
Fターム[5L096GA07]の内容
Fターム[5L096GA07]に分類される特許
81 - 100 / 132
輪郭抽出装置、輪郭抽出方法および輪郭抽出プログラム
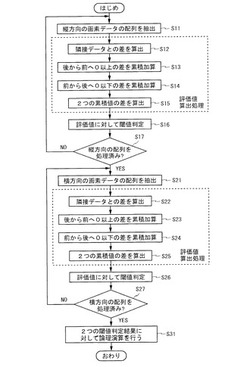
【課題】画素データがなだらかに変化する箇所に存在する輪郭を抽出する。
【解決手段】入力画像から抽出された縦方向の画素データの配列について、隣接データとの差を算出し(S12)、後から前へ向かう順に0以上の差を累積加算し(S13)、前から後へ向かう順に0以上の差を累積加算し(S14)、2つの累積値の差を算出し(S15)、得られた評価値に対して閾値判定を行う(S16)。横方向の画素データの配列に対しても同じ処理を行い(S22〜S26)、2つの閾値判定結果に対して論理演算を行う(S31)。このように、配列内で前方および後方にある直近の極大値との差に基づく評価値を算出し、評価値に対して閾値判定を行うことにより輪郭抽出結果を求める。
(もっと読む)
魚眼レンズカメラ装置及びその画像抽出方法

【課題】魚眼レンズカメラ装置及びその画像歪み補正方法及び画像抽出方法に関し、魚眼レンズカメラを任意の設置アングルで取り付けた場合の魚眼レンズ画像の歪み補正の画像変形処理を高速化し、又、人物像等の移動する像を精度よく検出して抽出し、モニタテレビ等に高精度で表示させる。
【解決手段】魚眼レンズ1−1、CCD撮像装置1−2で撮影した画像を映像メモリ1−3に記憶させ、画像補正処理部1−4は、魚眼レンズカメラの設置角を補正する座標変換と、魚眼レンズ画像の歪みを補正する座標変換とを組み合わせて演算する構成を備え、等面積射影の魚眼レンズ像を高速に写像変換する。更に魚眼レンズ画像内の領域に対応した重み付けを行って、人物像等の特徴量を抽出し、表示エリアを抽出する構成を備えている。
(もっと読む)
変化検出のための画像処理
基準画像及び画像シーケンス内の各入力画像を規定する画像データが処理されて、画像における変化が検出される。画素ごとに、当該画素における画像データの均一性の空間変化率を規定する値が計算される。各画像内の画素の異なる複数の領域が選択され、各領域内の値が連結されて、領域ごとにベクトルが規定される。ベクトルはその後処理されて、各画像内の対応する領域が比較される。比較の結果は、変化が起こった画像内のエリアを識別する相関マップを規定する。  (もっと読む)
(もっと読む)
画素ベース勾配クラスタリングによる多峰関数セグメンテーション方法
【課題】この発明は、例えばステレオカメラによる高さデータのような、多峰関数のセグ
メンテーションに適した高速なクラスタリングアルゴリズムを提案する。
【解決手段】本発明の画素ベース勾配クラスタリングによる多峰関数セグメンテーション
方法は、勾配クラスタの定義を取り入れた高速なクラスタリングアルゴリズムを用いるも
のであり、多峰曲面に関して極大点を中心とした領域に分割し、勾配に沿って下降する経
路を探索してクラスタ領域を決定する。前記勾配クラスタを、位相的な近傍関係を利用し
て離散空間における経路探索を行う。
(もっと読む)
画像処理装置および画像処理方法、学習装置および学習方法、並びにプログラム
【課題】人工画像の品質を的確に高めることができるようにする。
【解決手段】クラス分類部651は、階調が少なくエッジがはっきりした人工画像の位相の特徴に応じて、その人工画像により求められる、人工画像に比べて高品質な人工高品質画像の画素である注目画素を、クラスに分類する。予測係数メモリ654は、人工画像を用いた学習により獲得されたクラスごとの予測係数を格納する。予測部655は、人工画像と、注目画素のクラスの予測係数とを用いて演算することで、人工画像から人工高品質画像を求める。本発明は、画像処理装置に適用できる。
(もっと読む)
画像処理装置および方法、プログラム記録媒体、並びにプログラム
【課題】画像を画素単位で人工画像と自然画像とに分類する。
