
Fターム[5L096FA59]の内容
Fターム[5L096FA59]に分類される特許
561 - 576 / 576
データ処理装置、データ処理方法、及びデータ処理プログラム
【課題】 構造物のひび割れや浮き、空洞等の変状部の有無及び位置を容易且つ安価に特定することを可能とし、また、当該変状部の経年変化をも容易且つ安価に把握することを可能とする。
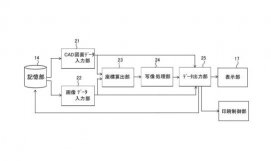
【解決手段】 データ処理装置は、寸法情報を有する線図情報からなるCAD図面データを入力するCAD図面データ入力部21と、画像データを入力する画像データ入力部22と、この画像データ入力部22によって入力された画像データ上における座標値を算出する座標算出部23と、画像データ入力部22によって入力された画像データ上の情報をCAD図面データ入力部21によって入力されたCAD図面データ上に写像する写像処理部24と、この写像処理部24によって作成された写像後のCAD図面データを含む各種データを出力するデータ出力部25とを備える。
(もっと読む)
奥行きマップの生成
画像(100)の各ピクセルについて観察者への距離を表す奥行き値を含む奥行きマップ(106)を生成する方法。該方法は:画像(100)を第一のセグメント(110)と第二のセグメント(108)にセグメント分割し;前記第一のセグメント(110)の第一の大きさに基づいて、前記第一のセグメント(110)のピクセルの第一のものに対応する奥行き値の第一のものを割り当て、前記第二のセグメント(108)の第二の大きさに基づいて、前記第二のセグメント(108)のピクセルの第二のものに対応する奥行き値の第二のものを割り当て、前記第一の大きさが前記第二の大きさよりも小さければ前記奥行き値の第一のものが前記奥行き値の第二のものよりも小さいようにする、ことを含む。 (もっと読む)
監視装置
監視装置は、カメラ(101)で撮影された全体画像をフレーム毎に受けて全体画像に対してフレーム間差分処理、又は事前に用意された背景画像との背景差分処理を行う移動体画像生成部(102)と、差分処理された画像(移動体画像)を1次元情報に変換し、周波数分析を行って、移動物体または群衆の密集の度合いを示す密集度を算出する密集度算出部(103)と、所定日時の密集度に基づいて移動物体又は群衆の基準密集度(モデル値)を算出するモデル生成部(104)と、現時刻における密集度と基準密集度との比較を行って、現時刻における密集度が基準密集度と異なるか否かを判断して判断結果を生成して報知部(107)に与える状況判断部(106)とを備える。  (もっと読む)
(もっと読む)
低照度の深度に適応可能なコンピュータ視覚を用いた移動物体検出
移動物体検出は距離又は深度情報を含む低照度画像に基づいている。視覚システムは、並進運動が支配的で少量の回転運動を伴うプラットフォーム上で動作する。運動が背景の移動と一致しない移動物体の検出は、形状に基づいたアプローチを補足する。低照度でのコンピュータに基づいた視覚支援では、同時およびその次のフレームブロブの対応を求めるために二段階技術が用いられる。平均風景視差を用いることにより、陽にエゴモーションを計算することなく、運動が検出される。これらの技術は、熱放射物体がホットスポットとして現れる赤外感光ビデオデータの特性を利用する。 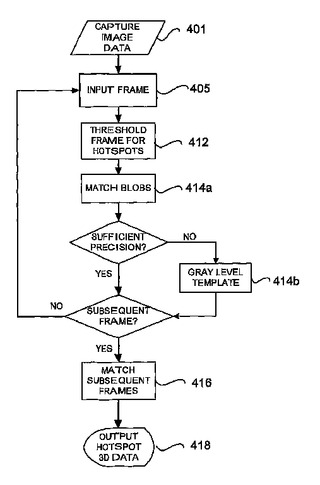 (もっと読む)
(もっと読む)
試料の面積またはコンフルエンスを決定するための方法と装置
試料の面積またはコンフルエンスは、試料と試料の周りのバックグラウンドに関する定量的位相データを得ることにより決定される。試料の境界は、位相データ測定値のヒストグラムを作成し、ヒストグラムの導関数を取って、それにより最大スロープの点を決定することにより、定量的位相データから決定される。境界に適用可能なデータ値を求めるために、既定のデータ値を上回るか下回るデータ値は試料内にあると見なすように導関数上の最もよく適合する線が使用される。 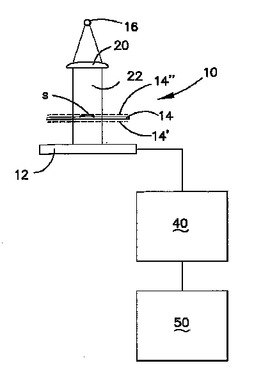 (もっと読む)
(もっと読む)
画像位置合わせ方法の改良

