
Fターム[5L096CA07]の内容
Fターム[5L096CA07]に分類される特許
1 - 20 / 24
画像処理装置および方法、プログラム、並びに記録媒体
【課題】より少ない仮定かつより少ない演算量で学習型画像処理を行うことができるようにする。
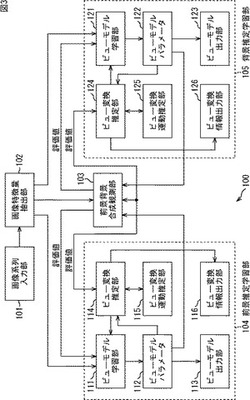
【解決手段】時刻sの画像特徴量に対して、前記画像の中の前景の画像の画像特徴量をパラメータとして有する前景のビューモデルに対して、幾何的な変換であるビュー変換を施すことで、時刻sの前景の画像を推定して推定前景ビューを出力し、時刻sの画像特徴量に対して、前記画像の中の背景の画像の画像特徴量をパラメータとして有する背景のビューモデルに対して、幾何的な変換であるビュー変換を施すことで、時刻sの背景の画像を推定して推定背景ビューを出力し、前記推定前景ビューおよび前記推定背景ビューを合成した合成ビューと、時刻sの画像特徴量を比較することで得られる評価値に基づいて、前記前景のビューモデルのパラメータを確率的生成モデルに基づいて更新することで前記前景と背景のビューモデルとを学習する。
(もっと読む)
撮像装置、撮像方法及びプログラム

【課題】被写体画像との合成用の背景画像の生成を適正に行う。
【解決手段】撮像装置100であって、背景内に動く被写体が存在する背景生成用画像を連続して撮像する電子撮像部2及び撮像制御部3と、電子撮像部により撮像される画角内で被写体画像の位置を指定する選択決定ボタン12bと、電子撮像部により連続して撮像された複数の背景生成用画像のうち、所定枚数の背景生成用画像に基づいて、背景内から動く被写体を消去して被写体画像との合成用の背景画像を生成する背景生成部8dと、を備えている。
(もっと読む)
街路環境内の3Dモデルを評価するための方法及び装置
【課題】 立体センサ技術を使用して街路環境内の3D−モデルを評価するための方法を提供する。
【解決手段】 この方法では、含まれたセンサは対で配置されている。本発明はまた、立体センサ技術を使用して街路環境内の3D−モデルを評価するための装置に関し、それはブラケット(33)上に取り付けられた少なくとも一対のセンサ(16,17,18)を含み、センサの各対は共通面内に位置されている。本発明は、困難なコントラスト条件下の立体効果を測定する問題を解決する。また、本発明によれば、含まれた各対のセンサが、画像面内のコントラストの低レベルが避けられるようにコントラスト情報に基づいて位置される方法が提案される。含まれた対のセンサ(16,17,18)が、センサ対(16,17,18)のセンサ(16a,16b,17a,17b,18a,18b)が互いから離れて水平に位置され、センサの一方がブラケット(33)の水平面の上に、他方が水平面(22)の下に位置されるようにブラケット(33)の本質的に水平な面(22)に対して相互に位置されることを含む装置が提案される。
(もっと読む)
撮像装置、画像処理方法及びプログラム
【課題】被写体領域の抽出を一回の撮影で簡便に行う。
【解決手段】撮像装置100であって、背景内に被写体が存在する被写体存在画像の周縁部分の非平坦度を演算する非平坦度演算部6と、演算された被写体存在画像の周縁部分の非平坦度が所定値以下であるか否かを判定する非平坦度判定部8aと、非平坦度が所定値以下であると判定された場合に、被写体存在画像の周縁部分から被写体存在画像中の被写体が含まれる被写体領域の抽出用の抽出用背景画像を生成する背景生成部8bと、抽出用背景画像と被写体存在画像の対応する各画素の差分情報に基づいて、被写体存在画像から被写体領域を抽出する切抜画像生成部8eとを備えている。
(もっと読む)
人検出装置及びそれを用いる負荷制御システム
【課題】入場者の検出処理を簡略化し、入場者の検出に要する時間を短縮した人検出装置及びそれを用いる負荷制御システムを提供する。