【解決手段】広域特徴量抽出部911は、画像より広域特徴量を抽出する。広域人工画度算出部912は、広域特徴量であるBEPおよびBFPの2次元空間における統計的な分布範囲に対する、抽出された広域特徴量の位置関係により、広域人工画度を算出する。狭域特徴量抽出部914は、画像より狭域特徴量として狭域特徴量を抽出する。狭域人工画度算出部915は、狭域特徴量であるPNDPおよびSNDPの2次元空間における統計的な分布範囲に対する、抽出された狭域特徴量の位置関係により、狭域人工画度を算出する。人工画度生成部913は、広域人工画度と狭域人工画度により人工画度を算出する。本発明は、画像変換装置に適用することができる。
(もっと読む)
画像解析装置
【課題】管腔内異常組織の存在位置の検出を向上させる。
【解決手段】CPUは、ステップS10にて例えばR信号について濃淡値勾配算出処理を実行し、ステップS11にて算出した濃淡値勾配より等方性変化特徴量算出処理を実行し、さらにステップS12にて算出した等方性変化特徴量よりポリープの存在する位置にポリープ候補画像26を生成するポリープ候補検出処理を実行する。
(もっと読む)
画像処理装置および方法、学習装置および方法、並びにプログラム
【課題】より高画質の高解像度の画像を生成することができるようにする。
【解決手段】SD画像信号から予測タップ抽出部206は予測タップを抽出し、クラスタップ抽出部203はクラスタップを抽出する。ノイズ加算量指定部202は、クラスタップを構成する画素の画素値から求められるアクティビティに基づいたクラス分類をするためのDR閾値を指定する。DRクラス分類部204は、DR閾値と、クラスタップのアクティビティとを比較した結果に基づいて、DRクラス分類を行う。また、波形クラス分類部205は、抽出したクラスタップに基づいて、波形クラス分類を行う。高解像度処理部207は、DRクラス分類と波形クラス分類の結果により特定される注目画素のクラスに対応する係数と、予測タップに基づいて、より高解像度のHD画像信号を生成する。本発明は、テレビジョン受像機に適用できる。
(もっと読む)
画像処理装置および画像処理方法、並びにプログラム
【課題】入力された画像を、画素数の異なる高品質な画像に的確に変換することができる。【解決手段】IP変換部121は、インターレース方式のSD画像に対して、IP変換を行う。出力位相変換部112は、IP変換の結果得られるプログレッシブ方式のSD画像に対して補間を行い、HD画像とする。自然画予測部113は、補間の結果得られるプログレッシブ方式のHD画像により求められる、そのHD画像のうちの自然画像を高品質にした自然高品質画像の画素である注目画素を、そのHD画像の特徴に応じて、クラスに分類する。自然画予測部113は、複数のプログレッシブ方式のHD画像を用いた学習により獲得された、クラスごとの予測係数を格納する。自然画予測部113は、HD画像と、注目画素のクラスの予測係数とを用いて演算することで、HD画像から自然高品質画像を求める。本発明は、画像処理装置に適用できる。 (もっと読む)
情報処理装置および方法、記録媒体、並びにプログラム
【課題】顔画像を少ないデータ量で判定できるようにする。
【解決手段】ラベルW11の画像を+20度ロール回転すれば、ラベルW12に分類される画像となるので、ラベルW12の画像を学習した場合に得られる2つのピクセル位置は、ラベルW11の画像を学習することにより得られた2つのピクセルの位置を、+20度ロール回転した位置とすることができる。すなわち未学習ノード81−1−1−2または未学習ノード81−1−1−2−1に対する評価値計算処理が行われる場合、ウインドウ画像上の、ラベルW11を学習した学習済みノード81−1−1−1または学習済みノード81−1−1−1−1の弱判別器による弱仮説f(x)を計算するのに用いられる2つの画素の位置を+20度ロール回転した位置の画素のピクセル差分特徴dが算出される。本発明は、ロボットにおいて人の顔を識別するのに適用できる。
(もっと読む)
変動領域検出装置及びその方法
【課題】照明変動やノイズに頑健で、過剰検出と検出漏れを抑制した変動領域抽出を行うことができる変動領域検出装置を提供する。