【解決手段】 2つの画像を関連付ける変換の少なくとも回転パラメータ及び変倍パラメータを判定する方法(200)が開示される。方法(200)は、画像の平行移動に対して不変量である各画像の空間領域表現を形成することにより開始する。次に、Log−Polar領域における相関が、表現の間で実行される。相関における大きさのピークの検出後、方法(200)は、大きさのピークの位置から、回転パラメータ及び変倍パラメータを判定する。 (もっと読む)
デジタルカメラ
【課題】特徴点を抽出し表示した後に容易に所望の特徴点を選択する方法や、これら選択した特徴点に関する情報を確実に記録することのできるデジタルカメラを提供する。
【解決手段】画像データから所定の特徴部位を抽出する抽出手段と、ユーザからの指示を受け付ける受付手段と、前記特徴点が複数抽出された場合に前記受付手段が受け付けた指示によりそれぞれの特徴部位を所定の順番で選択する選択手段と、前記選択手段により選択された前記特徴部位を特定する特定部位情報を表示する表示手段とをデジタルカメラに備える。
(もっと読む)
立体計測装置
【課題】ワークの立体形状を正確に計測する。
【解決手段】立体計測システムは、ワーク1100を撮像するカメラ100と、ワーク1100を照明するストロボ200と、カメラ100の電子シャッターに同期してストロボ200を発光させてワーク1100を撮像するように制御する制御回路と、撮像された画像データを画像処理する画像処理コンピュータとを含む。画像処理コンピュータは、撮像された画像データに対して、明度の不均一を補正するシェーディング補正回路と、補正された画像データに対して、カメラ100からワーク1100までの距離に応じた明度の違いに基づいて、ワーク1100の特徴量を算出する算出回路と、算出された特徴量に基づいて、ワーク1100の位置情報を作成する作成回路とを含む。
(もっと読む)
画像処理装置および方法、記録媒体、並びにプログラム
【課題】 任意の図形を分割後の面積ができる限り均一に分割する。
【解決手段】 ステップS11で、分割する対象領域と、その分割数Nが指定される。ステップS12で、対象領域を占める総画素数Totalが取得される。ステップS13で、パラメータkが1に初期化され、ステップS14で、第k番目の分割領域Skの理想値St[k]が算出される。ステップS15で、理想値St[k]に基づいて第k番目のセクションSkの画素数の決定値Sd[k]が決定される。
(もっと読む)
画像解析システム,画像解析方法および画像解析プログラム記録媒体
【課題】 画像フレーム間における物体間の対応関係に一対多,多対一などの多様性を導入し,安定した物体の追跡と,複数の物体の合体,分離等の状態に関する情報の出力を可能にする。
【解決手段】 映像を構成する各々の画像フレームにおいて対象物が占める画像領域から対象物の位置と大きさを取得する。次に,近接する二つのフレームにおいて検出された対象物について,前のフレームの対象物が後のフレームの対象物へ移動した場合の遷移コストを,二つのフレーム上の対象物の組について計算し,遷移コストから二つのフレーム上の対象物の間の対応関係を分類し,対象物の状態を判定する。以上の対象物の対応関係を,複数の画像フレームからなる映像の区間内の全ての隣接するフレーム間に対して計算した結果の情報を利用して,個々の対象物の移動軌跡を複数の画像フレームに渡って追跡する。
(もっと読む)
画像通信端末
【課題】 大掛かりな追従機構を用いることなく、利用者の位置にカメラ部側が追従し、利用者を良好な位置で撮影できる画像通信端末を提供する。
【解決手段】 カメラ部4で撮影された画像について、顔領域の位置及び大きさを抽出する顔抽出部7と、利用者に画像を表示する表示部3と、相手の情報処理装置に対し、画像についての双方向通信を行う通信部9と、カメラ部4で撮影された画像内において移動可能に設定される矩形の送信領域内の画像を、通信部9へ出力する送信データ処理部8とを備える。そして、カメラ部4で撮影された画像中において、送信領域と一体的に移動する有効領域が設定され、顔領域が有効領域を逸脱した場合に限り、顔領域の位置及び大きさに合わせて送信領域の位置を移動する。
(もっと読む)
注目領域抽出装置およびそれを用いた自動構図決定装置
