
Fターム[5J084BB07]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学要素 (2,698) | レンズ (825) | シリンドリカルレンズ (46)
Fターム[5J084BB07]に分類される特許
1 - 20 / 46
形質計測装置及び形質計測システム
【課題】映像情報を用いることなく、形状データに基づくルゴシティを得ることで、水中の形質を簡単に把握することができる形質計測装置を提供する。
【解決手段】レーザ発振器15によって水中の測定領域に向けてレーザ光を射出する。光センサ19によって測定領域に照射されたレーザ光の散乱光を反射光として検出する。演算用PC11によって反射光に基づいて測定領域の形状データを計測し、計測した形状データに基づいて、測定領域の面積と表面積との関係をルゴシティとして算出し、算出したルゴシティに基づいて測定領域の形質を判定する。
(もっと読む)
光偏向素子、レーザ装置及びセンシング装置

【課題】小型化が容易で、2方向において大きな偏向角を得ることができる光偏向素子を提供する。
【解決手段】 入射された光を、印加電圧に応じてXY面内で偏向する周期分極反転構造体、及び周期分極反転構造体を通過した光を該光の進行方向を含みXY面に直交する面内で偏向するグレーティングを有する光偏向ユニットが、XY面に直交する方向(Z軸方向)に複数積み重ねられている。そして、該複数の光偏向ユニットにおける各グレーティングの溝周期は、互いに異なっている。この場合は、小型で、2方向において大きな偏向角で光を射出することができる。
(もっと読む)
レーザレーダシステム及び移動体
【課題】簡便な処理で、小型なレーザレーダシステムを提供できる。
【解決手段】スキャンモードでは電気光学結晶を用いた光偏向素子21によって広範囲な偏向範囲で走査する。対象物からの反射光を受光素子31によって受光して対象物を捕捉する。時間計測部220によって発光して受光するまでの時間を計測し、この時間に基づいて距離・差速計算部231によって対象物までの距離や差速が計算される。一方、スキャンモードから切り替わったトラッキングモードでは、光偏向素子21によってスキャンモード時の偏向角より微小な偏向角で偏向走査する。対象物からの複数の反射光を受光素子によって受光して対象物を追尾する。
(もっと読む)
物体検知装置
【課題】可動部がなく耐久性や信頼性が高く、広範囲の対象空間を設定することを可能にしながらも投光に要するエネルギーを低減可能な距離センサを提供する。
【解決手段】発光源1は、強度が時間経過に伴って変化する変調光を投光する。演算処理部7は、発光源1による投光から撮像素子2による受光までの時間差に相当する情報を変調光の時間変化と撮像素子2の各受光領域での受光強度とから抽出し、距離を画素の値とする距離画像を生成する。発光源1の前方には、変調光をスリット光として対象空間に投光するスリット光形成部3bと、変調光をスポット光として対象空間に投光するスポット光形成部3cとを備えた投光光学系3が配置される。
(もっと読む)
ビーム照射装置およびレーザレーダ
【課題】シリンドリカルレンズ等のビーム整形用レンズを用いることなく、安定したビームプロファイルにて、ビームを目標領域に照射可能なビーム照射装置を提供する。
【解決手段】レーザ光を出射するレーザ光源410と、レーザ光源410から出射されたレーザ光が入射される収束レンズ430と、収束レンズ430を透過したレーザ光を目標領域において走査させるためのミラーアクチュエータ100を備える。レーザ光源410は、レーザチップのpn接合面が鉛直方向に平行となるように配される。レーザ光源410の発光部の鉛直方向に平行な方向の長さによって、目標領域におけるレーザ光の鉛直方向の長さが設定される。また、レーザ光に対する収束レンズ430の波面収差が0.15λrms以下に設定されている。
(もっと読む)
