推定し、該体積が所定体積範囲内であるか否かを判定する体積判定部54と、乗員領域の体積が所定体積範囲内であると判定された場合に、頭部領域の断面画像と乗員領域の断面画像とを比較し、乗員の肩部の有無を判定し、乗員の肩部が存在すると判定された場合には乗員領域には大人が存在すると判定し、乗員の肩部が存在しないと判定された場合には乗員領域にはチャイルドシートおよび該チャイルドシートに着座した子供が存在すると判定する乗員判定部56とを備える。
(もっと読む)
乗員検知装置
【課題】大人と子供とを精度良く判別する。
【解決手段】乗員検知装置10は、単眼距離画像センサ11から出力される距離画像に基づき、乗員領域の体積を推定し、該体積が所定体積閾値以上であるか否かを判定する体積判定部56と、車両上下方向の所定位置よりも下方側に車室内の乗員の膝部が存在するか否かを判定する膝部判定部57と、体積判定部56により乗員領域の体積が所定体積閾値以上であると判定された場合であって、膝部判定部57により所定位置よりも下方側に膝部が存在すると判定された場合には乗員は大人であると判定し、膝部判定部57により車両上下方向の所定位置よりも下方側に膝部が存在しないと判定された場合には乗員は子供であると判定する乗員判定部58とを備える。
(もっと読む)
姿勢検出装置
【課題】人物にマーカーを設置することなく、人物の姿勢を高精度で検出する。
【解決手段】各画素における輝度値がカメラから物体までの距離を示す距離画像を取得する距離画像取得部10と、前記距離画像取得部10が取得した前記距離画像に基づいて、三次元空間中での物体の座標を計算する座標計算部20と、前記座標計算部20が計算した物体の座標に基づいて、三次元空間中で所定の体積しきい値以上の体積を占める物体の領域である人物領域を決定する人物領域決定部30と、前記人物領域決定部30が決定した前記人物領域に、人体の骨格をモデル化した骨格モデルを当てはめることにより被写体人物の姿勢を検出する姿勢検出部40とを備える。
(もっと読む)
姿勢検出装置
【課題】被験者の姿勢を示す値を正確に算出する。
【解決手段】各画素における輝度値がカメラから被験者までの距離を示す距離画像を取得する距離画像取得部102と、距離画像取得部102が取得した距離画像に基づいて、被験者に貼付された複数のマーカーの三次元空間中での座標を算出する座標算出部104と、座標算出部104が算出した複数のマーカーの座標から、被験者の姿勢を示す値を算出する姿勢算出部106とを備える。
(もっと読む)
LEDライダー装置
【課題】小型化、軽量化が可能であって、よりブラインドエリアが小さく、性能も実際の装置として実用性のあるLEDライダー装置を提供する。
【解決手段】LEDライダー装置において、光を発するLED光源と、LED光源が放出する光を平行にするとともに、光のうち測定対象によって散乱されて戻る光を集光するレンズと、LED光源を配置するホールが形成され、LED光源の光軸に対し傾けて配置されるミラーと、ミラーにより反射した光を透過させるためのピンホールが形成された遮光フィルタと、遮光フィルタの前記ピンホールを透過した光を受ける受光装置と、を有する。
(もっと読む)
距離センサ及び距離画像センサ
【課題】不要なノイズ成分の発生を抑制し、高精度な距離検出を行なうことが可能な距離センサ及び距離画像センサを提供すること。
【解決手段】距離画像センサ1は、光入射面1FTと裏面1BKとを有する半導体基板1A、フォトゲート電極PG、第1及び第2ゲート電極TX1,TX2、第1及び第2半導体領域FD1,FD2、並びに第3半導体領域SR1を備えている。フォトゲート電極PGは、光入射面1FT上に設けられる。第1及び第2ゲート電極TX1,TX2は、フォトゲート電極PGに隣接して設けられる。第1及び第2半導体領域FD1,FD2は、各ゲート電極TX1,TX2の直下の領域に流れ込む電荷を蓄積する。第3半導体領域SR1は、第1及び第2半導体領域FD1,FD2から裏面1BK側に離れて設けられ、第1及び第2半導体領域FD1,FD2と逆の導電型である。
(もっと読む)
三次元及び色彩検出における電荷管理のための方法及び装置
【課題】距離計、画像マッピング、三次元画像キャプチャ、及び人間の色感覚によって限定されない色感覚での画像のキャプチャを含み得る三次元応用例に適したCMOS実装可能な画像センサ、及び、そのような検出器の検出特性を改善する。
【解決手段】オンチップ測定情報を、順番にではなく、ランダムに出力することができ、三次元画像を必要とするオブジェクト追跡、及び他の情報のためのオンチップ信号処理を、すぐに遂行することができる。システム全体は小さく、強固で、かなり少ないオフチップの別個の構成要素を必要とし、かつ、検出信号特性の改善を示す。オンチップ回路は、そのようなTOFデータを使って、場面内の一つのオブジェクト、又は全てのオブジェクト上の全ての点の距離及び速度を、同時に、容易に測定することができる。オンチップ回路はまた、検出センサ内の各画素における検出画像の分光組成を特定することができる。
(もっと読む)
距離測定装置
【課題】対象物体との距離が遠くても測距精度が低下しない。
【解決手段】赤外LEDとイメージセンサ12とが基板上に設置されて、距離測定装置が構成されている。イメージセンサ12には、ピクセルアレイ20と、ピクセルアレイ20の各ピクセルからの受光信号を処理するDSP回路21と、DSP回路21による処理の際に用いる情報等を格納するメモリ22と、上記赤外LEDを駆動するドライバ回路23とが内蔵されている。DSP回路21は、対象物体で拡散反射されてピクセルアレイ20上に形成された光量分布24の直径を求め、メモリ22に格納されている対照値との比較により、対象物体までの距離を求める。したがって、対象物体の反射率が不均一であってもその影響を極小さくすることができ、対象物体までの距離をより正確に求めることができる。
(もっと読む)
測距装置および電子機器
【課題】測距と同時に方向検知を可能とする測距装置を提供する。
【解決手段】測距装置は、第1の発光素子105aおよび第2の発光素子105bと、受光素子106と、演算部110とを有する。演算部110は、受光素子106の光強度分布において、強度が最も強くなる地点を最大ポイントと定義し、光強度分布の両端を第1の最端ポイントおよび第2の最端ポイントと定義したとき、最大ポイントと第1の最端ポイントとの間の距離と最大ポイントと第2の最端ポイントとの間の距離との比率に基づいて、被検出物までの距離と被検出物の移動方向とを演算する。
(もっと読む)
目標追跡装置及び目標判定方法
【課題】目標エコーを確実に追跡可能な目標追跡装置を提供すること。
【解決手段】本実施形態に係る目標追跡装置は、参照光を発生する参照光発生装置2と、参照光を目標に向け照射する光学部品12と、参照光による目標からの反射光を撮像面に結像させることにより目標エコーを撮像するカメラ11と、カメラ11により撮像された画像上で目標候補を抽出し、カメラ11の視軸と光学部品12の角度とに基づいて、画像上での目標エコーの出現予測範囲を算出し、出現予測範囲にある目標候補を目標エコーと判定する制御装置3とを備える。
(もっと読む)
21 - 40 / 123
[ Back to top ]