
Fターム[5L096FA67]の内容
Fターム[5L096FA67]に分類される特許
1,681 - 1,697 / 1,697
回転入力情報を生成するためのシステム及び方法
回転情報を取得する装置及び方法を提供する。複数の位置から複数のパターン化画像を捕捉し、複数のパターン化画像を相関させ、直線差分の組を生成し、直線差分の組を用いて、回転情報を生成する。好ましくは、複数の位置は、指紋スワイプセンサの第1の部分及び指紋スワイプセンサの第2の部分を含み、各部分は、指紋画像の部分を捕捉する。各部分は、2つの位置における指紋画像の部分を捕捉し、2つの位置の部分を相関させ、直線差分の1つの組を判定する。同時に、直線差分の組を用いて、回転情報を算出し、これに基づき、操作ホイール、ジョイスティック又はナビゲーションバー等の回転操作子をエミュレートする。 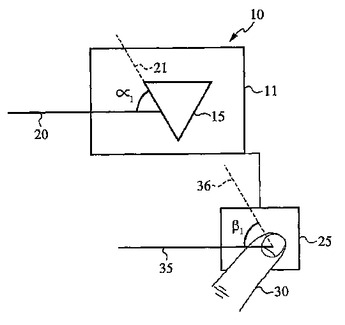 (もっと読む)
(もっと読む)
目標物の自動識別システム

第二輪郭(CM)と第一輪郭(CI)との近接性の測定方法は、第一輪郭の各点に関して、最も近いと決定された第二輪郭点と関連付けるステップ、及び前記第二輪郭点と関連付けられた第一輪郭点(I24、I28、I29)の集合の中から最も近い第一輪郭点(I24)を決定することにより、第二輪郭の各点(M15)と第一輪郭の一つ又はゼロの点との組合せステップを含む。
目標物の自動識別方法はこの近接性の測定プロセスを、第二輪郭として適用されるテンプレート輪郭の近接性の尺度を決定するために、第一輪郭として適用される画像輪郭に適用する。
(もっと読む)
有界三次元対象物の分類と空間ローカライゼーションのためのコンピュータ視覚システム
本発明は、有界三次元対象物の認識、分類、および空間ローカライゼーションのためのシステムと方法に関する。特には、対象物の認識、分類、およびローカライゼーションのためのコンピュータ化された方法に関する。本方法は、カメラにより記録された、または対象物のCAD表現を使用して構築された多数のトレーニング図に基づいて、トレーニングデータベースを生成することを含む。特徴的曲線は、トレーニング図から導出され、曲線のプリミティブが検出される。フィーチャの本質的および非本質的記述子が、対象物のクラスおよび図の姿勢状態に関するデータと共にデータベースに格納される。最終的には、認識は二段階で行われる。最初は、認識図の本質的記述子がデータベースの記述子と比較される。二番目に、最良の整合フィーチャから、どのフィーチャが、同じ姿勢状態にある同じ対象物クラスであることを示唆するという意味で、相互に一致するかが調べられる。 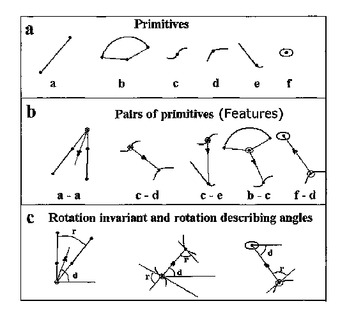 (もっと読む)
(もっと読む)
局所的曲率分布パターンの分析方法
複数の3Dボリューム・ポイントを含むディジタル画像中の病変部位及びポリープを検出する方法を提供する。この方法は、画像中の曲面を識別し(101)、曲面中のそれぞれのポイントに関して、第1曲率測度を計算し(102)、曲面中のそれぞれのポイントに関して、それぞれのポイントが1組のリングの中心点となり、それぞれのリングがこのリングの中心点から測地学的に等距離であるようにそれぞれのポイントを中心に1組のリングを形成し(103)、それぞれのリングに関して、第1曲率測度の標準偏差を計算し(104)、第1曲率測度の標準偏差が最小のリングを選択する(105)ステップを含む。選択されたリングに関して、第1曲率勾配を計算し(107)、曲率勾配がポリープまたは病変部位として予測されるパターンから逸脱しているポイントを曲面から消去する(108)。 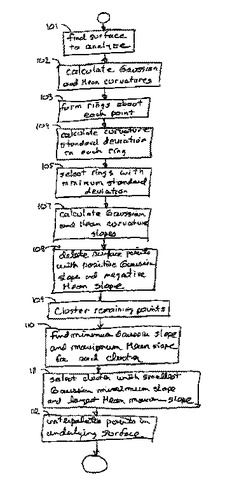 (もっと読む)
(もっと読む)
画像位置合わせ方法の改良

【解決手段】 2つの画像を関連付ける変換の少なくとも回転パラメータ及び変倍パラメータを判定する方法(200)が開示される。方法(200)は、画像の平行移動に対して不変量である各画像の空間領域表現を形成することにより開始する。次に、Log−Polar領域における相関が、表現の間で実行される。相関における大きさのピークの検出後、方法(200)は、大きさのピークの位置から、回転パラメータ及び変倍パラメータを判定する。 (もっと読む)
キャリブレーションチャート画像表示装置、キャリブレーション装置、キャリブレーション方法
