
Fターム[5L096GA07]の内容
Fターム[5L096GA07]に分類される特許
21 - 40 / 132
輝度勾配方向検出器及び輝度勾配方向検出方法
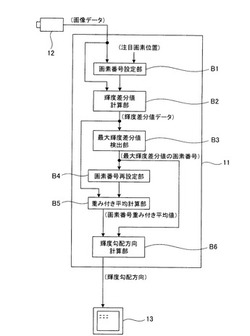
【課題】計算量が多い三角関数を用いることなく、高速に輝度勾配方向を検出する輝度勾配方向検出器及び輝度勾配方向検出方法を提供する。
【解決手段】注目画素を囲む8つの画素に時計回りに順に番号を割り振り(B1)、当該8つの画素の輝度値から注目画素を中心とする8つの点対称方向の輝度差分値を求め(B2)、8つの輝度差分値から最大となる最大輝度差分値を求め(B3)、最大輝度差分値を有する方向の画素が中央の番号となるように、8つの画素に時計回りに順に仮番号を割り振り(B4)、中央の番号とその両隣の画素の仮番号について、最大輝度差分値と両隣の画素の輝度差分値を重みとして、仮番号の重み付き平均値を求め(B5)、仮番号の重み付き平均値から中央の番号を引くと共に、最大輝度差分値を有する方向の画素の番号を加えることにより、注目画素における輝度勾配方向を検出する(B6)。
(もっと読む)
開眼状態検出装置

【課題】開眼状態の検出精度低下を防止することができる開眼状態検出装置を提供する。
【解決手段】画像情報に基づいて開眼状態を検出する開眼状態検出装置1であって、前記画像情報に基づいて上瞼の位置及び下瞼の位置を検出する瞼候補選定部23及び瞼検出部24と、上瞼の位置及び下瞼の位置に基づいて開眼状態を検出する開眼状態検出部25と、を備え、瞼候補選定部23及び瞼検出部24は、瞳孔を透過し網膜で反射される光によって発生する赤目領域の前記画像情報が検出結果に与える影響を他の領域の前記画像情報よりも小さくすることを特徴として構成する。
(もっと読む)
目立ち画像生成装置及び目立ち画像生成プログラム
【課題】評価対象の目立ちを色の差異を反映して定量的に評価する。
【解決手段】評価対象を撮像した撮像画像に対し、前記評価対象と周囲との色差が無い場合に目立ちが無いと評価し、前記評価対象と前記周囲との色差対比量が大の場合に、その大きさの度合いに応じて前記評価対象の目立ちを高く評価する色差目立ち評価部29と、前記色差目立ち評価部29の評価結果に基づいて、前記撮像画像の色差による目立ちの分布を示す目立ち画像を生成する画像化部25とを備える目立ち画像生成装置11を構成した。
(もっと読む)
直線検知装置
【課題】解像度を劣化させることなく計算量を低減することができ、しかも、左右の対称性を維持することができる直線検知装置を提供する。
【解決手段】画像のXY平面から複数の候補点を抽出する候補点抽出部2と、XY平面に置かれた原点を基準に各候補点をハフ変換する候補点ハフ変換部3と、ハフ変換で得られた各正弦波に従いθρ平面としてメモリ上に確保された二次元配列の配列要素に投票する配列投票部4と、投票値が閾値を超える配列要素からXY平面上の直線を検知する直線検知部5と、検知された複数の直線から消失点を推定する消失点推定部6と、消失点に画像の原点を置き直す消失点原点化部7とを備える。
(もっと読む)
画像処理装置、画像処理方法、および画像処理プログラム
【課題】周囲の画素と異なる画素値の異常部を精度良く検出すること。
【解決手段】本発明のある実施の形態の画像処理装置10において、演算部20は、画像内の検査対象領域の画素の画素値をもとに、検査対象領域の各画素の画素値に対して、検査対象領域内で連続的となる近似値算出部21と、近似値が検査対象領域の画素値に対して妥当か否かを評価する妥当性評価部22と、妥当性評価部22が近似値を妥当でないと評価した検査対象領域を分割する領域分割部23と、分割後の各領域を新たな検査対象領域に設定し、処理の繰返しを制御する対象領域再設定部24と、画像内の画素の画素値と妥当性評価部22が妥当と評価した近似値とをもとに異常部を検出する異常部検出部25とを備える。
(もっと読む)
