
Fターム[5J084BB09]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学要素 (2,698) | レンズ (825) | 穴開きレンズ (7)
Fターム[5J084BB09]に分類される特許
1 - 7 / 7
距離計測方法および装置とそれを搭載した形状計測装置
光電センサ並びに物体検出及び距離測定方法
【課題】複数のパルスを発射する度に統計分析を行い、ノイズに強い角度分解的な距離測定に応用する。
【解決手段】監視領域に存在する物体の検出及び距離測定するレーザスキャナでり、多数の互いに連続した個別光パルスを出射する発光器、発射光線を周期的に偏向回転可能な偏向ユニット、前記偏向ユニットの角度位置信号を生成する角度測定ユニット、物体により直反射又は拡散反射された受信パルスを生成する受光器、及び、多数の受信パルスを時間的なヒストグラムにまとめ、該ヒストグラムに基づいて物体までの光通過時間を求め、該時間から物体の距離測定値を確定する解析ユニットを備える光電センサにおいて、前記解析ユニットが、その都度の角度位置信号に基づいて受信パルスのグループを選択し、それをヒストグラムにまとめ該グループのヒストグラムに基づいて確定された物体の距離に関する測定値を前記角度位置信号により表される検出角度に割り当てる。
(もっと読む)
マルチ信号処理装置、測距装置、及びマルチ測距システム

【課題】高分解能の測距精度を確保しながらも極めて安価に複数台の測距装置をロボット等に組み込むことが可能なマルチ信号処理装置等を提供する。
【解決手段】
複数の測距装置1と接続され、各測距装置1から入力される発光要求信号のエッジを検知すると対応する測距装置の発光部を駆動する発光信号を出力する発光制御部110,120,130と、発光制御した測距装置の受光部から受光信号を入力する入力処理部140と、入力処理した受光信号に基づいて被測定物迄の距離を算出する演算処理部150と、各処理部により実行される一連の処理を、任意の測距装置から入力される走査角度信号の一周期内で、各測距装置に対して順番に実行させるジョブ管理部110,120とを備えている。
(もっと読む)
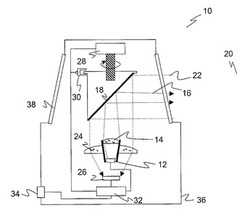
環境を光学的に走査し測定する装置
レーザスキャナ(10)として構成された、環境を光学的に走査し測定する装置であって、回転鏡(16)によって発光光線(18)を放出する発光素子(17)と、回転鏡(16)および光軸(A)を有する受光レンズ(30)を通過した後にレーザスキャナ(10)の環境内の物体(O)から反射されるかあるいはその他の形で散乱した受光光線(20)を受け取る受光素子(21)と、レーザスキャナ(10)の環境のカラー画像を撮影するカラーカメラ(23)と、多数の測定点(X)について、物体(O)までの距離を求め、この距離をカラー画像と連係させる制御評価ユニット(22)とを含む装置において、カラーカメラ(23)は、受光レンズ(30)の光軸(A)上に配置される。 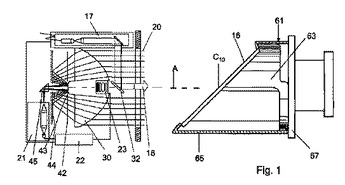 (もっと読む)
(もっと読む)
レーザレーダ装置
【課題】装置の小型化を実現することができるようにする。
【解決手段】レーザ光源18によってレーザ光を照射し、照射されたレーザ光が、2焦点レンズ16の中央部分16Aを透過する。2焦点レンズ16の中央部分16Aを透過したレーザ光は、測定領域内の対象物で反射し、反射光が、2焦点レンズ16の周辺部分16Bによって焦点位置に集光される。そして、焦点位置を含む所定領域内に配置された受光素子22によって、反射光が受光される。
(もっと読む)
一体型レーザ/赤外線前方監視光学装置
【課題】FLIR/レーザーに基づく目標化および撮像システムにおいて、IRのLOSとレーザーのLOSとの固定された整合誤差およびダイナミック整合誤差を低減することにより、当該エリア内の目標を認識する能力を大幅に改善する。
【解決手段】IRのLOSとレーザーのLOSの間の固定された整合誤差は、改善された内部ボアサイトモジュール(図10)および対応するボアサイト方法により低減される。ダイナミック整合誤差はレーザーエネルギーおよびIRエネルギーの双方に対する単一ピッチ(405)ベアリングおよび共通ピッチ/ヨーアフォーカル(401)を使用する光電気サブシステムによって低減される。
(もっと読む)
レーザースキャナ
空間的環境を検出するためのレーザースキャナが、固定子(21)と、第一回転軸まわりに回転自在に固定子(21)上に設けられたローター(1)と、第二回転軸まわりに回転自在にローター(1)上に設けられた回転体(2)と、を備える。レーザー源(6)と検出器(7)とが、ローター(1)に設けられている。光リンク(9)がローター(1)と回転体(2)の間で回転体(2)の両側の第二回転軸上に設けられて、発した光がレーザー源から第一光リンク(8)を介して回転体(2)へ導入され、受けた光が回転体(2)から第二光リンク(9)を介して放出される。第一回転ドライブ(25)がローター(21)を駆動し、第二回転ドライブ(26)が回転体(2)を駆動する。レーザー源(6)と検出器(7)と接続された二つのゴニオメータ(4)と評価用電子装置(5)が、検出した距離の対応する方向との関連付けを可能にする。回転体(2)は非常にコンパクトに設計でき、完全に受動的であるので、動力の供給や信号の送信を必要としない。 (もっと読む)
1 - 7 / 7
[ Back to top ]