【課題】カメラによるキャリブレーションシートの撮影が容易に行えるキャリブレーションチャート表示装置を提供すること。
【解決手段】所定のキャリブレーション撮影方向から撮影されたキャリブレーションチャート1の画像を記憶する校正画像記憶部59と、校正画像記憶部59に記憶されたキャリブレーションチャート画像を、前記キャリブレーション撮影方向と所定の画像回転角度に応じて表示するキャリブレーションチャート画像表示部61とを備えている。
(もっと読む)
掌紋認証の方法
個人の手の一部分を含む画像を取得し、前記の手のさまざまな特性を定義する一つまたは複数の特徴パラメータを見出すために前記画像を解析し、前記特徴パラメータをデータベース中の参照情報と比較する、ことを含むことを特徴とする生体認証の方法。  (もっと読む)
(もっと読む)
深度データを用いたビジュアルトラッキング
【課題】深度感知撮像技術を用いたリアルタイムビジュアル画像トラッキングにより、照度不変のトラッキング性能が得られる。深度感知(タイムオブフライト)カメラによって、同じ場面がリアルタイムで深度と色を持つ画像として提供される。深度ウィンドウはシャッター速度を制御してトラッキングする領域を調整する。深度画像データからポテンシャル領域が導き出され、トラッキングする目標物体の周縁部の情報が得られる。数学的に表される輪郭はトラッキングする目的物体をモデリングすることができる。この輪郭とトラッキングする目的物体の周縁部との間の適合度を決定し、深度データに基づいて、トラッキングのための位置情報が得られる。画像トラッキングに基づいて深度センサを用いる用途としては、頭部トラッキング、手のトラッキング、姿勢推定、ロボットの命令画定および、その他の人間とコンピュータの相互関係システムが挙げられる。 (もっと読む)
エッジ方向の推定
画像中のある特定のピクセル(100)の近傍に位置するエッジの向きを推定する方法が開示される。該方法は、候補エッジ方向の集合を生成し、前記候補エッジ方向のそれぞれについて対応するピクセル群(104、106)の対について前記対応するピクセル群の対の2つの群(104、106)のピクセル値の間の差に基づいて一致誤差を計算することによって前記候補エッジ方向を評価し、前記候補エッジ方向の集合からそれぞれの一致誤差に基づいて前記候補エッジ方向のある第1のものを選択し、前記候補エッジ方向の該第1のものを当該特定ピクセル(100)に割り当てる、ことを有する。この方法の利点は、必要とされる計算が比較的少ないことである。これは前記候補エッジ方向の集合の生成が以前の計算に基づいていることによって実現されている。
 (もっと読む)
(もっと読む)
光学端末装置、画像処理方法およびシステム
【課題】手ぶれによる画像の歪みを解消し、完全なイメージデータを取得することによって、文字認識を確実に実行できるようにするとともに、取込んだイメージデータに対する文字認識を端末あるいは携帯端末以外の装置において実行し、その認識結果をアプリケーション等で文字認識を行ってデータを所望の制御部に入力することを可能とした光学的文字認識装置およびシステムを提供すること。
【解決手段】マウス機能と連動しており、書類上に書かれた関心のある個所のイメージのみを取り込め、文字やコードの認識はアプリケーションの背後で行うことができ、その認識結果はアプリケーション上の予め希望した場所へ直接入力される。スキャナ・モジュールは、マウスや携帯電話に組み込むことができ、インターネットを利用した様々な応用が考えられる。
(もっと読む)
画像の自動傾き及びサイズ補正方法
【課題】本発明は、画像に対する基準位置(トンボ)が存在しなくても
画像の比較を可能にし、かつ安定した再現性を得るための技術である。
【解決手段】上記の問題点を解決するために下記のような手段を採用した。
(1)検査対象画像及びレファレンス画像に対して膨張処理を行なう。
(2)膨張処理した検査対象画像及びレファレンス画像に対して画像を縮小する。
(3)検査対象画像を少し傾けて、検査対象画像及びレファレンス画像のX座標幅及びY座標幅が同じくなるように変倍処理を行なう。
(4)上記の(3)を所定角度範囲の所定ステップで繰り返し行なう。
(5)上記(3)及び(4)の各ステップにおいて、検査対象画像及びレファレンス画像の一致率を求める。
(6)一致率の一番大きい角度を、傾き補正値として選択する。
(もっと読む)