まぶた検出装置及びプログラム
【課題】まぶたに化粧をしている場合であっても、まぶたと眼球との境界を正しく検出することができるようにする。
【解決手段】目画像におけるまぶたの境界における縦方向の濃淡変化の1次微分値と2次微分値とに基づいて、2次微分値を、まぶたの境界における濃淡変化の周波数の周期の1/4だけ、上方向にずらし、1次微分値と2次微分値とを組み合わせて、上瞼特徴量を算出する。算出された上瞼特徴量の縦方向のピーク点に基づいて、上まぶたと眼球との境界を検出する。
(もっと読む)
白線検出装置
【課題】本発明は、白線のエッジ抽出の際の閾値の決定手段を不要とし、処理を簡素化して、白線両端に生じるエッジを路面の模様、影、照明などの影響を極力排除し、信頼性高く抽出することができる白線検出装置を提供することを目的としている。
【解決手段】この発明は、白線のエッジか否かの判定対象である画素とこの画素から走査線方向に1〜K画素隣の画素との輝度の差分を算出する第1〜第Kの差分算出手段と、この第1〜第Kの差分算出手段により算出された差分が予め設定された閾値以上か否かを判定する第1〜第Kの閾値判定手段とを備え、この第1〜第Kの閾値判定手段の少なくともいずれか1つにより差分が閾値以上と判定されることを第1の条件とし、この第1の条件が満たされた場合に、判定対象である画素を白線のエッジとすることを特徴とする。
(もっと読む)
移動体識別装置、コンピュータプログラム及び移動体識別方法
【課題】高精度に移動体を識別することができる移動体識別装置、コンピュータプログラム及び移動体識別方法を提供する。
【解決手段】周辺増分符号算出部12は、撮像画像の注目画素毎に、注目画素とその注目画素の周辺にある複数の周辺画素との画素値の差分(例えば、増分)を符号化した周辺増分符号を算出する。マスク処理部13は、撮像画像の注目画素の周辺増分符号を、当該注目画素に対応する背景画像上の画素のマスク符号でマスク処理する。これにより、マスク符号と同じ周辺増分符号を除去する。候補領域抽出部14は、マスク処理後の周辺増分符号が残存している画素を、移動体候補領域を構成する画素として抽出する。移動体識別部15は、抽出された候補領域を構成する画素に基づいて移動体を識別する。
(もっと読む)
移動体識別装置、コンピュータプログラム及び移動体識別方法
【課題】高精度に移動体を識別することができる移動体識別装置、コンピュータプログラム及び移動体識別方法を提供する。
【解決手段】周辺増分符号算出部12は、撮像画像の注目画素毎に、注目画素とその注目画素の周辺にある複数の周辺画素との画素値の差分(例えば、増分)を符号化した周辺増分符号を算出する。マスク処理部13は、撮像画像の注目画素の周辺増分符号を、当該注目画素に対応する背景画像上の画素のマスク符号でマスク処理する。これにより、マスク符号と同じ周辺増分符号を除去する。候補領域抽出部14は、マスク処理後の周辺増分符号が残存している画素を、移動体候補領域を構成する画素として抽出する。移動体識別部15は、抽出された候補領域を構成する画素に基づいて移動体を識別する。
(もっと読む)
移動体識別装置、コンピュータプログラム及び移動体識別方法
【課題】高精度に移動体を識別することができる移動体識別装置、コンピュータプログラム及び移動体識別方法を提供する。
【解決手段】周辺増分符号算出部12は、撮像画像の注目画素毎に、注目画素とその注目画素の周辺にある複数の周辺画素との画素値の差分(例えば、増分)を符号化した周辺増分符号を算出する。マスク処理部13は、撮像画像の注目画素の周辺増分符号を、当該注目画素に対応する背景画像上の画素のマスク符号でマスク処理する。これにより、マスク符号と同じ周辺増分符号を除去する。候補領域抽出部14は、マスク処理後の周辺増分符号が残存している画素を、移動体候補領域を構成する画素として抽出する。移動体識別部15は、抽出された候補領域を構成する画素に基づいて移動体を識別する。
(もっと読む)
物体識別装置