【解決手段】第1の変動検出部110と、第2の変動検出部111と、これら2つの変動検出結果を統合する変動領域統合部107とからなり、第1の変動検出部110は、注目画素と周辺画素の輝度差を判定して符号化する注目画像・周辺画素輝度差符号化部101と、学習画像における輝度差符号を記憶する輝度差符号記憶部102と、学習画像と入力画像における輝度差符号に基づいて入力画像における変動を判定する変動判定部103とからなり、第2の変動検出部111は、学習画像において注目画素から複数方向にある輝度差をもつ画素を探索する参照画素探索部104と、その参照画素の位置を記憶する参照画素位置記憶部105と、入力画像において注目画素と前記参照画素の輝度差が一定以内に保存されているかどうかに基づいて変動を検出する変動判定部106とからなる。
(もっと読む)
画像処理による移動体候補の検出方法及び移動体候補から移動体を検出する移動体検出方法、移動体検出装置及び移動体検出プログラム
【課題】監視カメラにより高速かつ高精度の侵入者検出を行う。
【解決手段】撮影画像の差分画像のうち周辺画素に対して動きベクトルの大きさおよび方向の異なる画素を検出し、撮影画像を分割した小領域のうち当該画素を含む小領域を検出する動き抑制処理と、撮影画像を分割して小領域より大きい大領域を作成し、該大領域に含まれる小領域の動きベクトルの絶対値の大きさにしたがって、大領域内の画素の明度または色の値が周辺領域に対して異なる大領域を移動体候補領域として検出する色抑制処理と、当該移動体候補領域に移動体が存在するか否かをパターン認識により判定する移動体判定処理とを行う。
(もっと読む)
動きベクトル検出装置及び動きベクトル検出方法
【課題】 入力画像と参照画像とのマッチングを少ない演算回数で比較し、動ベクトルを容易に求められる動ベクトル検出装置を実現する。
【解決手段】 参照画像及び対象画像それぞれの基準画素のX、Y方向の輝度信号レベルの微係数を求め、XY方向微係数の正負の組み合わせに応じて第1〜第4の4パターンを定める。参照画像のXY方向微係数を第1微分器71bで求め、第1符号判定回路72bで4パターンを判定する一方、対象画像のXY方向の微係数を第2微分器71aで求め、第2符号判定回路72aで4パターンを判定して第2格納部73a、73bに格納する。対象画像の画素に対応するパターンと参照画像のパターンとを比較し、一致するパターンが最も多い参照画像の画素ブロックを比較出力部741から出力し、参照画像の画素ブロックから対象画像の特定画素ブロックへの動きベクトルを検知部744で検知するようにした。
(もっと読む)
顔検出方法および装置並びにプログラム
【課題】画像に含まれる顔を、検出すべき顔の傾き、検出すべき顔の位置等を変えながら検出する顔検出処理において、処理時間を抑えつつ顔の検出確率を上げる。
【解決手段】顔が検出される確率が相対的に高い第1の条件、例えば、検出すべき顔の傾きが画像に垂直または水平な方向と一致する傾きであるときに、相対的に検出漏れが少なく処理時間が長い第1の検出処理、例えば、検出すべき位置の変化幅(顔画像か否か判別されるために順次切り出される部分画像Wの移動幅)が狭い検出処理を行い、第1の条件と異なる条件であるときに、相対的に検出漏れが多く処理時間が短い第2の検出処理、例えば、検出すべき位置の変化幅が広い検出処理を行う。
(もっと読む)
画像処理方法、画像処理用のプログラムならびにその記憶媒体、および画像処理装置
【課題】カラー画像に現れるエッジ点について、色彩変化の方向を正しく反映した角度データを取得できるようにする。
【解決手段】カラー画像を構成する各画素に順に着目しつつ、着目画素につき、その画素を中心とするマスク内の画像データを用いてX,Yの方向毎に色差Cx,Cyを求める。さらにこの色差の総和が所定値以上の画素について、その画素を通り、XY座標系の第1象限および第2象限に対応する2方向E1,E2毎に色差を求め、色差の大きい方の方向に色彩の変化が生じていると判別する。そしてこの判別結果および前記色差Cx,Cyの値に基づき、色彩変化が生じている方向を示す角度(エッジコード)を算出する。