【解決手段】測定対象領域の床面には所定の着色を施してある。カメラ1A〜1Fは、測定対象領域を複数に分割した各分割領域の画像をそれぞれ撮像する。演算処理部20の記憶部25には、人がいない状態で撮像された各カメラ1A〜1Fの撮像画像における着色部分の面積が比較データとして記憶されている。演算処理部20の人数・分布検出部27では、各カメラ1A〜1Fの撮像画像から検出された着色部分の面積を、記憶部25に記憶された比較データと比較し、撮像領域に滞在する人により隠された部分の面積を検出することによって、各撮像領域毎に滞在者数を求める。そして、演算処理部20の点灯モード選択部28は滞在者の分布結果に基づいて測定対象領域に設置された照明器具4〜6の動作を制御する。
(もっと読む)
操作者判別装置
【課題】車載装置を操作する操作者が、運転者か、同乗者かを判別することができる操作者判別装置を提供する。
【解決手段】操作者判別装置3は、パターン130を有するアームレスト13と、操作者の腕を介してパターン130を撮像可能に設けられた近赤外線カメラ31と、近赤外線カメラ31によって撮像された画像300と、パターン130を構成する基本パターン131に基づいて基本パターン131の検出を行う検出部32aと、パターン130の検出・未検出に基づいて2値化処理を行って2値画像301を作成する2値化処理部32bと、2値画像301に基づいてラベリング処理を行って第1及び第2の連結成分20a、20bを抽出し、第1及び第2の連結成分20a、20bの重心の位置に基づいて前記操作者が運転者2Aであるか、同乗者2Bであるかを判別する判別部32cとを有する画像処理部32と、を備えている。
(もっと読む)
画像処理装置、画像処理方法及び画像処理プログラム
【課題】実環境で撮影された動画像を用いて、対象物の3次元モデルを忠実に再現することができる画像処理装置を提供する。
【解決手段】背景差分部14は、前景を含まず、処理対象画像から背景画像を差分して差分画像を作成し、領域区分部15〜前景領域抽出部20は、差分画像を基に、処理対象画像を、背景である信頼性が高い第1の領域と、背景である信頼性が低い第2の領域と、前景である信頼性が低い第3の領域と、前景である信頼性が高い第4の領域とに区分し、3次元モデル作成部21は、一のボクセルを一のカメラ視点で撮影された処理対象画像上に投影した投影点が第1の領域に属し、当該ボクセルを他のカメラ視点で撮影された処理対象画像上に投影した投影点が第4の領域に属する場合、一のカメラ視点で撮影された処理対象画像上に投影された投影点を判断対象から除外し、残りの投影点を用いて視体積交差法により対象物の3次元モデルを作成する。
(もっと読む)
画像処理装置、画像処理方法およびプログラム
【課題】時系列に撮像された複数の撮像画像から、その撮像画像の背景の状態や、動被写体の数、大きさ、変形、色などに左右されずに、動被写体の軌跡合成画像を効率良く生成する。
【解決手段】軌跡画素選択部121は時系列に撮像されたn枚の入力画像110において対応する画素位置のn個の画素値を選択する。背景画素選択部122は時系列に撮像されたn枚の入力画像110において対応する画素位置のn個の画素値の中から背景値の生成に必要な画素値を選択する。背景生成部130は、背景画素選択部122から供給された画素値に基づいて背景値を生成する。相違度生成部140は背景生成部130から供給された背景値と軌跡画素選択部121から供給された画素値との相違度を生成する。軌跡合成部150は相違度生成部140から供給された相違度に基づいて、軌跡画素選択部121から供給された画素値を合成する。
(もっと読む)
画像処理装置および画像処理方法、認識装置および認識方法、並びに、プログラム
【課題】画像データから背景を分離して、認識するべき物体に対応する領域を抽出する。
【解決手段】フォーカスカメラにより撮像して得られた背景を含む画像データに、注目画素の係数が8、近傍8画素の全ての係数が−1という3×3のフィルタをかけていることにより得られる画像は、黒い領域は近傍画素との差分が0に近いピンボケした画素であり、明るい(白い)ところは、パターンがシャープでボケていない画素であることを示す。それに対して、注目画素とその近傍領域との平均を求めるフィルタリング処理を行って、認識するべき対象物らしい領域を結合する。そして、フィルタリング結果を2値化処理した後、Morphological処理を行うか、フィルタリング結果のうち値が発生している黒い領域ではない部分をマスクすることにより、領域を分割して、背景を分離する。本発明は、画像処理システム、学習装置、または、認識装置に適用できる。