【課題】識別精度の向上を図ることができる物体識別装置を提供する。
【解決手段】物体を識別する有効な特徴量を学習画像から統計的に複数抽出して物体の部分を識別する強識別器を複数生成し、この生成された複数の強識別器を直列的に組み合わせることで物体全体の識別を行う物体識別装置1であって、学習画像から抽出される特徴量の条件を強識別器ごとに設定する特徴サイズ設定部30と、条件を満たす特徴量を学習画像から統計的に複数抽出する特徴量抽出部31と、特徴量抽出部31により抽出された複数の特徴量を強識別器として保存する部分特徴モデル保存部21と、を備える。
(もっと読む)
白線検出装置
【課題】本発明は、白線のエッジ抽出の際の閾値の決定手段(適応制御的なもの)を不要とし、処理を簡素化して、白線両端に生じるエッジのうちの右側を信頼性高く抽出する手法を提供することを目的としている。
【解決手段】このため、走査線方向に隣り合う2つの画素の輝度の差分を算出する差分算出手段と、差分算出手段の差分が予め設定された閾値以上か否かを判定する閾値判定手段と、閾値判定手段で差分が閾値以上と判定された第1の画素から、白線の幅分と定めた画素数だけ走査線方向にずれた位置に、閾値判定手段で差分が閾値以上と判定された第2の画素が存在するか否かを判定する白線幅判定手段とを備え、白線幅判定手段で第2の画素が存在すると判定された場合に、第1の画素あるいは第2の画素を白線のエッジとする。
(もっと読む)
画像処理装置、画像処理方法、および画像処理プログラム
【課題】二次元直行変換の演算量を削減すること。
【解決手段】画像処理装置は、第2の予測ブロック内で第1の予測ブロックに重複していない画素に関する第1の画素値行列(Bc_l)と第1の予測ブロック内で第2の予測ブロックに重複していない画素に関する第2の画素値行列(Bp_l)との差分を算出する。そして、算出された差分値行列を直交変換の対象行列とし、画像処理装置は、差分値行列に対して直交変換行列を用いて第1の直交変換と第2の直交変換とを施す。画像処理装置は、第1および第2の直交変換後の変換係数行列を、第1の予測ブロックに関する第1の変換係数行列を用いて補完することで第2のブロックに関する第2の変換係数行列を算出する。
(もっと読む)
画像認識プログラム、画像認識装置、画像認識システム、および画像認識方法
【課題】画像から所定の物体または図柄の輪郭を高い精度で検出できるようにすること。
【解決手段】まず、画像における第1画素の画素値と、当該第1画素から所定画素数だけ離れた位置にある第2画素の画素値との差分を計算する。そして、当該差分が所定値以上である場合に、第1画素またはその近傍画素の画素値と、第2画素またはその近傍画素の画素値とに基づいて、エッジ判定閾値を計算する。そして、第1画素と第2画素に挟まれた各画素の画素値とエッジ判定閾値とを比較することによって、第1画素と第2画素の間に存在するエッジに対応するエッジ画素を検出する。
(もっと読む)
画像処理装置とその方法
【課題】処理画像で選択された注目画素の近傍画素についての増分符号算出の方向を限定することにより、出現確率のテーブルのサイズを削減し、必要なメモリ容量を削減する。
【解決手段】画像処理装置は、処理画像から注目画素を選択し、注目画素から所定範囲内に存在する複数の近傍画素の各々とを比較し輝度値の差を算出する輝度値差算出手段と、輝度値差算出手段により算出された輝度値の差と注目画素と複数の近傍画素の各々との相対的位置関係とに基づいて特徴量を算出し特徴量画像を生成する特徴量生成手段とを備え、輝度値差算出手段が、注目画素に関して互いに点対称の位置にある2つの近傍画素については、いずれか一方の近傍画素に関して注目画素との差を算出する。
(もっと読む)
車線境界全般を検出する方法およびシステム
【課題】 車線区分線や道路境界などの路面標識が連続的でない場合、湾曲している場合、そのサイズが既知でない場合などにおいても、極端に大きな計算能力を必要とすることなく、効率的に路面標識を検出する方法、装置およびシステムを提供する。