【構成】 注目領域抽出装置およびそれを用いた自動構図決定装置10は、画像生成装置14を含み、画像生成装置14はカメラ12で撮影した映像からパノラマ画像の現画像を生成する。注目領域抽出装置20は、画像生成装置14から与えられる原画像から注目領域を抽出する。つまり、原画像の物理的特徴に従って人間の主観に合った評価をし、評価した結果に従って注目領域を抽出する。構図切り取り装置22は、抽出した注目領域および隣接する画像領域を、メモリ24に記憶された画家が描いた絵画や写真家が撮影した写真に関するデータを参照して、原画像から切り取る。つまり、絵画画像や写真画像と同じ構図で切り取ることができる。
【効果】 人間の主観に適合した注目領域を抽出することができる。また、バランスの良い構図を自動で決定することができる。
(もっと読む)
カメラ
【課題】 被写体の顔の向きを認識し、顔が所定の方向を向いた場合に被写体記録動作を行う。
【解決手段】 被写界の画像情報を検出する被写界像検出手段8と、該被写界像検出手段からの画像情報を基に被写体の顔を認識する顔認識手段21と、該顔認識手段からの情報により、顔が所定方向に向いているかを判定する判定手段22と、該判定手段の判定結果に応じて被写体記録動作を行わせる制御手段23とを有する。
(もっと読む)
電子部品の外観検査方法、外観検査装置及び外観検査処理をコンピュータに実現させるためのプログラムを記録した記録媒体
【課題】 電子部品のパッケージの撮影画像に含まれるむらや捺印文字等の影響を受けず、真の欠陥のみを確実に判別できる、電子部品の外観検査方法、外観検査装置及び外観検査処理をコンピュータに実現させるためのプログラムを記録した記録媒体を提供する。
【解決手段】 撮像手段103と、撮影した画像を複数の単位領域に分割して、各単位領域毎に、撮影した画像の濃淡レベルの分布をそれぞれ求める手段106と、各単位領域内における濃淡レベルの分布中、最多頻度の濃淡レベルから予め設定されたオフセット値を差し引いて、各単位領域における二値化レベルを求める手段107と、撮影した画像の各座標における二値化レベルを、各単位領域における二値化レベルに基づいて補間演算により求める手段108と、撮影した画像の各座標における各濃淡レベルと、求めた二値化レベルとを比較して、欠陥の存在を判定する二値化手段107とを具備する。
(もっと読む)
画像処理方法、画像処理装置及び記録媒体
【課題】 画像中の人物の顔に相当する領域の濃度が高濃度側又は低濃度側に偏倚している場合にも、人物の顔に相当する領域を高精度に判定する。
【解決手段】 人物の顔に相当すると推定される顔候補領域のうち、濃度が高濃度側に偏倚している(124が肯定) 領域に対し、画像上で顔候補領域から放射状に延びる探索線を設定し、顔候補領域内の濃度Dareaとの差が±α内の画素のみから成る探索線が有るか否か判定する(126〜130)。条件を満足する顔候補領域が存在していた場合には、画像を高濃度/低濃度/中間濃度の各濃度域の領域に分割し、中間濃度領域の面積が他の領域の面積よりも小さいか否か判定する(140〜144)。判定が肯定された場合には処理対象の画像を逆光シーンの画像と判定し、各顔候補領域に対して逆光シーンの顔領域としての確度を評価する(146〜152)。
(もっと読む)
画像処理方法、画像処理装置及び記録媒体
【課題】 画像中の主要部に相当すると推定される領域の誤抽出による影響を低減する。
【解決手段】 処理対象画像の画像データに基づき,人物の顔に相当すると推定される顔候補領域を複数抽出し(例えば領域A〜D)、互いに重複している顔候補領域対について重複度を演算し、他の顔候補領域と重複している顔候補領域の重み点数が、他の顔候補領域との重複のない顔候補領域の重み点数よりも高くなり、かつ他の顔候補領域との重複度合いが高くなるに従って重み点数が高くなるように、各顔候補領域に対して重み点数を設定する。各顔候補領域の重み点数を閾値と比較することで各顔候補領域から人物の顔に相当する顔領域を抽出し、顔領域濃度として、各顔候補領域の濃度値を重み点数に応じて重み付けした加重平均値を演算する。
(もっと読む)
561 - 576 / 576
[ Back to top ]