ミラーアクチュエータおよびビーム照射装置
【課題】回動軸における摩擦や不要な制動力を抑制でき、ミラーの回動性能を高めることができるミラーアクチュエータおよびこのミラーアクチュエータを搭載したビーム照射装置を提供する。
【解決手段】ミラーアクチュエータ100は、マグネットユニット130と、マグネットユニット130に固定された支軸111と、支軸111に回動可能に軸支されたチルトユニット110と、チルトユニット110に固定され支軸111に垂直な支軸125と、支軸125に回動可能に軸支されたパンユニット120と、パンユニット120に装着されたミラー140とを備える。チルトユニット110とパンユニット120は、それぞれ、支軸111と支軸125を1ヵ所で軸受けする軸受部112と軸受部122を有する。
(もっと読む)
物体検知装置
【課題】距離センサの視野内にドアが存在する場合でも、監視対象である物体の状態をドアの移動と分離して判断可能にする。
【解決手段】距離センサAは、視野領域に存在する物体までの距離を計測して距離画像を生成する装置であり、ドアにより開閉される開口部の上方に配置され視野領域が下方に設定される。距離センサAの視野領域には、走行駆動されて開口部を開閉するドアが含まれる。領域規定手段9は、ドアが出入する領域を含む第1の監視領域と、ドアパネル間の隙間の領域である第2の監視領域と、開口部の外側で開口部から規定範囲内である第3の監視領域とを規定する。また、領域規定手段9は、ドアの開閉の動作に伴って各監視領域の大きさを変化させる。判断手段10は、各監視領域内における物体の存否を判断し、検知出力手段11は、判断手段10の判断結果に応じた出力信号を外部に出力する。
(もっと読む)
距離画像センサ
【課題】可動部がなく耐久性や信頼性が高く、広範囲の対象空間を設定することを可能にしながらも投光に要するエネルギーを低減可能な距離画像センサを提供する。
【解決手段】発光源1は、強度が時間経過に伴って変化する変調光を投光する。演算処理部7は、発光源1による投光から撮像素子2による受光までの時間差に相当する情報を変調光の時間変化と撮像素子2の各受光領域での受光強度とから抽出し、距離を画素の値とする距離画像を生成する。発光源1の前方には、屈折と反射との少なくとも一方を利用して発光源1からの変調光をスリット光として対象空間に投光する投光光学系3が配置される。また、撮像素子2の前方には、スリット光により物体表面に形成される投光パターンの像が撮像素子2の受光面のサイズに合わせて投影されるように屈折と反射との少なくとも一方を利用して当該像のアスペクト比を調節する受光光学系4が配置される。
(もっと読む)
ビーム照射装置
【課題】目標領域におけるレーザ光の走査位置を示す信号を精度良く検出することにより、レーザ光の走査精度を高め得るビーム照射装置を提供する。
【解決手段】S/H回路34は、サンプルタイミングごとに入力電圧信号をホールドし、ホールド電圧信号を減算器35に出力する。減算器35は、入力電圧信号から、ホールド電圧信号を減算した減算電圧信号を、端子32bおよび比較回路36に出力する。A/D変換回路38は、減算電圧信号を、S/H回路34におけるサンプルタイミングに同期してデジタル信号に変換し、PSD処理回路7に出力する。こうすると、A/D変換回路38の分解能が有効に活用されるため、A/D変換回路38から入力される信号に基づいて信号演算回路7bにて位置検出信号を生成することにより、位置検出信号の精度が高められ得る。
(もっと読む)
ビーム照射装置およびレーザレーダ
【課題】目標領域に対するレーザ光の照射精度を高く維持しながら、制御回路の処理負担を軽減できるビーム照射装置およびレーザレーダを提供する。