【解決手段】 イメージャ(1)から、車両(2)の前方の道路(4)の画像(3)を受けるステップと、画像中に識別された道路内に、関心領域を決定するステップと、関心領域内に車線区分線(7L、7R)を検出することによって、また車線区分線を検出することができなかった場合には、関心領域内に道路境界を検出することによって、路面標識(8L、8R)を検出するステップとを含んでいる。ウィンカがオンの場合には、前記各ステップをスキップする。
(もっと読む)
移動体追跡装置、追跡方法及びコンピュータプログラム
【課題】撮像画像に日照変化、日向及び日陰の領域の混在、低コントラスト、並びに移動体の部分的な重なり等が生じた場合であっても、多大な計算を必要とせずに、移動体の移動先を精度よく追跡することができる移動体追跡装置、追跡方法及びコンピュータプログラムを提供する。
【解決手段】車輌追跡装置1は、t番目の画像から車輌を含む正サンプルを抽出して、この正サンプルから複数の画素ペアを抽出すると共に、正サンプルの周囲から複数の負サンプルを抽出して、各負サンプルから複数の画素ペアをそれぞれ抽出し、画素ペアの輝度値の大小関係に基づいて正サンプルと負サンプルとの判別精度が高い画素ペアをペア特徴として取得する。次いで、t+1番目の画像から複数の画像領域を移動先候補として抽出し、移動先候補から抽出した画素ペアの大小関係が正サンプルのペア特徴に最も類似する移動先候補を移動体の移動先に決定する。
(もっと読む)
画像判定装置および画像判定プログラム
【課題】画像がぼけているか否かを好適に判定する画像判定装置等を提供する。
【解決手段】
第1の画像に対して画像をぼかす処理を行い第2の画像を生成するぼかし処理部(42)と、前記第1の画像のコントラストと前記第2の画像のコントラストとを比較した値であるコントラスト比較値を算出するコントラスト比較部(44)と、前記コントラスト比較値が所定のしきい値を超えているか否かによって、前記第1の画像がぼけているか否かを判定するぼけ判定部(46)と、を備える画像判定装置。
(もっと読む)
オブジェクト検出装置および方法並びにプログラム
【課題】検出対象画像から顔等の特定種類のオブジェクトを精度良くかつ高速に検出する。
【解決手段】顔の検出対象画像を所定倍率により多重解像度化して解像度が異なる複数の解像度画像を取得する。複数の解像度画像上に、各解像度画像間の所定倍率を補間するサイズを有する複数のウィンドウを走査させて部分画像を生成する。部分画像に基づいて、部分画像の画素値の分布に係る特徴量を算出し、特徴量を用いて部分画像が顔であるか否かを判定する。判定には、複数のウィンドウのサイズに対応する異なるサイズを有し、同一の照明補正がなされた複数のサンプル画像により、顔の分布に係る特徴量をウィンドウのサイズ毎に学習させた判別器であって、部分画像に係る特徴量を用いて部分画像がオブジェクトの画像であるか否かを判別する判別器を用いる。
(もっと読む)
エッジ検出方法及び画像処理装置
【課題】被撮像物の材質あるいは背景や周辺環境、さらには、光源の照明方向や明るさに左右されることなく被撮像物のエッジ位置を正確に検出する。
【解決手段】被撮像物IOのエッジを検出するために、制御部3は、被撮像物を実質的に半円形状で囲むように複数設けられた光源LEDを予め定められた順番で1つずつ点灯させることで、その点灯タイミングに同期して被撮像物を定点からカメラ2で撮像して当該被撮像物の濃淡画像を連続的に取得する。演算処理部4は、この点灯タイミングに同期して連続的に取得したすべての濃淡画像で、画素列毎に各画素の階調を比較して、階調の最大値となる画素と最小値となる画素との差分値を微分処理して画素列毎に微分値分布を算出し、この微分値分布から予め定められた閾値以上の画素位置をエッジ点として検出する。
(もっと読む)
21 - 40 / 132
[ Back to top ]