
Fターム[5L096BA08]の内容
イメージ分析 (61,341) | 入力画像・用途の種類 (5,501) | 特定用途 (3,935) | その他の用途 (769)
Fターム[5L096BA08]に分類される特許
1 - 20 / 769
画像処理方法、画像処理装置、撮像装置およびプログラム
シフト及び画像の小さな歪みの推定
対象物識別装置および対象物識別方法
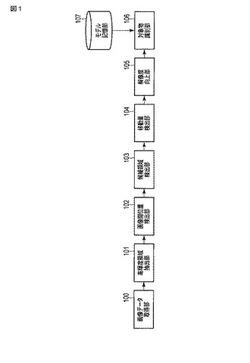
【課題】画像データからより確実に移動対象物を検出し識別する。
【解決手段】画像データ取得部(100)にて対象物を撮影した画像データを規定のレートで順次取得し、画素間位置検出部(102)にて順次取得される複数の画像データ間の相対位置を検出し、候補領域抽出部(103)にて前記相対位置から前記複数の画像データ間の差分を検出しその差分を前記対象物の候補領域として1つもしくは複数抽出し、移動量検出部(104)にて前記複数の画像データにわたって前記候補領域の移動量を検出し、解像度向上部(105)にて前記移動量を基に前記候補領域の解像度を向上させる。一方、予め対象物のモデルパターンをモデル記憶部(107)に記憶しておき、対象物識別部(106)にて、解像度を向上させた候補領域と記憶されたモデルパターンとを比較して対象物を識別する。
(もっと読む)
画像調整方法、画像調整装置及び画像調整プログラム

【課題】プレゼンテーション時の表示画像の視認性を向上させるのに有利な画像調整方法を提供する。
【解決手段】画像調整方法は、情報処理装置から画像データと、表示装置が表示する画像用の表示設定とを取得する取得工程(S702,S703)と、該表示設定を用いてプロファイルを作成し、作成したプロファイルを用いて表示装置から出力する画像の画像データに変換する変換工程(S704,S712)と、該画像データに含まれる第1コンポーネントと第2コンポーネントとの間の明度及び色度の差に関する視認性の評価値を演算する演算工程(S715)と、取得した視認性の評価値と、予め設定された基準値とを比較する比較工程(S716)と、比較工程で得られた比較結果が基準値を下回る場合に視認性が低いと判断し、明度または前記色度を変更することにより視認性を高める変更工程(S717)とを含む。
(もっと読む)
3次元データ映像の階段認識方法
【課題】3次元データ映像から階段の蹴上げ面及び踏み面を検出して、階段を認識する3次元データ映像の階段認識方法を提供する。
【解決手段】3次元データ映像の階段認識方法は、映像獲得部が、階段が位置する空間の3次元データ映像を獲得する段階と、映像処理部が、前記3次元データ映像から前記階段の連続する両踏み面の間の高さを計算し、前記計算された高さによって、前記連続する両踏み面の間に位置する各ポイントを判断し、前記連続する両踏み面の間に位置する各ポイントを通じて、前記連続する両踏み面の間に位置する蹴上げ面を検出する段階と、前記3次元データ映像から前記階段の連続する両蹴上げ面の間の幅を計算し、前記計算された幅によって、前記連続する両蹴上げ面の間に位置する各ポイントを判断し、前記連続する両蹴上げ面の間に位置する各ポイントを通じて、前記連続する両蹴上げ面の間に位置する踏み面を検出する段階とを含む。
(もっと読む)
注目度推定装置およびそのプログラム
【課題】映像コンテンツを視聴する人物の当該コンテンツに対する注目度を計測する注目度推定装置を提供する。
【解決手段】注目度推定装置1は、モーションキャプチャで計測された人物の骨格位置から身体動作量を計測する身体動作量計測手段11と、カメラ映像から人物の瞬目間隔時間を計測する瞬目間隔計測手段13と、カメラ映像から視線変動量を計測する視線変動量計測手段14と、身体動作量、視線変動量および瞬目間隔時間のそれぞれについて、予め定めた映像区間における統計特徴量を生成する統計特徴量生成手段30と、統計特徴量と注目度との対応関係を学習データとして予め記憶した学習データ記憶手段40と、学習データに基づいて、統計特徴量生成手段30で生成された統計特徴量に対応する注目度を、当該映像区間に対する注目度として特定する注目度特定手段50と、を備えることを特徴とする。