舌映像からの関心領域の抽出方法及び舌映像を利用した健康モニタリング方法及び装置
【課題】 舌映像からの関心領域の抽出方法及び舌映像を利用した健康モニタリング方法及び装置を提供する。
【解決手段】 (a)各個人別に撮影された舌映像、テンプレート映像と少なくとも一つ以上の特徴要素に対する健康状態の判別結果を対応させたデータベースを構築する段階と、(b)個人の舌映像から分割された舌領域でテンプレート整合を利用して関心領域を抽出する段階と、(c)前記(b)段階で抽出された関心領域に対して少なくとも一つ以上の特徴要素を検出する段階と、(d)前記(c)段階で検出された特徴要素と前記データベースから検索される健康状態別の当該関心領域の特徴要素とから追跡される舌の状態変化から個人の健康状態を判別する段階と、よりなる。
(もっと読む)
車両制御装置、プログラム及び方法
【課題】運転者のブレーキタイミングの特性や車両を取り巻く状況に柔軟に対応することができる車両制御を提供する。
【解決手段】車両制御装置は、自車両の外部の画像を撮影する撮影手段と、他車両の接近を検出するためのテンプレートを記憶するテンプレート記憶手段を有する。テンプレートは、運転者のブレーキ操作に基づいて適宜更新される。車両制御装置は、撮影した画像とテンプレートとを比較して、前方を走行する車両が相当接近してきたために、自車両の減速や停止が必要であるか否かの判断を行う認識処理手段をさらに有している。認識処理手段によって減速や停止が必要と判断され、かつ、運転者によってアクセルペダルを戻したりブレーキペダルを踏むなどの衝突回避の操作が行われなかった場合は、動作指示手段によって自車両に衝突回避操作を実行させる。
(もっと読む)
立体計測装置
【課題】ワークの立体形状を正確に計測する。
【解決手段】立体計測システムは、ワーク1100を撮像するカメラ100と、ワーク1100を照明するストロボ200と、カメラ100の電子シャッターに同期してストロボ200を発光させてワーク1100を撮像するように制御する制御回路と、撮像された画像データを画像処理する画像処理コンピュータとを含む。画像処理コンピュータは、撮像された画像データに対して、明度の不均一を補正するシェーディング補正回路と、補正された画像データに対して、カメラ100からワーク1100までの距離に応じた明度の違いに基づいて、ワーク1100の特徴量を算出する算出回路と、算出された特徴量に基づいて、ワーク1100の位置情報を作成する作成回路とを含む。
(もっと読む)
画像処理装置および画像処理方法、並びにコンピュータ・プログラム
【課題】 複数視点位置からの画像データに基づいて高画質な三次元画像生成を可能とする装置および方法を提供する。
【解決手段】 パッチ面毎に、パッチ面と各視点間の距離データ、および各視点のパッチ面に対する方向データとを適用した画質評価値に基づいてテクスチャ画像の選択を実行し、パッチ境界部におけるテクスチャ画像間の画素値誤差データに基づいて、端点移動によるマッチング処理を実行し、隣接テクスチャ画像中、パッチ面に対して、正対した視点方向にあるテクスチャ画像の画素値に大きな重み付けを行ない、パッチ境界部における画素値を算出し、さらに、パッチ面内の画素値を、パッチ境界線からの距離に反比例した重み係数を適用して、パッチ境界線の画素値に基づいて算出する。
(もっと読む)
カメラ
【課題】 被写体の顔の向きを認識し、顔が所定の方向を向いた場合に被写体記録動作を行う。
【解決手段】 被写界の画像情報を検出する被写界像検出手段8と、該被写界像検出手段からの画像情報を基に被写体の顔を認識する顔認識手段21と、該顔認識手段からの情報により、顔が所定方向に向いているかを判定する判定手段22と、該判定手段の判定結果に応じて被写体記録動作を行わせる制御手段23とを有する。
(もっと読む)
物体の識別
物体識別の方法であり、本方法は、識別されるべき物体の画像に対し、前記画像における1組の位置のセットの各々について隣接する位置に対する強度変化の勾配が最大である方向を、その勾配の大きさとともに、決定するステップ、非線形関数を用いて勾配の大きさを修正し、その修正された勾配、および、位置のセットに対応する方向がその画像を表すベクトルを提供するステップ、ならびに、そのベクトルを、予め生成された、物体識別を供与する統計的モデルと比較するステップ、を含んでいる。 (もっと読む)
1,681 - 1,697 / 1,697
[ Back to top ]