(もっと読む)
画像処理装置および方法、並びにプログラム
【課題】より簡単な操作で、より効果的に画像を表示させることができるようにする。
【解決手段】ズーム領域設定部102は、差分大領域抽出処理部111が、フレーム画像から差分大領域を抽出し、フレーム内最大領域抽出処理部112が、その差分大領域情報から、フレーム内で最も大きな差分大領域を特定し、判定部113の判定結果に基づいて、ズーム領域が既に設定されている場合、更新部114がフレーム内最大領域を用いてズーム領域の設定を更新し、ズーム領域が設定されていない場合、設定部115がフレーム内最大領域情報に基づいて新たなズーム領域を設定し、ズーム領域情報記憶部116がズーム領域情報を記憶する。ズーム処理部103は、そのズーム領域情報に基づいて元画像の細かい絵柄が集中する部分を拡大表示させる。本発明は、画像処理装置に適用することができる。
(もっと読む)
画像処理装置および方法、並びにプログラム
【課題】より簡単な操作で、より効果的に画像を表示させることができるようにする。
【解決手段】ズーム領域設定部302は、差分大領域抽出処理部311が、フレーム画像から差分大領域を抽出し、ズーム領域中心設定部312が、その差分大領域情報に基づいてズーム領域の中心を設定し、ズーム領域範囲設定部313が、ズーム領域の範囲を設定し、ズーム領域情報記憶部316が、ズーム領域情報を記憶する。ズーム処理部103は、そのズーム領域情報に基づいて周囲の領域より目立つ絵柄の部分を画像出力部に拡大表示させる。本発明は、画像処理装置に適用することができる。
(もっと読む)
動物体検出装置および動物体検出方法
【課題】ブロックサイズ制御等の複雑な処理を必要とせず、固定フレームレートで動物体を高精度に検出する。
【解決手段】第1フレームの第1位置にある画素の輝度と、前記第1フレームの前記第1位置に隣接する第2位置にある画素の輝度とに基づいて、前記第1位置と前記第2位置との間の輝度を示す中間輝度を生成し、前記第1フレームより時間的に前の第2フレームの前記第1位置にある画素の輝度と前記中間輝度との差分と、前記第1フレームと前記第2フレームとの時間間隔とに基づいて動物体の移動速度を検出する。
(もっと読む)
エッジ方向の推定
画像中のある特定のピクセル(100)の近傍に位置するエッジの向きを推定する方法が開示される。該方法は、候補エッジ方向の集合を生成し、前記候補エッジ方向のそれぞれについて対応する試験ピクセル群(104、106)の対について前記対応する試験ピクセル群の対の2つの試験群(104、106)のピクセル値の間の差に基づいて一致誤差を計算することによって前記候補エッジ方向を評価し、前記候補エッジ方向の集合からそれぞれの一致誤差に基づいて前記候補エッジ方向の第1のものを選択し、前記候補エッジ方向の該第1のものを目標ピクセルブロック(102)に割り当てる、ことを有する。この方法の利点は、必要とされる計算が比較的少ないことである。これは前記推定エッジ方向が目標ピクセルブロック(102)に対して割り当てられることによって実現されている。
 (もっと読む)
(もっと読む)
検知対象画像判定装置、検知対象画像判定方法および検知対象画像判定プログラム
【課題】人物画像部分などの検知対象画像を効率良く検出判定することができる方法を提供する。
【解決手段】与えられた濃淡画像が検知対象画像であるか否かを判定する検知対象画像判定装置である。濃淡画像を構成する画素のうちの、予め学習により定められた隣接または近接する2つの位置の画素の組の複数個のそれぞれの組に対して設けられ、画素の組の2画素間の輝度値の差分を特徴量として求め、求めた特徴量に基づいて前記画素の組が検知対象画像の輪郭部分であるか否かを示す推定値を算出する弱判別手段の複数個を設ける。判定手段は、複数個の弱判別手段により算出された推定値に基づいて、与えられた濃淡画像が検知対象画像であるか否かを判定する。
(もっと読む)
81 - 100 / 132
[ Back to top ]