(もっと読む)
姿勢推定装置、姿勢推定方法及び姿勢推定プログラム
【課題】2次元の関節位置の安定した推定を行い、それに伴って3次元の姿勢推定の精度の向上を実現することができる姿勢推定装置を提供する。
【解決手段】3次元動作モデルデータを参照して、追跡対象について、初期の位置候補を複数設定する手段と、入力した画像から、追跡対象の位置候補における特徴量を算出し、該特徴量をテンプレート記憶手段に記憶されたテンプレートデータと比較した結果得られる類似度の重みに基づき、追跡対象の位置を推定し、追跡対象の位置の推定情報を出力する手段と、類似度の重みと、3次元動作モデルデータに基づき、追跡対象の位置候補を改めて設定する手段と、追跡対象の位置の推定と、追跡対象の位置候補の設定とを複数回数繰り返すことにより、追跡対象の位置を追跡する手段と、追跡対象の位置の推定情報と、3次元動作モデルデータを参照して、姿勢推定対象の3次元姿勢を推定する手段とを備えた。
(もっと読む)
類似画像領域検出方法、装置及びプログラム
【課題】検出対象とする画像領域を事前に指定することなく任意の画像領域を検出できるようにし、しかも当該任意の検出領域が画面内で移動した場合でも検出可能とする。
【解決手段】制御ユニット1の制御の下で、表示タイミングの異なる2枚の画像データを重ね合わせた状態で、その一方の画像データの位置座標を二次元方向(X軸、Y軸の各方向)に一定量シフトするごとに、当該画像データ間で画素ごとにそのRGB値の一致度数を計算してその全画素の合計を求め、この一致度数合計が最大値を示すときの画像データのシフト位置座標から一致画像領域を検出するようにしたものである。
(もっと読む)
消失点推定方法、消失点推定装置及びコンピュータプログラム
【課題】消失点の推定精度を向上すること。
【解決手段】入力された画像に含まれる直線を検出し、直線の中から、略垂直の直線である垂直方向直線を検出し、画像に含まれる直線のうち垂直方向直線ではない直線である非垂直方向直線と、垂直方向直線との組合せのうち、その端点同士の距離が閾値よりも短い組合せを組合せ候補として検出し、組合せ候補の中から、垂直方向直線と非垂直方向直線とが類似している組合せ候補を消失線組合せとして選択し、選択された複数の消失線組合せにおける、複数の非垂直方向直線に基づいて消失点の位置を推定する。
(もっと読む)
画像処理装置、画像処理方法およびプログラム
【課題】簡単な操作でユーザが特殊効果を与えることを希望する領域を抽出することのできる画像処理装置を提供する。
【解決手段】表示部に表示された画像データにおいて、ユーザから特殊効果を与える対象領域の指定を受け付ける受付部104と、対象領域の画像の特徴を示す特徴量に基づいて、画像データから類似領域を検索する類似領域検索部105と、類似領域のうち、所定の数の類似領域を表示部に表示する表示処理部103と、類似領域の選択を受け付ける受付部104と、選択を受け付けた類似領域と対象領域とに対し、特殊効果を与えるための特殊効果処理を行う特殊効果処理部111とを備える。
(もっと読む)
距離指標情報推定装置及びそのプログラム
【課題】本発明は、距離情報の客観的な信頼度である評価値を提示できる距離情報推定装置を提供する。
【解決手段】距離情報推定装置1は、ステレオ画像の類似度である誤差関数を計算する誤差関数計算部10と、距離の連続性を示すスムーズ関数を計算するスムーズ関数計算部11と、誤差関数とスムーズ関数とを含むメッセージを生成・伝搬するメッセージ生成・伝搬部12と、メッセージの評価関数を計算する評価関数計算部13と、評価関数が最小となる距離を距離情報として推定する距離推定部14と、距離情報の信頼度を示す評価値を計算する評価値計算部15と、オクルージョンに起因する推定エラーが生じた領域を判定するオクルージョン領域判定部17と、テクスチャに起因する推定エラーが生じた領域を判定する無テクスチャ領域判定部19とを備える。