(もっと読む)
物体検出装置及びその方法
【課題】比較的安いコストで安定した物体の検出、追跡を行うことができる物体検出装置を提供する。
【解決手段】物体検出装置10は、カメラ部12、変化領域検出部14、交差領域検出部16、対象追跡部18、対象判定部20、背景更新部22で構成され、背景差分法と視体積交差法、及び、パタン学習によるマッチングや前時刻の対象の画像をテンプレートとしたマッチングの出力結果を相互に交換して、初期位置から移動した物体を対象と見なす。
(もっと読む)
動体の動作判別方法
【課題】観察方向によらずに、自動かつ高速に、対象動体の動作を認識可能な動体の動作判別方法を提供する。
【解決手段】予め動体の基本動作ごとのフレーム画像データAが点で表示される固有空間データAを作成してデータベース化する固有空間データ作成工程と、対象動体のフレーム画像データBが点で表示された固有空間データBと基本動作ごとの固有空間データAを比較して、固有空間データBからの距離が最も近い固有空間データAを選び、対象動体の動作を判別する判別工程とを有する動体の動作判別方法であって、基本動作ごとのフレーム画像データAは、動体に基本動作を行わせ、基本動作を行う動体を複数の画像入力手段を用いて多方向から撮影し、前処理手段によって、各画像入力手段ごとに取得した連続する複数のフレーム画像を重ね合わせることで作成される圧縮画像から得る。
(もっと読む)
移動物体検出装置及び移動物体検出装置用プログラム
【課題】 カメラ等の撮像装置がどの方向に移動した場合でも、当該撮像装置で撮像された画像に基づいて、当該画像中の移動物体を正確に検出すること。
【解決手段】 カメラCで撮像した動画像から、所定の特徴量に対する時空間画像20を作成する時空間画像作成部12と、時空間画像20中に表れる物体の所定部位の軌跡から、動画像中でランドマークとして任意に選択された静止物体Sの軌跡Kである基準軌跡K1を決定する基準軌跡決定部13と、基準軌跡K1と時空間画像20中の他の軌跡Kとを対比することで、当該軌跡Kの物体が移動物体Mか否かを判別する移動物体判別部14とを備えて移動物体検出装置11が構成されている。この移動物体検出装置11では、カメラCが任意の方向に任意の速度で動いていても、カメラCで撮像された動画像から、当該動画像中の移動物体Mを検出可能となる。
(もっと読む)
画像処理装置、画像処理方法及び画像処理プログラム
【課題】背景及び前景を含む動画像から前景領域を高精度に且つ高速に抽出することができる画像処理装置を提供する。
【解決手段】画像取得部13は、処理対象画像となる動画像を取得し、背景差分部14は、処理対象画像から輝度背景画像を差分して差分画像を作成し、領域区分部15は、差分画像の輝度成分を基に処理対象画像を4種類の領域に区分し、影除去部16は、領域の色成分と背景モデル画像の色成分との差分に基づいて対象物の陰を除去し、ラベリング部17、輪郭抽出部18、領域成長部19及び前景領域抽出部20は、影の領域が除去された4種類の領域を基に処理対象画像から前景領域を抽出する。
(もっと読む)
変形可能なオブジェクトを検出及び追跡する方法
【課題】形状プライアーを用いて、形状の変化するオブジェクトの追跡を可能にすること。
【解決手段】連続的に挙動の変化する変形可能なオブジェクトを検出及び追跡する方法において、先行する動きから、前記オブジェクトを表す埋込み関数の連続的に変化する挙動の時間的な統計形状モデルを構築し、構築した統計的形状モデルが不所望の現象の存在するときの前記オブジェクトの連続的な動きにマッチする確率を最大化することにより、不所望の現象の存在するときの前記オブジェクトの将来の連続的な動きに対して前記モデルを適用する。
(もっと読む)
対象物領域検出装置、方法およびプログラム
【課題】対象物領域を確実に得る。
【解決手段】画像フレームを入力する手段104と、画像フレーム内で対象物を検出して該対象物の位置を取得する手段102と、参照フレームの画像である参照画像および該参照フレーム内に在る対象物の位置を少なくとも1組以上取得する手段105と、参照フレームから、画像フレーム内の対象物と参照フレーム内の対象物との重なりを減らすための評価基準により少なくとも1以上の参照フレームを選択する手段105と、選択された参照フレームの画素値と画像フレームの画素値とが異なっている領域である差分領域を検出する手段106と、差分領域に基づいて、画像フレーム内の対象物が存在する領域を特定する手段107と、画像フレームおよび該画像フレーム内の対象物の位置を参照フレーム情報として記憶する手段103と、を備える。