【解決手段】スキャン制御部1aは、Tilt方向におけるミラー制御の半分の頻度で、Pan方向におけるミラー制御を行う。また、スキャン制御部1aは、PSD308上に設定された目標軌道上のQn、Qn+1、…に対応する位置にサーボ用レーザ光の実測位置が到達したことに応じて、レーザ光源401をパルス状に発光させる。これにより、走査用レーザ光は、サーボ用レーザ光の実測位置がQn’、Qn+1’、…に到達したタイミングで、目標領域に照射される。こうすると、Pan方向におけるミラー制御をラフに行いながら、略一定振り角毎に、走査用レーザ光を目標領域に照射できる。
(もっと読む)
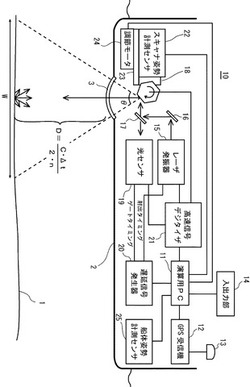
監視装置及び監視方法
【課題】所望の探索範囲を効率よく監視すること。
【解決手段】上空を飛行する機体に搭載され、上空から海上の様子を監視する監視装置であって、光源を備え、上空から海上の探索領域に向けて、複数のスリット状の光を照射する送光部11と、海上の物体により反射された複数の反射光を受光する受光部12と、受光部12により取得された反射光の情報から、光を反射した海上の物体が対象物か否かを判定する処理装置27とを具備する。
(もっと読む)
電磁高周波放射線を使用して物体の像形成を行うための方法およびデバイス
本発明は電磁高周波放射線を用いて物体(4)の像形成を行うためのデバイスであって、電磁高周波放射線のための少なくとも1つの検出器(1)と焦点を生成するための少なくとも1つの像形成デバイス(3a,b,c)とを包含する。電磁高周波放射線を用いて物体の像形成を行う装置及び方法を提供するために、本装置/方法は高い解像度で物体の急速な移動を記録することができるものであって、放射線の方向を変化させるための少なくとも1つのコントロールな可能な要素(2a,b,c)を有し、それが前記像形成デバイスの焦点が可動となるように適合されている。 (もっと読む)
レーザビーム照射装置
【課題】光学系を小さく設計しても、レーザビームの大出力化または高分解能化、及び、ビームパターンの歪みの緩和を両立できるレーザビーム照射装置の提供。
【解決手段】発光点22とレンズ10の間にプリズム24を配置する。プリズム24は、自身に対応する発光点22から発光されたレーザビームを、発光点22の配列の内側に向けて屈折させるように構成されている。プリズム24を透過した後にレンズ10に入射したレーザビームは、外側に向けて屈折する。そして、任意の広がり角でレンズ10から出射される。
(もっと読む)
光学式測距センサおよびそれを搭載した機器
【課題】簡単な構成で小型形状で長距離の測距が可能な光学式測距センサとそれを搭載した機器を提供する。
【解決手段】光を出射する発光素子11と、発光素子11から出射された光を集光して測距対象物10に照射する投光レンズ13と、測距対象物10からの反射光を集光する受光用集光部(14,15)、受光用集光部(14,15)によって集光された反射光を受光する受光素子12と、受光素子12から出力される信号電流から測距対象物10までの距離に対応する出力信号を得る信号処理回路16とを備える。上記受光用集光部(14,15)は、測距対象物10からの反射光を反射する反射面14aを有し、その反射面14aによって、測距対象物10から受光素子12までの光路を発光素子11側に屈曲させて、反射光を受光素子12に導く。
(もっと読む)
ビーム照射装置
【課題】位置検出信号に対するレーザ光(外乱光)の影響を抑制し、位置検出信号の精度を高めることができるビーム照射装置を提供する。
【解決手段】PSD308からの出力信号に基づいてサーボ光の受光位置に応じた信号を生成するPSD信号処理回路3を備える。PSD信号処理回路3は、目標領域に照射されるレーザ光の一部がPSD308に入射することにより生じる外乱信号をPSD308からの出力信号から除去する信号除去回路15、16、17、18を有する。
(もっと読む)
光スキャン装置
【課題】基本周波数によるゲイン上昇を有効に利用して少ない電流値で大きなアクチュエータの電磁駆動を得ることができ、小型且つ低価格な磁気回路を用いて光走査における光照射の時間の割合を高めた車両用光スキャン装置を提供すること。