(もっと読む)
情報処理装置、情報処理方法、情報処理装置用プログラム、および、記録媒体
【課題】対象物の追跡が正確にできる情報処理装置等を提供する。
【解決手段】動画の予め選択された1のフレームの画像における対象物2上に少なくとも1つのパーティクルpを設定し(S3)、予め選択された1のフレーム20以降、動画における時間的に前のフレームと時間的に後のフレームとを順次取得し(S4)、取得される前のフレームの画像と後のフレームの画像との背景差分画像30を算出し(S5)、算出された背景差分画像に応じて、パーティクルの追跡範囲の外縁3aを決定し、前のフレームの画像におけるパーティクルの位置を基準とする所定範囲内かつ追跡範囲の外縁内であって、基準としたパーティクルの位置の画素の色情報と類似の色情報を有する画素の位置に、後のフレームの画像におけるパーティクルを設定し(S6)、設定されたパーティクルの位置から、後のフレームの画像における対象物の位置を特定する(S9)。
(もっと読む)
検索装置、検索方法、記録媒体、ならびに、プログラム
【課題】ユーザの意思に基づいて位置が定められるオブジェクトの位置から検索クエリに指定すべき指定長を得る検索装置等を提供する。
【解決手段】検索装置101において、検知部102は、現実空間内でユーザの意思に基づいて位置が変化する複数のオブジェクトのそれぞれの位置を検知する。算出部103は、検知された複数のオブジェクトの位置から、ユーザの意思に基づく指定長を算出する。検索部104は、少なくとも、商品サイズと、商品画像と、を有する商品レコードが管理される商品データベースから、算出された指定長に基づく検索条件を満たす商品サイズを有する商品レコードを検索する。表示部105は、検索された商品レコードが有する商品画像を画面に表示する。
(もっと読む)
距離指標情報推定装置及びそのプログラム
【課題】本発明は、距離情報の客観的な信頼度である評価値を提示できる距離情報推定装置を提供する。
【解決手段】距離情報推定装置1は、ステレオ画像の類似度である誤差関数を計算する誤差関数計算部10と、距離の連続性を示すスムーズ関数を計算するスムーズ関数計算部11と、誤差関数とスムーズ関数とを含むメッセージを生成・伝搬するメッセージ生成・伝搬部12と、メッセージの評価関数を計算する評価関数計算部13と、評価関数が最小となる距離を距離情報として推定する距離推定部14と、距離情報の信頼度を示す評価値を計算する評価値計算部15と、オクルージョンに起因する推定エラーが生じた領域を判定するオクルージョン領域判定部17と、テクスチャに起因する推定エラーが生じた領域を判定する無テクスチャ領域判定部19とを備える。
(もっと読む)
画像マッチング装置及び画像マッチングプログラム
【課題】特徴ベースの画像マッチングにおいて、誤対応付けの影響を減らすことができる画像マッチング装置を提供する。
【解決手段】クエリ画像と、検索対象データベース内に予め保存された保存画像のそれぞれから抽出した特徴箇所毎に特徴量を算出する特徴表現手段と、クエリ画像と、保存画像間において、特徴表現手段により算出した特徴量からスコアを算出し、クエリ画像の特徴箇所に対応する保存画像へのスコア投票結果に基づき画像マッチングを行う照合手段とを備えた画像マッチング装置であって、照合手段は、クエリ画像と保存画像間において特徴箇所の対応付けの確からしさを示すスコアを投票し、スコア投票結果に基づき画像マッチングを行って、クエリ画像とマッチングする保存画像を求める。
(もっと読む)
個体識別装置、個体識別方法、及びプログラム
【課題】 所定の特性を有する平面形状のタガント(微小細粒)を物品に付与し、その分布位置に基づいて高精度に個々の物品を識別することが可能な個体識別装置等を提供する。