(もっと読む)
運転者の顔向き判定装置
【課題】 顔以外の部位までの距離を顔までの距離とする誤判定を抑制して適切なサイズの顔画像を取得して顔向き判定を行うことが可能な運転者の顔向き判定装置を提供する。
【解決手段】 顔向きカメラ1とは車室内の異なる位置に配置され、異なる方向から運転者7の画像を取得する第2のカメラ(例えば、ルームミラー内蔵カメラ2)を備え、第2のカメラ2で取得した画像から画像処理部32で画像処理により、運転者7の顔位置を求め、距離判定部34により、運転者7の顔と顔向きカメラ1との距離を算出して、それに基づいてカメラ調整部35が顔向きカメラ1のズーム比を調整することにより、適切なサイズの運転者7の顔画像を顔向きカメラ1で取得できるようにする。
(もっと読む)
不正入室検出装置および検出方法、並びにこれを利用した入室管理システム
【課題】 管理区域への入室を管理するセキュリティシステムにおいて、特に、入室許可者に同伴する非許可者の不正入室を防止する不正入室検出装置および検出方法、並びにこれを利用した入室管理システムを提供する。
【解決手段】 外部からの出入を可能とする第1扉と、管理区域への出入を可能とする第2扉とによって閉鎖される認証室に個人認証装置2を設置し、当該個人認証装置2による照合結果に基づいて第2扉の開閉を制御して管理区域への不正入室を防止する入室管理システムにおいて、個人認証装置2を設置した認証室の上方(天井)に設置されたカメラ1と、当該カメラで撮影した認証室内全体の映像をもとに画像処理して認証室内の状態が「不在」「正規入室」「不正入室」の何れかを判定する不正入室検出装置3と、不正入室検出装置の判定結果と個人認証装置の照合結果とに基づいて、第1扉と第2扉の開閉を制御する制御装置4を備え、管理区域への入室を管理する入室管理システム。
(もっと読む)
撮影方法および撮影装置
【課題】背景となるカーテンやパネル等を不要とした小型で、かつ、被写体を正確に抽出して任意の背景画像を合成することができる撮影方法および撮影装置を提供する。
【解決手段】被写体が存在しない状態で撮影した背景画像と、画像出力に対応する第1主画像と、第1主画像とは撮影条件が異なる第2主画像を撮影し、背景画像と第1主画像との差分、第1主画像と第2主画像との差分から被写体を抽出することにより、前記課題を解決する。
(もっと読む)
撮影装置、撮影画像の画像処理方法及びプログラム
【課題】台座画像の輪郭を原稿画像の輪郭と誤判定しないようにして、原稿画像の輪郭を正しく取得する。
【解決手段】書画カメラ1に備えられた画像処理装置は、予め、台座13に原稿4が載置されていない状態で撮影を行って比較画像を取得する。そして、画像処理装置は、台座13に原稿4が載置された状態の縮小画像と比較画像とを比較して、その差分画像を取得する。画像処理装置は、差分画像を用いて台座画像の輪郭を除去し、原稿画像の輪郭を取得する。
(もっと読む)
画像における移動物体追跡方法及び装置
【課題】移動物体を一時的に隠す遮蔽物が存在し又は移動物体の中間部が背景画像と類似していても、1つの移動物体を画像上で1つの移動物体として認識可能にする。
【解決手段】画像のフレーム内に遮蔽物12の一端側及び他端側に沿ってそれぞれスリットSL1及びSL2を予め設定しておき、一方のスリット内で移動物体の一部が検出され、その後他方のスリット内で移動物体の一部が検出された場合に、該一方の移動物体の一部に付与されている識別符号を該他方の移動物体の一部に付与する。
スリットの替わりに遮蔽物領域を設定して、該領域に隠れた移動物体を推定してもよい。遮蔽物の一端及び他端に沿ったスリット画像をそれぞれ該一端及び他端から遮蔽物の内側へ所定回数複写することにより遮蔽物の幅を擬似的に狭く又は0にしてもよい。画像の縮小比が大きい領域ほどブロックサイズを大きくしてもよい。
(もっと読む)
1 - 20 / 24
[ Back to top ]