【解決手段】ホルダに保持された光学素子の光軸に垂直な方向である第1の方向に上記ホルダを移動させる第1の駆動動作と、上記第1の方向の逆方向に移動させる第2の駆動動作と、を交互に繰り返し行う駆動手段と、上記ホルダの位置を検出する位置検出手段と、を具備し、上記第1の駆動動作に要する時間をT1とし、上記第2の駆動動作に要する時間をT2とし、1/(2×T1)=f1、1/(2×T2)=f2とし、上記ホルダと上記弾性支持手段とから成る系の上記弾性支持手段の基本共振周波数をf0とすると、上記f0、f1、及びf2は、0.6≦f1/f0、f2/f0≦1.4を満たす光学装置。
(もっと読む)
レーザレーダ及びレーザレーダの据付方向調整方法
【課題】据付時の自身の方向調整を簡単且つ高精度で行うことができるレーザレーダ及びレーザレーダの据付方向調整方法を提供する。
【解決手段】投光部2と、投光部2から発したレーザ光LTを走査する走査部3と、計測対象領域Eで反射して戻った反射レーザ光LRを受ける受光部4と、レーザ光LTの投光タイミング及び走査部3による走査を制御する制御部5と、投光タイミング及び受光タイミングに基づいて計測対象領域Eの三次元情報を取得する演算部6と、制御部5から投光指令を受けて投光部2に代わってレーザ光Lを照射して水平面及び垂直面に沿う面状レーザビームH,Vを形成するレーザマーカ10を備え、演算部6では、レーザマーカ10により面状レーザビームH,Vを形成した段階で、走査部3を介して受光部4に戻る面状レーザビームH,Vの水平面情報及び垂直面情報に基づいて、走査部3のピッチ方向,ロール方向及びヨー方向の各調整量を演算する。
(もっと読む)
方位測定方法及び方位測定装置
【課題】光の放射角を走査することなく、対象物の方位を高速度で検出する
【解決手段】所定波長帯域光を波長に依存して放射角が異なるように分散させて、放射する照射装置と、照射装置により放射された光の対象物からの反射光を受光する受光装置と、受光装置による受光結果から対象物の方位を決定する方位決定装置とを有する。また、照射装置は、スーパーコンティニュアム光を放射する装置である。パルス光を放射する時刻から、反射光の受光時までの遅延時間を測定し、遅延時間から対象物までの距離を測定する距離測定装置を有する。これにより光の放射角を走査することなく、一度に、3次元空間における対象物の座標を測定することができる。
(もっと読む)
接近検出装置
【課題】投光方向や受光方向を適切な角度に設定するにあたり、光学系と投光/受光素子の光軸合わせを精度よく行う必要がないようにし、組立作業効率の向上を図る。
【解決手段】投光用光学系14Eおよび受光用光学系14Rのシリンドリカルレンズ部14bは、いずれも光線をy方向(xz平面と直交する方向)にのみ集光し、x方向に関しては素通しである。投光素子11および受光素子12は、各々の光軸Ze,Zrが軸Z側に傾くように配置され、これにより光軸Ze,Zrが所定距離において軸Z上で交差する。
(もっと読む)
ビーム照射装置
【課題】目標領域内におけるスキャン動作を精度よく行い得るビーム照射装置を提供する。
【解決手段】制御処理部202は、ミラーアアクチュエータ100を第1基準位置と第2基準位置の近傍域で2次元的に駆動させ、これら基準位置を検出した時のPSD106の出力値(座標データ)を記憶する。温度変化や経年変化等の影響でPSDの状態が初期状態から変化すると、図8(b)に示す如く、記憶された座標データ(第1基準点R1´、第2基準点R2´)は、初期状態において設定した座標データ(第1基準点R1、第2基準点R2)からずれるようになる。制御処理部202は、これら2つの基準点におけるズレ量ΔP1、ΔP2とズレ量ΔQ1、ΔQ2に基づいて目標値テーブル202aのデータ校正を行い、校正した目標値テーブルを用いてサーボ動作を行う。
(もっと読む)
1 - 20 / 46
[ Back to top ]