【解決手段】 個々の物品の基材上に、タガントをランダムに配置しておき、各物品をスキャナ等により光学的に読み取り、タガントの画素数(第1画素数)とタガントの特徴点を抽出し、基準特徴点データとして記憶しておく。識別対象となる物品を上述と同様の手法で読み取り、抽出されたタガント候補領域の中から、タガントの所定の画素数(第1画素数)と近似しない画素数を有するタガント候補領域をノイズとして除去する。その後、対象物品のタガント候補領域の特徴点を抽出する。そして、抽出した対象物品特徴点のデータと記憶されている基準特徴点データとを比較することにより識別対象とする物品と基準物品とが同一個体であるか否かを判定する。
(もっと読む)
画像編集装置およびプログラム
【課題】移動する物体を撮影した一連の高速連写画像/動画から適切に画像を抽出して、移動物体の解析に効果的な学習教材を生成することが可能な画像編集装置を提供する。
【解決手段】移動物体を高速連写撮影(撮影間隔T)した各画像P1〜P15の合成画像CGが生成され、該合成画像CG上での各移動物体KB1〜KB15の位置(xy座標)が検出されると共に、これに基づき同移動物体KB1〜KB15の移動の軌跡が検出される。すると移動物体KB1〜KB15の移動の軌跡の特徴点Qmaxに対応するところの画像P8が特定され、この特定画像P8を含めて前記高速連写の撮影間隔Tよりも長いユーザ設定された撮影間隔Δtに対応するところの各画像P2,5,8,11,14が前記高速連写の各画像P1〜P15の中から抽出され連写抽出画像ファイルとして前記設定撮影間隔Δtと対応付けて画像&座標範囲ファイル記憶部に教材データとして記憶される。
(もっと読む)
特定領域抽出装置及び特定領域抽出プログラム
【課題】画像中の特定領域を効率的かつ高精度に抽出する。
【解決手段】入力画像に対する特定領域を抽出する特定領域抽出装置において、前記入力画像に対して所定の形状からなる窓領域を設定する窓領域設定手段と、前記窓領域設定手段により得られる窓領域を前記入力画像の左右方向及び上下方向に対してそれぞれ所定間隔で移動させ、各移動位置における前記窓領域に含まれる画像特徴を取得する特徴取得手段と、前記窓領域の移動に伴う前記特徴取得手段により得られる画像特徴の変化量に基づいて1又は複数の境界を設定する境界設定手段と、前記境界設定手段により設定される境界に基づいて特定領域を抽出する特定領域抽出手段とを有することにより、上記課題を解決する。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】色の劣化が生じた画像からでも、もともとの色領域を正確に抽出することができる画像処理装置および画像処理プログラムを提供する。
【解決手段】前景特徴量算出部11は、それぞれの画素を対象画素として、その対象画素を含む予め決められた範囲の画素の色に対する対象画素の色の違いを示す特徴ベクトルを、予め決められた範囲の画素の色の平均色から対象画素の色への色空間におけるベクトルとして算出する。統合判定部12は、統合対象の二つの画素または領域についての前景特徴ベクトルの類似度に従って、統合の可否を判定する。領域統合部13は、統合判定部12で統合すると判定された二つの画素または領域を1つの領域に統合する。統合する際には、統合後の領域の前景特徴ベクトルを算出しておく。終了判断部14で終了条件を判定し、終了でない場合には統合判定部12に戻って、終了条件が満たされるまで処理を繰り返す。
(もっと読む)
オブジェクト検出装置
【課題】複数個のオブジェクトを高速に検出することが可能なオブジェクト検出装置を提供する。
【解決手段】分割部2は、複数個の検出対象オブジェクトについての全検出処理をM個に均等に分割する。設定部3は、連続して入力されるM個のフレーム画像のうちの各々のフレーム画像での検出処理を、分割されたM個の検出処理のうちの1つに設定する。検出部6は、各フレーム画像において、設定された検出処理を実行する。選択部5は、M個のフレーム画像のうちのいずれかで、いずれかのオブジェクトを検出した場合に、複数個の検出対象オブジェクトの中から検出されたオブジェクトと同一および関連する1以上のオブジェクトを選択する。分割部2、設定部3、検出部6は、選択されたオブジェクトについて再分割、再設定、再検出を行なう。
(もっと読む)
1 - 20 / 769
[ Back to top ]